主动模拟肺平台的设计和研究
2013-07-26刘晓梅许琳媛魏立峰陈少纯
刘晓梅 许琳媛 魏立峰 陈少纯
(沈阳化工大学信息工程学院,辽宁 沈阳 110142)
0 引言
随着医疗器械产业的迅速壮大,呼吸机越来越普遍地应用于临床抢救、麻醉、呼吸衰竭及手术后的支持治疗中。为了防止呼吸机失准、故障等隐患对患者生命构成的威胁[1],需要使用模拟肺对呼吸机进行定期检测。
目前常用于呼吸机检测的模拟肺大多是被动的,无法模拟患者的自主呼吸。国外仅有的一款主动模拟肺ASL5000通过上位机软件控制,存在全英文操作界面使用不便、功能复杂、价格昂贵等缺点;国内有关模拟肺的研究还停留在初级阶段,多以气阻和顺应性作为模拟参数,算法复杂。因此,在呼吸机性能的综合测试中急需一种新型的主动模拟肺,以弥补上述不足[2]。
本文通过直线电机搭建主动模拟肺平台,设计运动控制器,并通过设置呼吸频率、潮气量等参数,模拟人体呼吸,测量呼吸流量、压力等呼吸力学参数。该平台具有算法简单、使用方便、价格相对低廉、精准度高、易普及等优点,可以为呼吸机提供较为全面的综合测试,并判断呼吸机是否失准、是否能用于病人,提高了设备使用率[3];同时,其也可作为临床医学研究的模拟设备。
1 系统总体方案设计
系统主要由机械运动和控制采集两部分组成。系统总体方案设计如图1所示。
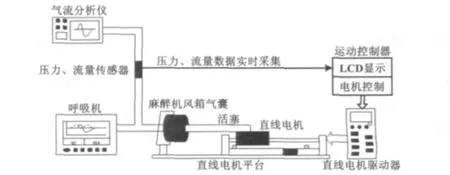
图1 系统总体方案设计Fig.1 Design of the overall systematic scheme
机械运动部分由直线电机、活塞、麻醉机风箱气囊组成,直线电机带动麻醉机风箱气囊、活塞做往复运动,模拟人体肺部的呼吸过程[4]。系统选用 Servo Shaft公司的3210直线电机。该电机能将电能直接转换成直线运动的机械能,不需要任何中间转换机构,消除了传统机械传动链中间环节所带来的一系列不良影响。同时直线电机还具有磨损小、噪声低、速度快、精度高等特点,较传统步进电机加滚珠丝杆有更好的性能和可靠性[5]。
控制采集部分由压力传感器、流量传感器、直线电机驱动器和运动控制器构成,主要完成直线电机运动控制以及压力、流量数据的实时采集和显示。
2 运动控制器硬件设计
运动控制器的硬件部分主要包括ARM lm3s1138主机电路、按键、LCD显示电路、信号调理电路及直线电机控制电路等几部分。运动控制器结构框图如图2所示。

图2 运动控制器结构框图Fig.2 Structural block diagram of the motion controller
ARM lm3s1138是基于ARM®CortexTM-M3的控制器。ARM®CortexTM-M3是一个满足低功耗、高性能、低成本的内核,它提供了出色的计算性能和优越的系统中断响应能力。芯片集成了8通道10位的ADC模拟比较器,满足信号采集要求;3个完全可编程的UART、2个I2C模块、4个定时器和46个通用 I/O引脚,满足本设计需求。
2.1 信号调理电路
MPXV5004G系列气体压力传感器是FreeScale公司生产的硅压阻传感器。该系列传感器中的差压型气体压力传感器测量范围为0~3.92 kPa,输出信号为1~4.9 V直流信号。
FS1002UN型流量传感器是矽翔微机电系统有限公司生产的MEMS流量传感器,量程范围为0~200 L/min,响应时间为 12 ms,精度为 ±1.5%,输出信号为0.5~4.5 V直流信号。
信号调理电路如图3所示。模拟信号的采集使用微控制器的A/D变换器。由于压力、流量传感器的输出信号分别为1~4.9 V和0.5~4.5 V的电压直流信号,而微控制器的A/D转换器最大模拟输入电压为3 V,因此需要对传感器输出信号进行调理和适当的滤波,以满足使用要求。
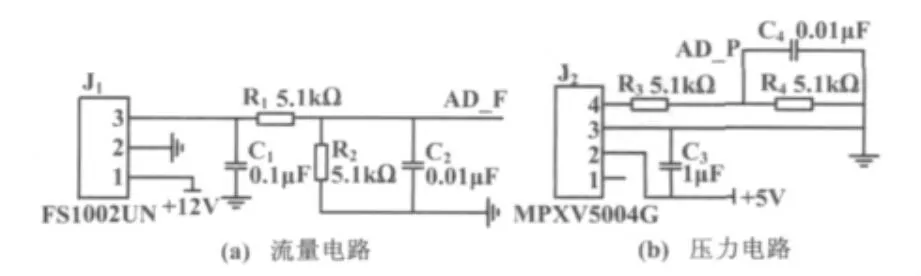
图3 信号调理电路Fig.3 Signal conditioning circuit
2.2 直线电机控制电路
直线电机控制电路如图4所示。直线电机控制电路采用光电耦合的控制方式,其主要优点是:信号单向传输,输入端与输出端完全实现了电气隔离,抗干扰能力强,工作稳定,传输效率高。
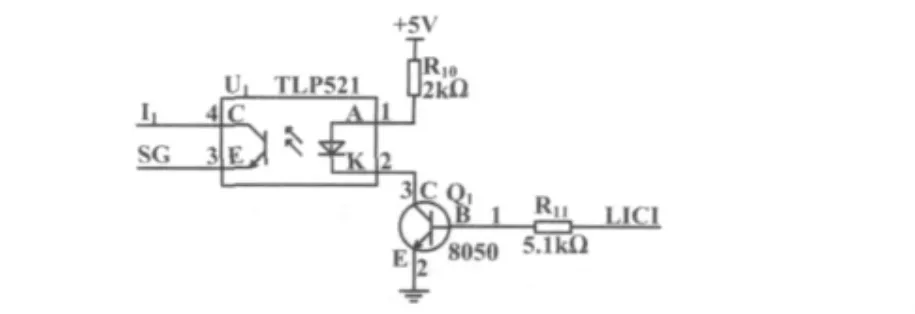
图4 直线电机控制电路Fig.4 Control circuitry of the linear motor
3 运动控制器算法设计
3.1 呼吸参数设计
呼吸频率(respiratory rate,RR)是指每分钟呼吸的次数,设定范围为1~40次/min。
吸气时间(inspiratory time,TI)是指每分钟吸气所占的时间,设定范围为 TI<60/RR-0.5,s;呼气时间(expiratory time,TE)是指每分钟呼气所占的时间,TE=60/RR-TI,s。由此可计算出吸呼比(I∶E)。
潮气量(tidal volume,TV)是指人体平静呼吸时每次吸入或呼出的气量,设定范围为50~1200 mL。此外,潮气量=吸气时间×供气流速,即潮气量与直线电机位移相对应,直线电机位移=控制器所发实际脉冲数×0.1 mm。所以首先给直线电机发送不同的脉冲数,通过Certifier FA Plus气流分析仪记录对应的潮气量值;然后在Matlab软件上利用最小二乘法,可得到潮气量与实际脉冲数的对应关系,由此可计算出实际脉冲数。
呼吸次数(respiratory count,RC)是指触发呼吸的总次数,设定范围为1~+∞。呼吸时间=RC×60/RR。
在运动控制器上对以上四个参数进行设定,从而实现对人体各种呼吸情况的模拟。
3.2 呼吸波形设计
在本设计中,系统通过程序控制脉冲频率的变化。根据不同算法,可模拟方波、梯形波、三角波和正弦波等呼吸波形,也可利用程序延时模拟人体屏气,从而实现不同呼吸波形的模拟。
以模拟一个完整的人体呼吸波形为例,呼吸波形模拟结果如图5所示。
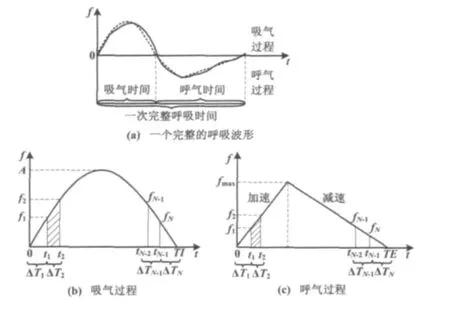
图5 呼吸波形模拟Fig.5 Simulation of the respiratory waveform
图5(a)中实线部分为一名身体健康的男性青年的一个完整的呼吸波形,RR=15 次/min,I∶E=1∶1.5[6]。吸气过程类似于正弦波,呼气过程类似于三角波,所以在程序中吸气过程采用正弦波算法,呼气过程采用三角波算法,如图5(a)虚线部分所示。在运动控制器中设置如下参数:RR=15 次/min、TI=1.6s、TV=500mL、RC=15 次。由此可计算出一次完整呼吸的时间(RT)=60/RR=4 s/次、TE=RT -TI=2.4 s、I∶E=1∶1.5 和实际脉冲数。
吸气过程如图5(b)所示,ΔT时间内发送一个脉冲,直线电机走一步所围成的阴影部分面积为1,则TI内的总面积=脉冲个数N。根据正弦函数公式可递推出每个脉冲所对应的频率值[7]。
呼气过程如图5(c)所示,方法与吸气过程类似,可分为加速和减速两部分计算,由直线函数公式递推出每个脉冲所对应的频率值[8]。
将按上述算法计算出的频率给直线电机发脉冲,既可以实现对呼吸波形的模拟,又满足运动控制器的参数要求。
4 运动控制器软件设计
本文设计的主动模拟肺平台选用mega-fabs公司的D1驱动器。运动控制器控制直线电机运动部分软件流程图如图6所示。
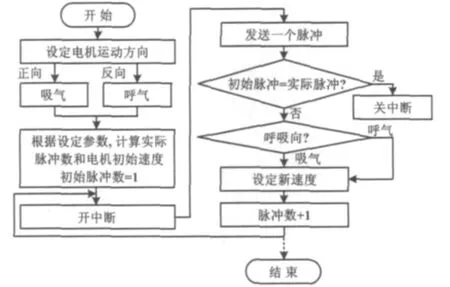
图6 直线电机控制软件流程图Fig.6 Flowchart of the control software for linear motor
吸气时,电机设为正转,初始脉冲数为1,按所需模拟波形计算初始脉冲频率。开中断,直线电机每走一步,脉冲频率按所需模拟波形的算法改变一次,脉冲数加1。当初始脉冲数等于实际脉冲数时,吸气模拟结束。呼气时,电机反转,过程同吸气。
5 测试分析
首先通过Certifier FA Plus气流分析仪对主动模拟肺的模拟准确性进行测试。Certifier FA Plus气流分析仪是美国TSI公司研制的一种理想的检测设备,通过此设备可判断平台设计的准确性。然后,将主动模拟肺平台应用于呼吸机测试。
5.1 参数准确性验证
测试时,将主动模拟肺与Certifier FA Plus气流分析仪相连接。在模拟呼吸过程中,通过Certifier FA Plus气流分析仪记录实际的潮气量和呼吸频率,并将模拟肺的设定值与测量的实际值进行比较,计算出误差。验证结果如表1、表2所示。
潮气量验证表如表1所示,验证分为三组。以第一组为例,在运动控制器上设置RR=30次/min、TI=1 s、RC=25 次,由此可计算出 I∶E=1∶1。然后按照表1中TV的设定值,从50 mL到1000 mL分别对TV进行设置,在气流分析仪上观察对应的实际TV值,并将结果记录于表1中。第二、三组的验证方法同理。由误差分析结果可以看出,潮气量的最大误差为+4.2%,小于潮气量参数的预期设计误差±5%,表明该平台满足测试需求。
呼吸频率验证表如表2所示,验证分为三组。以第一组为例,在运动控制器上设置TV=150 mL、RC=25次,并让 I∶E=1∶1.5;然后按照表 2 中 RR 的设定值,从40次/min到10次/min分别对RR进行设置。根据RR的设定值和吸呼比,可计算出对应的吸气时间并在运动控制器上进行设置,然后在气流分析仪上观察对应的实际RR值,并将结果记录于表2中。第二、三组的验证方法同理。
由误差分析结果可以看出,呼吸频率的最大误差为+1.34%,小于呼吸频率参数的预期设计误差±1.5%,表明该平台满足测试需求。
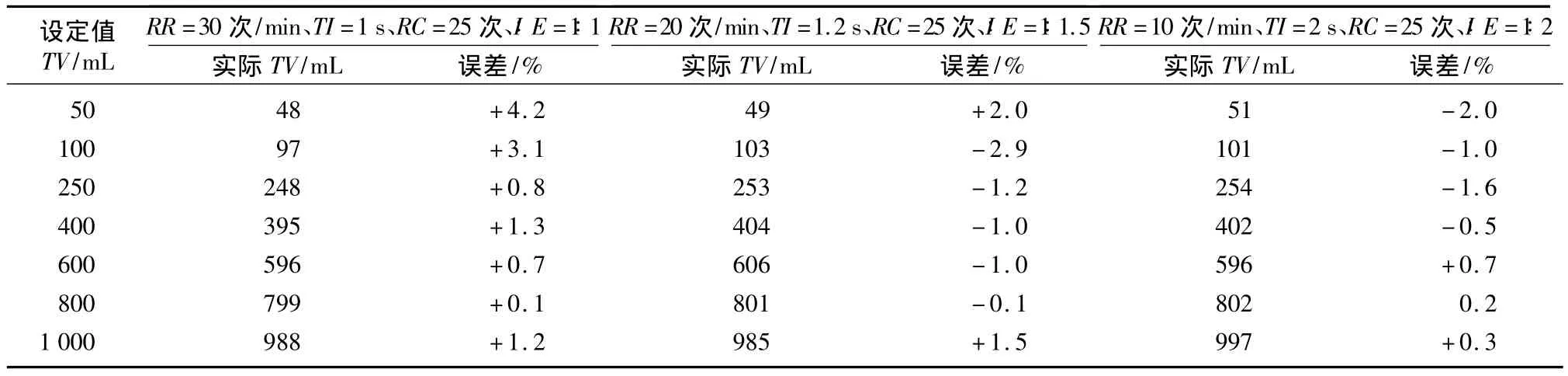
表1 潮气量验证表Tab.1 Verification table of tidal volume
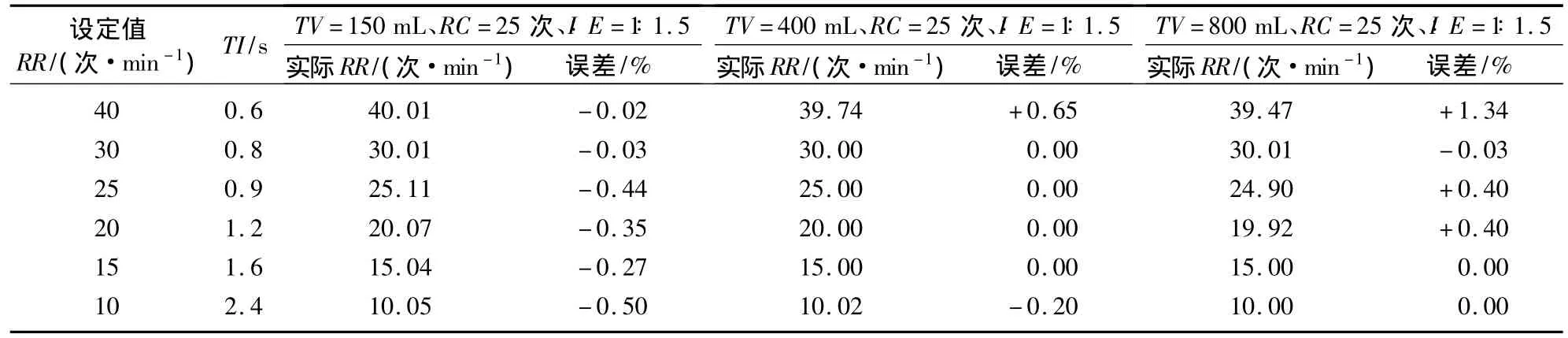
表2 呼吸频率验证表Tab.2 Verification table of respiratory rate
5.2 呼吸机测试
测试时,将主动模拟肺与呼吸机相连,设置呼吸机工作模式为 S模式,吸气压力 =980 Pa、呼气压力=392 Pa、上升时间 =0.3 s,吸气、呼气灵敏度都为自动,升压延时时间=0 min。在程序中吸气过程模拟正弦波,呼气过程模拟三角波,运动控制器设定以下参数:RR=10 次/min、TI=2 s、TV=500 mL、RC=15 次。根据参数可计算出 I∶E=1∶2、每分钟通气量(minute ventilation,MV)=5 L/min,其中,MV= 潮气量(TV)×呼吸频率(RR)。
呼吸机开始通气后,启动主动模拟肺。通过观察发现呼吸机主界面参数和波形都与主动模拟肺设定的参数相一致,证明呼吸机参数准确,可以安全使用。
6 结束语
本文采用直线电机构建模拟人体呼吸的主动模拟肺平台,设计以ARM lm3s1138为主控制芯片的运动控制器,提高了平台的运行速度和模拟精准度,并可以通过控制脉冲频率的变化,模拟各种呼吸波形。
参数准确性测试结果证明,主动模拟肺平台所设定的参数值与实测值近似相等,因此可以利用主动模拟肺平台模拟人体的各种呼吸状况。
所设计的主动模拟肺平台具有较好的实用性、可靠性和良好的可扩展性。针对临床更多呼吸波形和参数计算的需要,还可以对所设计的平台进行更多功能的扩展。
在下一步的研究和设计中,还需要通过建立不同的呼吸模型做进一步验证,并在此基础上进行改进与提高。
[1]吕鹏,陈雅楠,曹德森.呼吸机测试仪的研制[J].北京生物医学工程,2006,25(1):70 -72.
[2]王伟.基于活塞运动的主动模拟肺的研究与设计[D].上海:上海理工大学,2012.
[3]易韦韦,张玘,王跃科.主动模拟肺ASL5000在呼吸机检测中的应用[J].中国医疗设备,2008,23(7):93 -94.
[4]张坤,徐海琴,徐新民,等.基于主动模拟肺的呼吸机测试系统设计[J].医疗卫生装备,2011,32(4):6 -8.
[5]杜志强,黄桂琴,朱德荣,等.直线电机驱动系统及应用[J].洛阳理工学院学报:自然科学版,2009,19(4):35-38.
[6]李钊,王健琪,荆西京,等.用于生命探测的人体呼吸运动模拟系统研制[J].医疗卫生装备,2010,31(3):40 -41.
[7]张艳敏,罗海兵.基于ARM芯片的步进电机加减速控制[J].河北工程技术高等专科学校学报,2009(2):47-49.
[8]钱国维,张凌.一种步进电动机运行曲线的在线计算方法[J].微电机,1997,30(2):28 -31.