改进的道路背景提取与更新算法
2013-07-25杨孟拓刘雪琴宋焕生李文敏
李 洁,杨孟拓,刘雪琴,宋焕生,李文敏
(长安大学 信息学院,陕西 西安 710064)
目前常用的基于视频的目标检测算法主要有3种:光流法[1-3],帧间差法[4-5],背景差法[6-7]。由于光流法计算量较大,因此在实际中不经常使用;帧间差法能够适应快速变化的环境,但检测出的运动目标位置不够精确。背景差法实现简单,程序复杂性低,能保持目标的完整性,因此得到了广泛的应用[8]。所以,如何提取出准确的背景至关重要。
迄今为止,国内外诸多专家已经提出了很多算法。比如多帧图像平均法,就是把一段时间内图像序列进行累加,然后再平均得到近似的背景图像,该算法实现简单,计算量较小,但是对于车流量较大的路段,该方法很容易把前景目标混入背景里,提取的效果不甚理想。Gloyer B[9]提出的中值滤波法,在背景像素出现概率较大时,提取的效果很好,但是在背景像素出现概率较小时,该算法就会失效。Friedmand等人提出了单高斯模型[10],即分别获得背景、前景和阴影的高斯分布,并将这3个高斯分布的加权值作为像素的灰度值,然后通过EM算法获得模型参数,但是一般情况下背景都是比较复杂的,所以对背景仅采用一个高斯分布是不够的。因而提出了混合高斯模型[11-12],它是一种自适应的背景建模方法,其核心思想是为每一个像素点建立多个随时间变换的高斯统计模型,但也存在一些缺点:背景模型的收敛速度慢;对光照变化敏感。Surendra[13]算法的原理是把当前帧中的像素点分为前景点和背景点两类。当前帧的背景点的像素值与背景图中的对应点加权平均,作为当前背景中像素值。前景点处则保持原来背景值不变。该算法的核心在于通过直方图统计和经验取值而区分当前帧中的前景点和背景点,但是此算法在前景物体较多,情况复杂时会引入噪声。
在复杂的道路场景,以上方法还是不能消除一些光照及噪声的影响,不能够满足实际的要求。为此,本文提出了一种改进的道路背景提取和更新算法。
1 两种基本背景提取算法
下面介绍两种最常用的背景提取算法,多帧图像平均法和统计中值法。
1.1 多帧平均法
多帧图像平均法的原理是把车辆看作噪声,用累加后进行平均的方法消除噪声,所以可以利用车辆在一段时间内的序列图像求和再平均来得到背景图像。计算公式如下

式中:imagei(x,y)表示第i帧(x,y)点处的像素值,Background(x,y)表示点(x,y)的背景图像,N表示平均帧数。
该算法的特点是计算比较简便。但是发现通过平均法得到的背景图像往往会出现亮度分布不均的现象。这是由于在车流量较大的情况下,该算法会将车辆信息误认为是背景信息,而随着平均帧数的增加,背景的可信度也会增加。由于在实际生活中交通状况是比较复杂的,因此多帧图像平均算法显然不能有效地满足复杂环境的需求。
1.2 统计中值法
统计中值法是一种能有效抑制噪声的处理技术。统计中值法较平均法的优点是它可以克服均值滤波给图像造成的模糊影响,而且在抑制噪声的同时,能保持良好的边缘性,进而获得较为满意的背景。
统计中值法的基本思想是先统计一段时间内某一个像素点的值,然后用这些值的中值作为背景像素。
2 本文算法介绍
分析以上的算法,它们对于比较复杂的场景都有一定的局限性,得出的结果并不令人满意,所以,本文提出了一种新的算法,它克服了场景复杂时道路背景提取困难或者提取结果失真的弊端,能在较短的时间内提取出准确性较高的背景,而且能够消除光照和噪声对于背景的影响,为后续的车辆检测提供了很好的基础。
下文介绍算法的基本思想及具体步骤:
1)图像分块
由于单个像素所代表的信息量比较少,而且很容易受到噪声的干扰,所以把图像分成一个个小块来处理,每个小块包含h×w个像素,这样不仅能够结合周围区域的信息,而且能够抑制噪声的影响。
分块后的图像大小记为

式中:row和col分别代表分块后行的块数和列的块数;H和W分别代表原图像列像素和行像素;h和w分别代表每一块的列像素和行像素。
2)图像拉伸
对于天气情况比较恶劣的视频,如果直接处理,难度比较大,而且准确性不高,所以先对原始图像进行拉伸处理,提高图像的对比度,方便以后的处理。
处理的表达式如下
式中:CurrentFrame(x,y)表示当前帧(x,y)点处的像素值;min和max分别为拉伸的下界和上界,处理结果如图1所示。
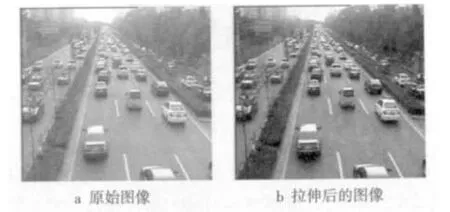
图1 拉伸对比图
3)对于拉伸图像后的每一块,都进行以下运算

式中:PreFrame(x,y)表示前一帧(x,y)点处的像素值。记录此时的bloVal(t),按需要本文记录离当前帧最近的N帧。
4)然后根据以下公式判断

式中:Th为阈值,Counter(p,q)表示块(p,q)计数器值。在bloVal(t)大于等于Th的情况下,进行快慢变化的判断,如果为慢变,Counter(p,q)++;如果为快变,则Counter(p,q)=0。
下面介绍具体快慢变化的判断准则:
因为单纯按照一个阈值的大小就决定计数器的值,具有一定的局限性,可能因为一些光照的变化而影响结果的准确性,所以要区分是车辆的影响还是光照的影响(见图2),具体的实现步骤如下:
(1)计算历史bloVal(t)的均值和方差,公式为
(2)如果当前的bloVal(t)超过了阈值Th,但是它所对应的历史均值和方差满足以下公式

式中:λ〉0,一般λ=3,base=20。满足公式则表示该块是慢变(光照变化)引起的,否则是快变(车辆经过)引起的。
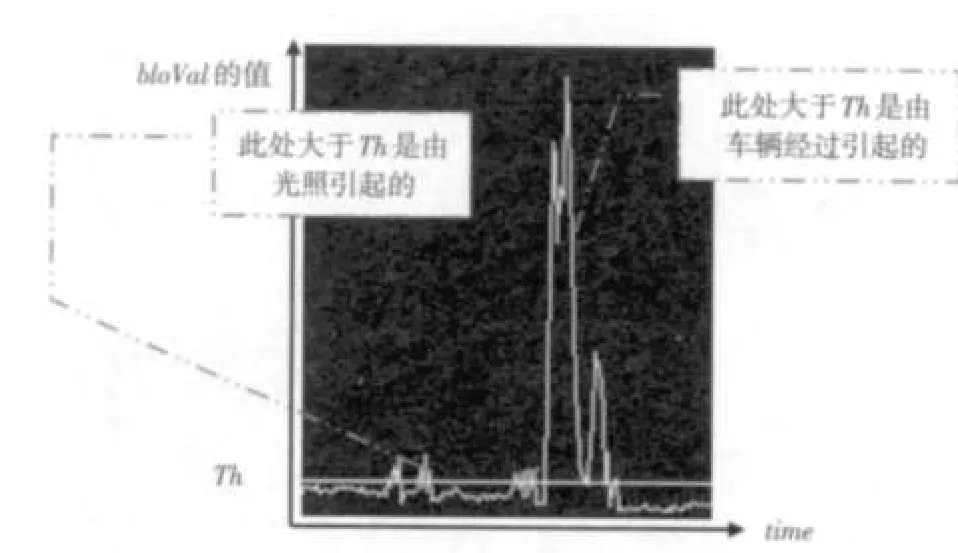
图2 块(p,q)的bloVal(t)值的变化
5)重复步骤3)和步骤4),直到Counter(p,q)达到一定的阈值Ths时,保存此时bloVal(t)的值作为一个参考状态,本文保存距离当前帧最近的两个参考状态,离当前帧比较近的一个记录为bloValL(s),比较远的一个记录为bloValF(t),如图3所示。
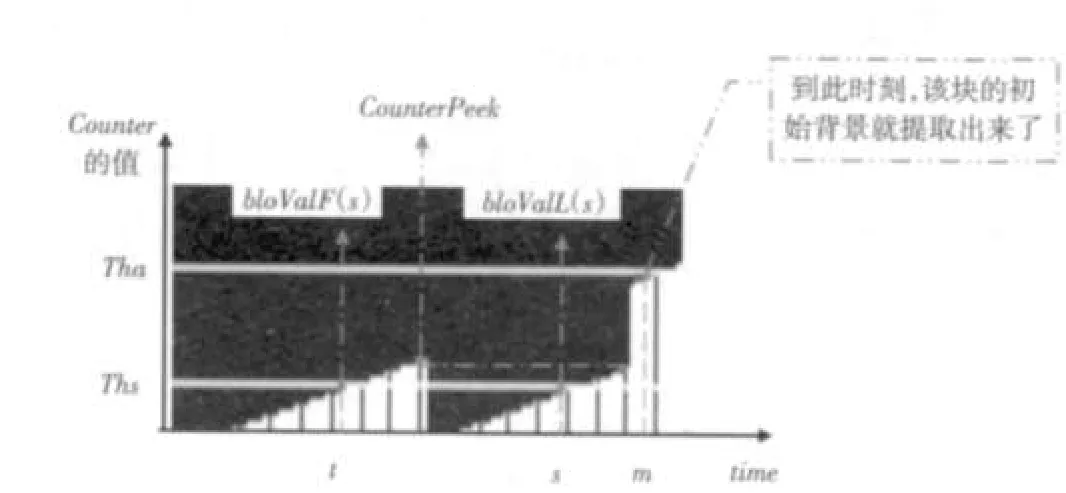
图3 块(p,q)计数器值的变化过程
6)判断Counter(p,q)是否大于Ths,如果大于,并且满足

则令

式中:CounterPeek(p,q)为块(p,q)历史最大值,Thb为阈值。否则重复步骤3)、步骤4)和步骤5)继续进行判断。
7)当Counter(p,q)的值首次大于阈值Tha(Tha〉Ths),则将此块当前帧的灰度值保存为初始背景,如图3所示,表达式为
如果Counter(p,q)的值不是首次大于阈值Tha,则转到下一步骤执行。
8)按照加权系数法对该块背景进行实时更新,表达式为
式中:α为权系数,0〈α〈1。
3 实验结果及分析
本文给出了两种不同的场景对本文的算法进行验证,并与其他背景提取算法进行比较。第一种场景摄于西安市南二环,时间为下午,图像较为清晰,但是车流量大,有光照的影响。第二种场景摄于上海市申江高速公路,时间为晚上,图像质量比较差,光线弱,并且有路灯和车灯的影响。
在第一种场景中(见图4),均值法提取的背景出现了大面积的失真,与实际路面的像素值相差较大;统计中值法对于近景部分的背景基本满足要求,但是远景部分(圆圈所标记的范围)和实际背景不符;本文算法不管是在近景部分还是远景部分,都能提取出较为准确的背景。
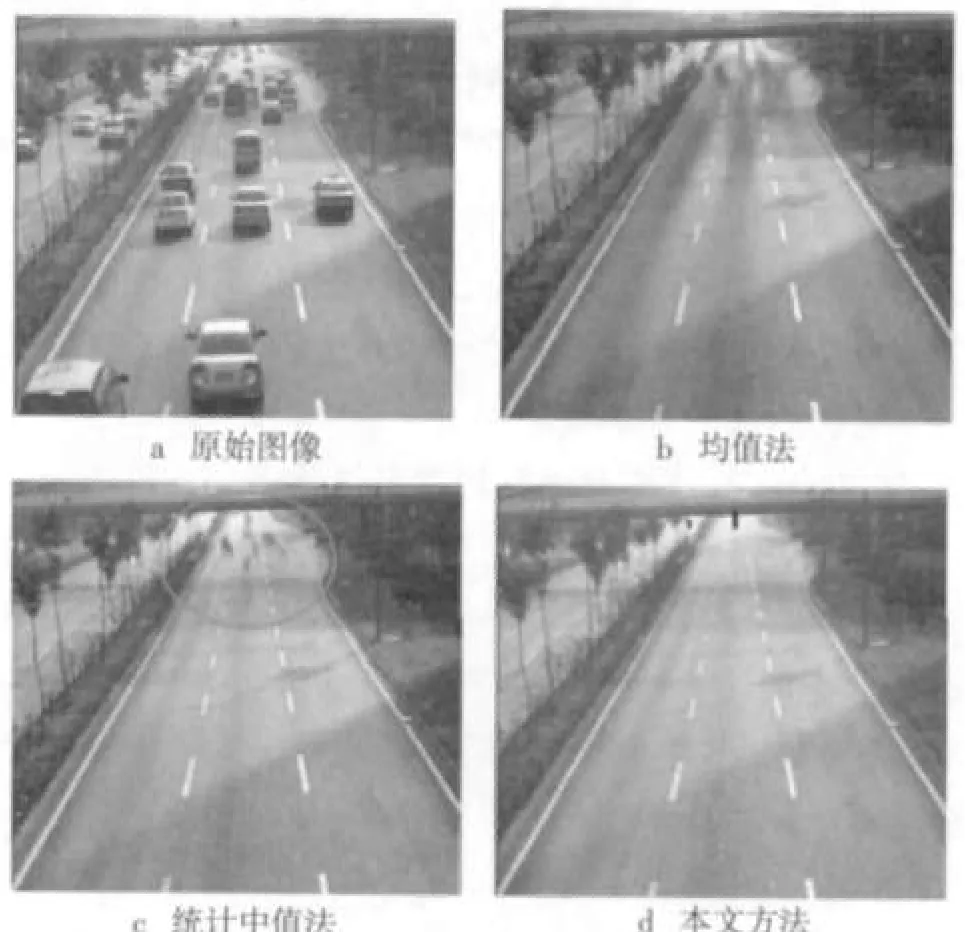
图4 场景一算法比较
在第二中场景中(见图5),由于图像质量的原因,从图中似乎不能明显地看出各种算法提取出的背景有什么不同,鉴于此,这里同时给出了车辆检测的结果,以便于观察对比。均值法检测出的二值图像上方出现了很多干扰,这是由于灯光或者车灯的影响造成的;统计中值法在二值图像上方出现的干扰有所减少,但是出现了一些噪声点不能消除;本文的算法能够消除灯光以及噪声的影响,准确地检测出车辆,提取效果较为理想。
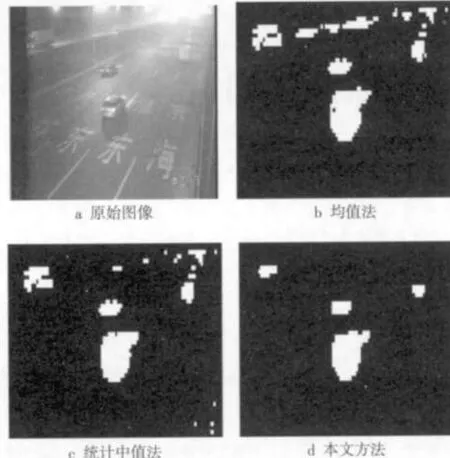
图5 场景二算法比较
4 总结
对于场景复杂的道路,提取背景相对比较困难,本文通过统计相邻帧的变化情况,得到持续不变区域的特征,再针对这些特征进行分析比较,最后将状态相近的区域进行累加,并通过实时更新得到最终的背景。实验表明,该算法能够克服场景复杂时提取背景失真的弊端,并且能够很好地消除光照和噪声的干扰,为后续的车辆检测提供了可靠的依据。
[1] ENKELMANN W.Investigation of multigrid algorithms for the estimation of optical flow fields in image seauences[J].Computer Vision,Graphics and Image Processing,1998(43):150-177.
[2] LIU Y,HUANG T S.Determing straight line correspondences from intensity images[J].Pattern Recongnition,1991,24(6):489-504.
[3] 王新余,张桂林.基于光流的运动目标实时检测方法研究[J].计算机工程与应用,2004(1):43-46.
[4] WANG Junwei,WANG Dingwei.Particle swarm optimization with a leader and followers[J].Progress in Natural Science,2008,18(11):1437-1443.
[5] LONG W,YANG Y.Stationary background generation:an alternative to the difference of two images[J].Pattern Recognition,1990,23(12):1351-1359.
[6] 李志勇,沈振康,杨卫平,等.动态图像分析[M].北京:国防工业出版社,1999.
[7] 朱秋煜,李琦铭,陈岳川.基于视差和帧差的图割优化运动目标分割算法[J].电视技术,2012,36(13):135-139.
[8] LUCAS B,KANADE T.An iterative image registration technique with an application to stereo vision[EB/OL].[2012-08-20].http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.49.2019.
[9]GLOYER B,AGHAIAN H K,SIU K Y,et al.Vehicle detection and tracking for freeway traffic monitoring[C]//Proc.1994 Conference Record of the Twenty-Eighth Asilomar Conference on Signals,Systems and Computers.Pacific Grove,CA:[s.n.],1994:970-974.
[10] FRIEDMAN N,RUSSELL S.Image segmentation in video sequences:A probabilistic approach[EB/OL].[2012-08-20].http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.38.7356.
[11] STAUFFER C,GRIMSON W E L.Adaptive background mixture models for real-time tracking[J].The Artificial Intelligence Laboratory Massachusetts Institute of Technology,1999(2):246-252.
[12] 王源,陈亚军.基于高斯混合模型的EM学习算法[J].山西师范大学学报:自然科学版,2005,19(1):46-49.
[13] 吴众山,雷蕴奇,吴绿芳,等.一种实用的背景提取与更新算法[J].厦门大学学报,2008,47(3):348-352.
