基于Matlab建模的永磁同步电机SVPWM控制性能仿真研究
2013-07-26葛东霞
葛东霞
(济南工程职业技术学院,山东济南250200)
0 引言
随着永磁材料的性能和电机制造工艺的迅猛发展,永磁同步电动机在各个领域得到越来越广泛的应用。其中,自起动永磁同步电动机由于损耗少,效率高,运行可靠并能自行起动等优点,应用十分广泛。由于对电机控制[1-3]性能的要求不断提高,建立有效的矢量控制仿真模型一直是永磁同步电机的研究热点[4-7]。
1 自起动永磁同步电动机仿真模型的建立
首先利用坐标变换中的Park方程将三相静止坐标系下的方程转换为两相旋转坐标系下的方程。设转子沿逆时针旋转,取永磁体基波磁场轴线方向为d轴,q轴超前d轴90°,转子参考坐标的旋转速度为转子速度,θr为q轴与固定轴线间的电角度。电动机定子为星形连接。自起动永磁同步电动机的Park方程为:
电压方程
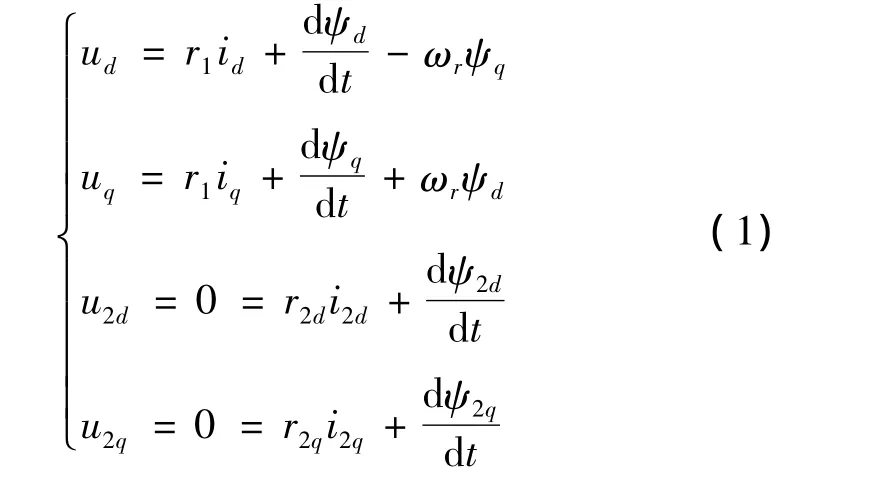
式中:ωr为电机转子电角度;r1为定子绕组相电阻;r2d为转子直轴电阻;r2q为转子交轴电阻。
磁链方程
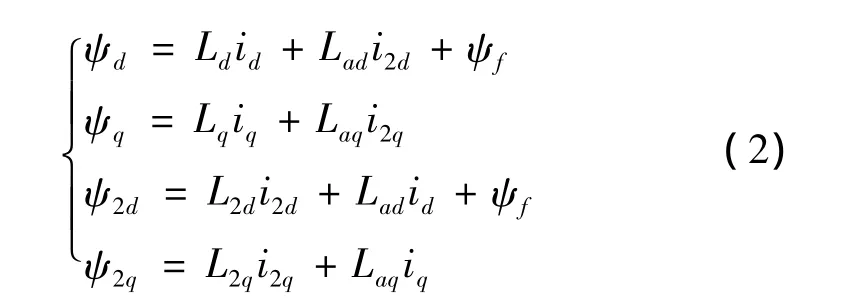
式中:Ld,Lq为定子直轴和交轴电感;L2d,L2q为转子直轴和交轴电感;Lad,Laq为定转子之间直轴和交轴互感;ψf为永磁体产生的磁链。
不计铁耗和附加损耗的情况下,机械运动方程

式中:J为转子和负载转动惯量之和;p为电机极对数;Tem为电磁转矩;TL为负载转矩[8-10]。
2 矢量控制系统模型的建立
在分析PMSM数学模型的基础上,建立了基于SVPWM的PMSM控制系统仿真模型。在Matlab中通过编写S-function函数文件构造新模型。在模型连接过程中,使用了电气系统模块(PSB)和常规的Matlab仿真元件库里有现成的永磁同步电机仿真模型。把电动机的三相定子电流分解成励磁电流分量和转矩电流分量,使这两个分量相互垂直,再分别调节,SVPWM的技术就是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波。以所形成的实际磁链矢量来追踪其准确磁链圆,从而在电动机空间形成圆形旋转磁场,产生恒定的电磁转矩,最终实现对 id、iq独立解耦控制[11-13]。
在系统中,经测量得到永磁同步电机三相定子电流ia、ib、ic,经过坐标变换模块转换为实际直轴电流id和实际交轴电流iq。实际转速与给定转速比较后经过控制器得到参考交轴电流。id、iq分别和参考直轴电流与参考交轴电流比较后经过电流调节器生成直轴电压Ud和交轴电压Uq,再经过矢量控制模块、SVPWM模块生成6路触发脉冲。驱动逆变器模块生成三相电压,控制永磁同步电机运行[14-15]。
控制系统整体方案的转速环由PI调节器组成,电流环由电流滞环控制器构成。下面主要介绍坐标变换模块、矢量作用时间计算模块、扇区选择模块和采用三矢量合成磁通法的SVPWM模块。其结构如图1所示。
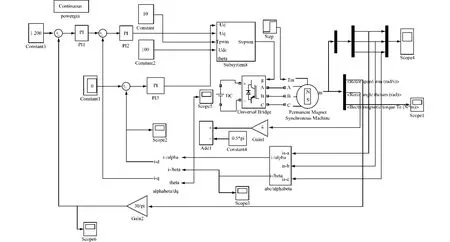
图1 控制系仿真整体模型
矢量控制中用到的坐标变换有:Clarke变换和Park变换的变换矩阵的Matlab实现如图2和图3所示。矢量作用时间计算模块如图4所示。
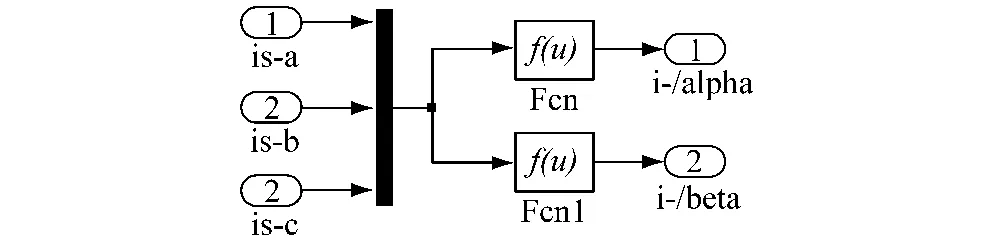
图2 Clarke变换模块
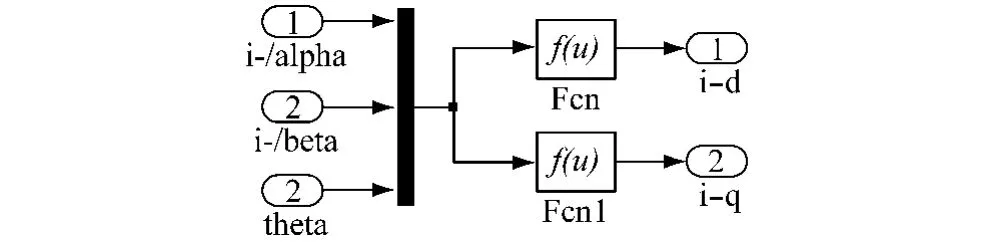
图3 Park变换模块
仿真中所使用得SVPWM模块主要由基本电压矢量的作用模块如图4和扇区选择模块如图5等。将上述模块连接生成SVPWM整体模型如图6所示。

图4 矢量作用时间计算模块
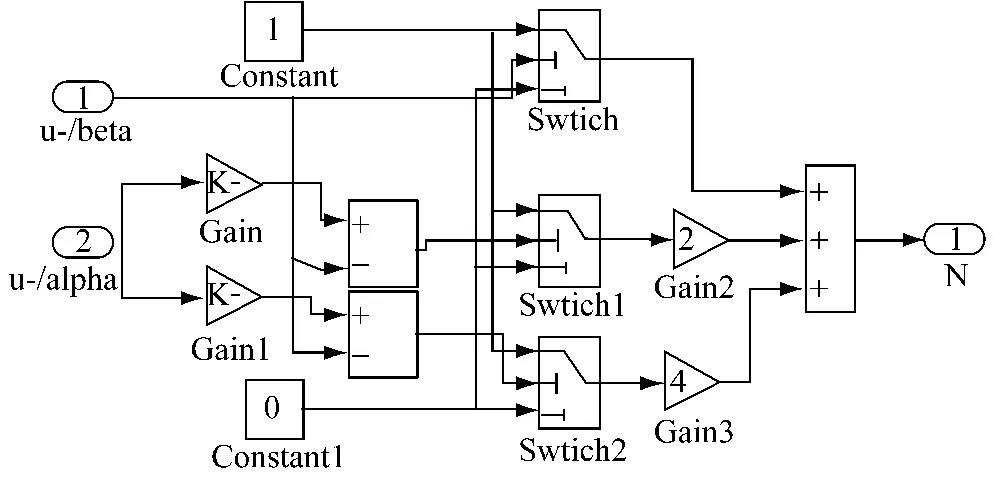
图5 扇区选择模块
3 仿真结果
根据电机模型和矢量控制原理的分析,建立了PMSM控制系统基于SPWM的矢量控制仿真模型,在Matlab/Simlink环境下进行仿真。电机参数设定为:电机功率P=2 kW,直流电压Udc=400 V,定子绕组电阻R=2.875 Ω,定子 d相绕组电感 Ld=8.5 mH,q相绕组电感 Lq=8.5 mH,转子磁场磁通 λ=0.175 Wb,粘滞摩擦系数B=0.001 147 N·m·s,转动惯量 J=0.008 kg·m2,额定转速 nN=1 500 r/min,极对数p=4。为了验证所设计的PMSM仿真模型的静、动态性能,设定仿真总时间为0.2 s,系统在t=0 s时负载转矩TL=1 N·m起动,在t=0.1 s时TL=2 N·m。分别得到了控制系统性能如下:定子三相电流变化仿真曲线如图7所示,电机转矩变化仿真曲线如图8所示。转速变化仿真曲线如图9所示。改变给定输入转速分别为900、1 000和1 200 r/min,电机都能够稳定运行,能够控制系统具有较好的动态稳定性。
由仿真结果可看出,在额定转速nN=1 500 r/min的参考转速下,系统带负载起动响应速度快,稳态运行时转速稳定,定子三相电流和电磁转矩在电机启动阶段波动较大,但迅速稳定在给定额定值。综上所述,本文设计的控制系统可以稳定运行,并且具有良好的静态和动态性能。
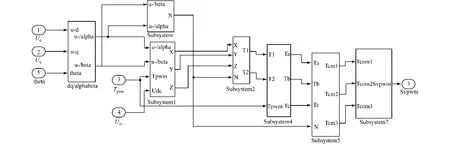
图6 SVPWM控制波形产生模型
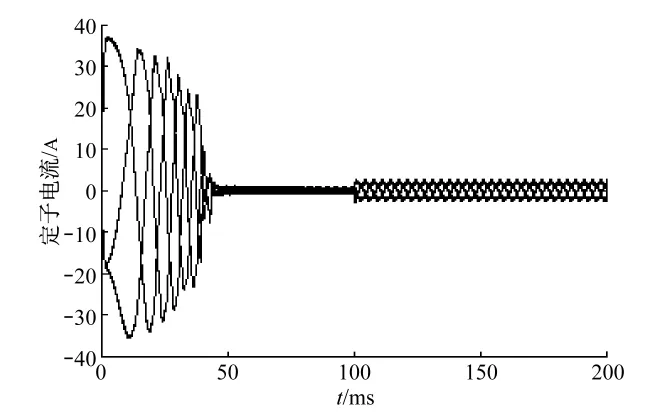
图7 定子三相电流变化仿真曲线
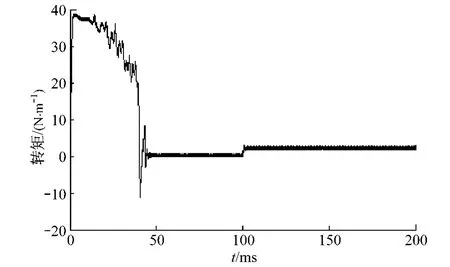
图8 电机转矩变化仿真曲线
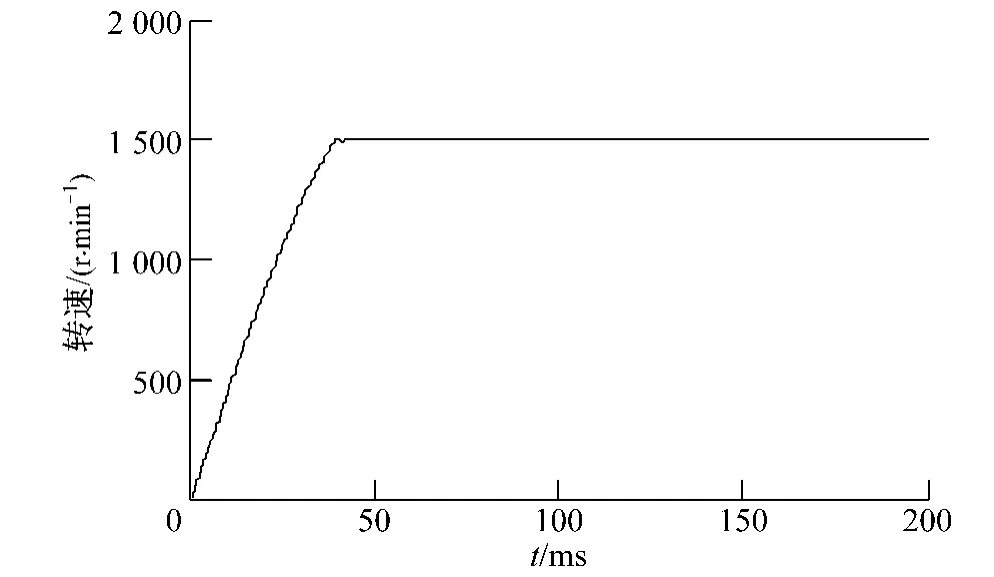
图9 转速变化仿真曲线
4 结语
本文首先在分析PMSM数学模型和SVPWM控制原理的基础上,运用数学建模软件Matlab/Simulink,建立了基于SVPWM的永磁同步电机矢量控制系统的仿真模型,通过仿真结果可以看到系统运行平稳,具有良好的动态和静态性能,得到的仿真结果符合理论分析。采用该PMSM矢量控制系统仿真模型,可以验证控制算法的正确性,而且所建立的模型通用性强,根据控制要求的需要,改变相应模块的参数,是分析和设计PMSM控制系统的有力手段。
[1] 陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2009.
[2] 汤蕴酋,史 乃.电机学[M].4版.北京:机械工业出版社,2001.
[3] 李永东.交流电机数字控制系统[M].北京:机械工业出版社,2003.
[4] 寇宝泉.交流伺服电机及其控制[M].北京:机械工业出版社,2008.
[5] 陈 荣.永磁同步电机控制系统[M].北京:中国水利水电出版社,2009.
[6] 马小亮.大功率交-交变频调速及矢量控制技术[M].北京:机械工业出版社,2004.
[7] 刘凤春,孙建忠,牟宪民.电机与拖动MATLAB仿真与学习指导[M].北京:机械工业出版社,2008.
[8] 张 池.永磁同步电机模糊控制方法研究[J].武汉工业学院学报,2011,3(1):63-66+78.
[9] 林 海,李 宏,林 洋,等.永磁同步电机矢量控制系统仿真与建模研究[J].微特电机,2006(8):43-45.
[10] 孙业树,周新云,李正明.空间矢量PWM的SIMULINK仿真[J].农机化研究,2003,2(2):105-106.
[11] 徐艳平,钟彦儒.基于空间矢量PWM的新型直接转矩控制系统仿真[J].系统仿真学报,2007,19(2):344-347.
[12] 常 发,冯旭刚,胡雪峰.永磁同步电动机的动态神经网络SVPWM控制[J].安徽工业大学学报(自然科学版),2010,27(3):289-294.
[13] 余名俊,李 岚,王秀丽.异步电动机的MATLAB建模与仿真[J].微电机,2006,39(6):35-37.
[14] 沈天珉,胡育文,郝振洋,等.基于电压调制的永磁容错电机转矩控制系统仿真[J].微特电机,2011,39(3):66-68+72.
[15] Bon-Gwan Gu、Kwanghee Nam,A Vector Control Seheme for a PM LinearSynchronous Motorin Extended Region[J].IEEE Transactions on Industry Applications,2003,39:1280-1287.
