双车道公路机动车交通行为安全评估模型
2013-07-30郭忠印
方 勇,郭忠印
(同济大学 道路与交通工程教育部重点实验室,上海201804)
双车道公路机动车交通行为主要包括自由行驶、跟驰行驶与超车行驶3类[1].当驾驶员采取危险的驾驶行为,如超速、频繁超车、低车头时距值的跟驰行为,从而引起双车道公路交通系统的失调,极易发生侧翻、刮擦、碰撞事故.这是双车道公路交通事故率持续较高的主要原因之一[2].
机动车交通行为是复杂的,受到多种因素影响,一直是交通领域研究热点.国内外研究主要是从微观层面通过特定路段机动车交通行为调查研究单一因素对机动车交通行为的影响,如道路线形条件[3-4]、交通条件[3,5-6]、天气状况[7],或通过微观仿真利用机动车交通行为临界状态直接建立跟驰行为与超车行为的理论模型[8-9].从单因素或者微观仿真模型直接评价机动车交通行为安全性,不能从中观层次反映双车道公路运行环境对机动车交通行为的影响,而且微观特性对于双车道安全改造的宏观决策显然是不完全的,也是不科学的.因此,应从系统的角度综合双车道公路系统的各要素全面地评价机动车交通行为的安全性.
1 安全性状态判别指标与评价标准
根据双车道公路机动车交通行为类型划分[1],模型采用的安全性状态评价指标如下.
(1)超速指数CS.CS为路段机动车超速差值与限速值的比值,量纲为一,用于比较自由流下不同路段之间机动车超速行为安全性.

式中:ΔVcs为自由流下机动车超速差值;Vs为路段限速值,未明示限速路段取设计速度作为限速值;VC为自由流下机动车行驶速度.
(2)平均车头时距H.根据文献[10]研究成果,将车头时距4.8s作为双车道公路机动车自由驾驶行为与跟驰行为之间的界定阈值.因此可以将小于5 s的车头时距根据相应区间大小划分安全等级以表征路段机动车跟驰行为安全性.
(3)安全超车视距S.根据文献[9,11]对给定行驶速度下的双车道公路超车视距的研究成果为依据划分超车行为安全性.
根据以上分析,双车道公路机动车交通行为安全性指标及其等级划分标准见表1.

表1 双车道公路机动车交通行为安全性指标等级Tab.1 Safety indicators level of vehicle behaviors on two-lane highway
2 机动车交通行为安全评估模型构建思路
影响双车道公路机动车交通行为的因素众多[1-7].它们是交通量、交通流组成、平曲线半径、纵坡坡度、视距、路面摩擦系数与能见度指标、交通干扰、驾驶员生理与心理指标、交通工程设施、交通监控设施等.如果把各种影响因素都考虑到建模中,既不可能也不必要,如驾驶员生理疲劳具有随机性,个体指标不能反映整体驾驶员共有特性,建模中应忽略这类个体指标.因此,有必要选取与机动车交通行为关联度大的因素,结合已有文献[3-7]机动车交通行为的研究成果,选取交通量Q、交通组成W、平曲线半径R、纵坡坡度i、可视距离D、路面摩擦系数F、干扰程度P与驾驶员反应时间T八个指标作为影响双车道公路机动车交通行为较大的因素.这些指标都与机动车交通行为安全性之间存在着一定的非线性关系.然而由于我国双车道公路安全研究相关的数据资料处于积累阶段,基础数据比较匮乏,很难通过数理统计建立这种多指标的非线性关系.BP(back propagation)神经网络是一种能很好地解决非线性问题的工具,且具有良好的容错性和鲁棒性,特别适合进行多维输入到多维输出的非线性映射[12].此外该方法具有良好的自学习能力,随着学习的增加,可进一步优化模型.
如果把影响双车道公路机动车交通行为的因素集当成一个需要识别的模式,所对应的机动车交通行为状态作为该模式识别的结果,可利用神经网络方法实现识别.由于驾驶员反应时间一般取值2.5 s.选用固定值对BP神经网络模型训练意义不大,因此可不考虑该指标,实际采用{Q,W,R,i,D,F,P}7个指标作为输入变量、{VC,H,S}作为输出变量进行学习训练,再根据输出变量安全性评价标准,通过模糊逻辑确定各个输出变量的隶属度函数,从而可得到对应模糊集{很安全、较安全、一般、较危险、很危险}的隶属度,结合考虑3类不同机动车交通行为对安全性影响的权重,以实现机动车交通行为安全性等级的综合评价.
3 BP神经网络模型
3.1 模型学习训练方法
采用3层BP神经网络建立机动车交通行为模型,如图1所示.

图1 机动车交通行为BP神经网络结构Fig.1 BP neural network structure of vehicle behaviors

BP模型隐含层神经元数量p可由经验公式[12]确定.式中:m为输入层神经元数量;n为输出层神经元数量;a为常数,一般取1~9.
学习训练过程中需要的最小样本量q为[12]

机动车交通行为BP神经网络模型的隐含层与输出层分别采用Sigmoid函数和Purelin线性激励函数,即

式中:f(x)为隐含层输出值,x为输入值;g(x)为输出层输出值;w为权值;b为偏差.
由图1可知m=7,n=3,按照式(2)计算取p=9,再根据式(3)计算q≥93个;为提高训练的可靠性,应该采集包含各输入变量参数值范围组成的、具有代表性的样本路段,且为保证95%的置信度,每个路段每种机动车交通行为采集次数大于150次较为合适,以此计算每个样本路段各种机动车交通行为安全性状态判别指标均值,样本路段数据表达式为[Q,W,R,i,D,F,P,VC,H,S]T.
3.2 获取模型样本量的试验方法设计
为获得训练样本,在湖南湘西地区选择了5条双车道公路,分3次调研,实际以采集的114个单元路段机动车交通行为的统计值作为输出变量参数,相应运行环境参数作为输入变量,在具体单位路段选取时应尽量包含指标的各种可能性的取值,见表2,其他变量参数特征为:①根据输出变量各样本路段数据统计得到交通量与交通组成.②不同天气条件下路面摩擦系数取值范围(0.2,0.7)[13].③根据文献[13-14]取可视距离值;④干扰程度分3级考虑,无出入口的基本路段为1级,受干扰程度最低;带有出入口的基本路段为2级,受干扰程度较适中;过村镇路段为3级,受干扰程度最严重.

表2 样本路段选择与现场观测点布置方案Tab.2 Sample sections and observation point layout scheme
调研采用了一套多断面机动车驾驶行为摄录仪与2台MetroCount 5600车辆分型统计系统.其中多断面机动车驾驶行为摄录仪采用摄像存储的办法记录双车道公路上机动车的驾驶行为,布设如图2所示,其中全景摄录点4视现场情况确定;车辆分型统计系统配合多断面机动车驾驶行为摄录仪用于辅助路段部分点的机动车速度检测.另外在调研路段路面上采用油漆进行标记,护栏上用红色油漆或白色胶带做标记,路面部分油漆宽度1~2cm,每15~20m一道,护栏上可以宽一些,取5cm标定现场控制点的位置和坐标,并做好桩号标记和现场的记录工作.车辆分型统计系统布置方式见图3.
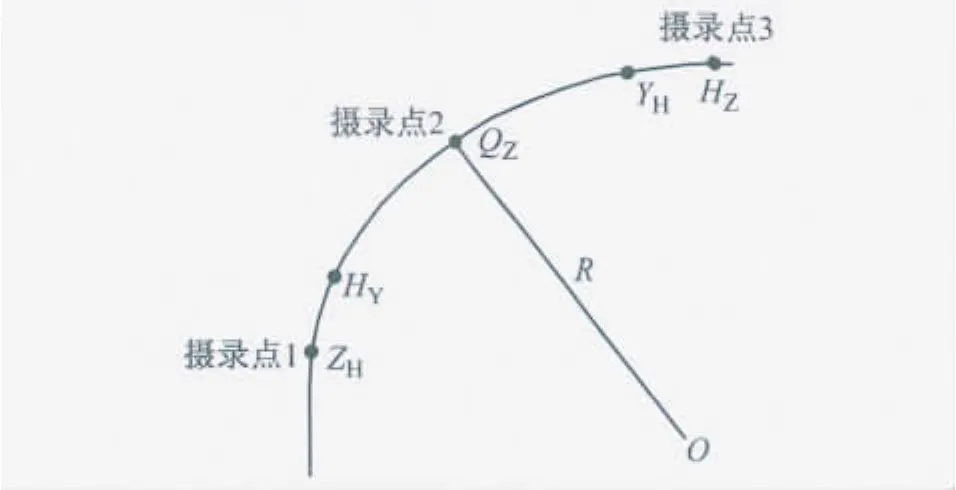
图2 样本路段摄录点设置示意Fig.2 Videotaping point settings for sample sections

图3 车辆分型统计系统布置方式Fig.3 MetroCount 5600layout scheme
3.3 模型调试训练与测试
3.3.1 模型调试训练
模型调试训练使用100个样本路段数据,将训练结果和实际路段机动车交通行为安全性状态判别指标实际值进行比较,如图4所示.
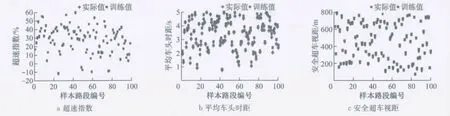
图4 机动车三类交通行为实际值与训练值比较Fig.4 Comparison of trained value and true value about vehicle behaviors
由图4可以看出模型实际值与训练值偏差较小.在100个训练数据中,超速指数误差小于1.5%的路段为96个,平均车头时距误差小于0.3s的路段为81个,超车视距误差小于20m的路段为83个,有效性分别为96%,81%与83%,因此模型具有良好的相关性.
3.3.2 模型测试
测试数据使用剩余的14个样本路段数据,测试结果如表3.

表3 机动车交通行为BP神经网络模型测试结果Tab.3 Test results of BP neural network model of vehicle behaviors
由表3可以看出,在14个测试路段中,其中超速指数误差小于3%的有8个,小于5%的有10个,仅有103号路段与111号路段2个路段差值大于10%;平均车头时距误差小于0.5s的7个,小于1.0 s的12个,仅有103号路段与107号路段2个路段差值大于1.0s;超车视距误差小于50m的有8个,仅有105号路段差值大于100m.由此可以看出,BP神经网络模型能够较好地表达影响双车道公路机动车交通行为的7个主要指标与机动车交通行为的关系,说明输入变量选择的科学性,也说明模型具有良好的应用价值.此外,可根据对双车道公路运行环境指标的细化,如研究干扰程度对交通流影响模式,客观量化干扰程度,可进一步提高神经网络模型预测精度,提高普通应用性.
4 模糊评判模型
4.1 模糊集与隶属函数的确定
在机动车交通行为安全评价研究中,由于安全阈值的不确定性,可采用模糊评判方法[15],可将安全水平很安全(ω1)、较安全(ω2)、一般(ω3)、较危险(ω4)、很危险(ω5)5个状态构建模糊集,表达为{ω1;ω2;ω3;ω4;ω5}.
由于机动车交通行为安全性评价指标CS,H与S在安全评价标准上呈线性分布,因此选用三角形和半梯形隶属度函数[16]可以比较客观真实地反应实际情况,如图5所示.
4.2 机动车交通行为安全等级划分方法
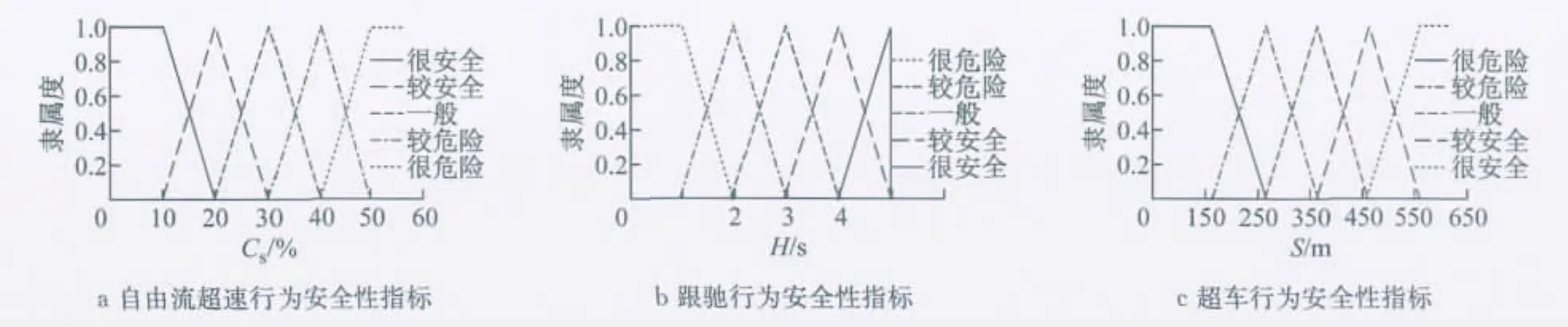
图5 模糊变量的隶属度函数Fig.5 Membership functions of the fuzzy variables
安全等级划分的边界具有模糊性与经验性,且安全水平的变化是渐进上升的,从而利用5个模糊集可以更加精确地区分不同路段运行环境下机动车交通行为安全水平的差异.
基于以上分析,将不同类型的机动车交通行为分为5个等级:Ⅰ级、Ⅱ级、Ⅲ级、Ⅳ级与Ⅴ级,分别表示很安全、较安全、一般、较危险、很危险5种安全状态,因此相应安全等级由相应模糊集最大隶属度决定,如Ⅱ级为“较安全”状态,由相应的最大隶属度ω2控制.当安全水平介于“很安全”与“较安全”之间,ω2>ω1,或者安全水平介于“较安全”与“一般”之间,ω2>ω3,这2种情况时由ω2控制,因此安全状态偏向于“较安全”状态,可以认为机动车交通行为处于“较安全”状态,ω2值越大,安全水平越高.
选取测试机动车交通行为BP神经网络模型可靠性的14个路段说明上述的应用.根据表1的评价标准,14个路段机动车交通行为安全性等级评价结果如表4.由表4可知,利用模糊评判方法得到的各类机动车交通行为安全等级比利用经典集合理论评价结果更加精确,不仅表现为预测的安全等级与实际的一致性更高,且相应等级都以隶属度加以区分.

表4 机动车交通行为安全性等级评价Tab.4 Safety evaluation results of vehicle behaviors

表4 (续)Tab.4 (Cont.)
5 基于空间向量理论的机动车交通行为安全性综合评价
对于考虑单一类型的机动车交通行为安全性,可直接根据隶属度大小决定属于某安全等级,可以采用三维向量形式描述3类双车道公路机动车交通行为处于的安全状态.为了综合性地对各路段的机动车交通行为安全性作比较以及为实际安全工程改造或者安全管理提供决策支持,有必要结合三维权重向量的综合评价指标以描述路段机动车交通行为的安全性.本文针对3类机动车交通行为各自安全等级以及3类机动车交通行为指标重要程度的权重值综合确定的空间向量作为机动车交通行为安全性综合评价指标.

式中:VBS为机动车交通行为安全性综合评价向量;ωi,ωj,ωk分别为自由流超速行为、跟驰行为、超车行为3类机动车交通行为安全性空间向量;a1,a2,a3分别为用层次分析法确定的与3类机动车交通行为安全重要程度相关的权重常数,经计算得(0.558,0.320,0.122).
由于3类机动车交通行为各自独立,各自空间向量分别表达为ωi=(ωi,0,0),ωj=(ωj,0,0),ωk=(ωk,0,0),因此,利用空间直角坐标系表达4类空间向量各自关系见图6,图中α,β,γ分别表示为VBS与ωi,ωj,ωk之间的夹角.
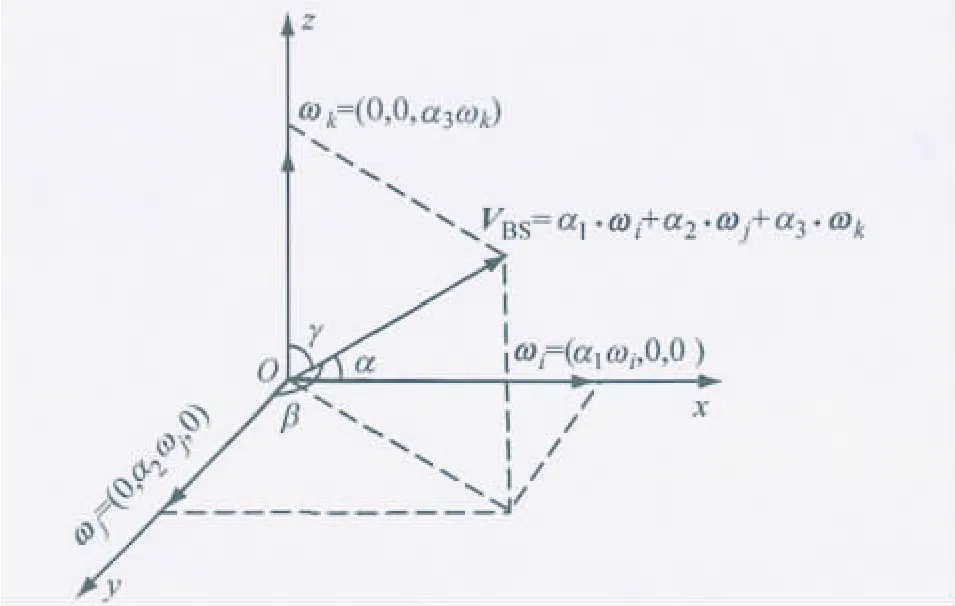
图6 机动车交通行为安全性空间向量Fig.6 Space vector of vehicle behaviors safety
根据图6可以看出,综合评价指标向量VBS大小表征了3类机动车交通行为的综合安全性,α,β,γ反应了机动车交通行为综合安全性倾向于某类行为的偏好程度,相应角度值越小表示越偏好于该类机动车交通行为.此外,计算多个路段相应的综合评价指标向量,通过综合向量之间的夹角余弦值与顶点间距离度量(一般采用欧氏距离)可以表征多个路段间机动车交通行为安全性相似程度,如图7所示,以路段M与路段N说明.从图7可以看出距离度量(VBSm,VBSn)衡量的是各路段空间各点间的绝对距离,跟各个点所在的位置坐标直接相关,表征各路段机动车交通行为综合安全性的绝对大小差异性;而余弦相似度cosθ衡量的是空间向量的夹角,体现方向上的差异,表征各路段机动车交通行为综合安全性的偏好差异性.因此,可以利用综合评价向量表达单个路段机动车交通行为综合安全性,且可比较相邻路段机动车交通行为安全一致性,也可利用多个路段机动车交通行为安全性综合值和相似度等参数为安全改进决策提供科学支持.

图7 路段机动车交通行为安全性相似度示意Fig.7 Similarity expression of vehicle behaviors safety
6 结语
(1)引入神经网络方法解决运行环境与机动车交通行为之间的非线性问题,利用模糊评判方法划分机动车交通行为安全等级,通过14个路段测试数据的对比反映模型具有一定的科学性与应用性.该方法与以往的机动车交通行为安全性评价方法相比具有以下特点:①运行环境七大主要指标易于观测,使评价指标易用于预测与安全性分析;②评价结果更加真实可靠;③使得机动车交通行为安全研究从微观行为向中观行为研究过渡,能够为管理者提供更多的信息支持.
(2)利用综合评价向量表达机动车交通行为综合安全性的方法能够有效地表达单个路段、相邻路段、多个路段以及路网的机动车交通行为安全性,且该方法可拓展应用于道路交通系统综合安全性各个领域.
[1]AASHTO.Highway safety manual[R].Washington D C:American Association of State Highway and Transportation Officials,2010.
[2]郭忠印.道路安全工程[M].北京:人民交通出版社,2012.GUO Zhongyin.Road safety engineering[M].Beijing:China Communications Press,2012.
[3]Haneen F,Shlomo B,Abishai P,et al.A passing gap acceptance model for two-lane rural highways[J].Transportmetrica,2009,5(3):159.
[4]Schneider IV W H,Savolainen P T,Moore D N.Effects of horizontal curvature on single-vehicle motorcycle crashes along rural two-lane highways[J].Transportation Research Record 2194,2010:91.
[5]邵春福,魏丽英,贾斌.交通流理论[M].北京:电子工业出版社,2012.SHAO Chunfu,WEI Liying,JIA Bin.Tragic flow theory[M].Beijing:Publishing House of Electronics Industry,2012.
[6]王欣,李文权,王炜.基于驾驶行为共性建模的速度-密度关系研究[J].公路交通科技,2008,25(9):116.WANG Xin,LI Wenquan,WANG Wei.Study on the speeddensity relationship based on modeling common characteristics of driving behavior[J].Journal of Highway and Transportation Research and Development,2008,25(9):116.
[7]何杰,刘霞,陈一锴,等.恶劣天气路面条件对行车安全的影响[J].交通运输工程学报,2011,11(1):58.HE Jie,LIU Xia,CHEN Yikai,et al.Influence of road condition on running safety in atrocious weather[J].Journal of Traffic and Transportation Engineering,2011,11(1):58.
[8]许伦辉,罗强,吴建伟,等.基于最小安全距离的机动车跟驰模型研究[J].公路交通科技,2010,27(10):95.XU Lunhui,LUO Qiang,WU Jianwei,et al.Study of carfollowing model based on minimum safety distance[J].Journal of Highway and Transportation Research and Development,2010,27(10):95.
[9]单晓峰,夏东,王昊.双车道公路超车两难区域研究[J].公路交通科技,2007,24(3):111.SHAN Xiaofeng,XIA Dong,WANG Hao.Dilemma zone in two-lane highways[J].Journal of Highway and Transportation Research and Development,2007,24(3):111.
[10]常玉林,王炜,邓卫,等.双车道公路车头时距分布模型研究及应用[J].东南大学学报,1999,26(6):108.CHANG Yulin,WANG Wei,DENG Wei,et al.Research of the headway distribution models on two lane highways and their applications[J].Journal of Southeast University,1999,26(6):108.
[11]王润琪,周永军,肖传恩.双车道公路超车视距计算方法[J].交通运输工程学报,2011,11(3):68.WANG Runqi,ZHOU Yongjun,XIAO Chuanen.Calculation method of overtaking sight distance for dual-lane highway[J].Journal of Traffic and Transportation Engineering,2011,11(3):68.
[12]胡守仁,沈青.神经网络应用技术[M].长沙:国防科技大学出版社,1993.HU Shouren,SHEN Qing.Technology &applicafions of artificial neural network[M].Changsha:National University of Defense Technology Hall,1993.
[13]方勇,李志勇,岳志平,等.山区公路平曲线路段动态限速与预警方案[J].公路工程,2012,37(4):1.FANG Yong,LI Zhiyong,YUE Zhiping,et al.Dynamic speed limit and warning program on horizontal curve section of mountain highway[J].Highway Engineering,2012,37(4):1.
[14]王佐,刘建蓓,郭腾峰.公路空间视距计算方法与检测技术[J].长安大学学报:自然科学版,2007,27(6):44.WANG Zuo,LIU Jianpei,GUO Tengfeng.Calculating method and appraising technique of highway 3D-view sight distance[J].Journal of Chang’an University:Natural Science Edition,2007,27(6):44.
[15]彭祖增,孙韫玉.模糊数学及其应用[M].武汉:武汉大学出版社,2002.PENG Zuzeng,SUN Yunyu.Fuzzy maths and application[M].Wuhan:Wuhan University Press,2002.
[16]Gulley N,Jang J S.Fuzzy-logic toolbox[R].Natick:The Math Works Inc,1995.
