机载光电吊舱目标定位技术研究
2013-07-25高卓,江泽,邓麟
高 卓,江 泽,邓 麟
(中国航天科技集团16所,西安 710100)
1 引言
机载光电吊舱是集可见光摄像机、红外热像仪、激光测距仪等高精度测量设备于一体,用于实现航空侦察、目标瞄准、跟踪、定位等功能的全天候电子侦察设备,它通常安装于有人或无人飞机,在航空测量、对敌侦察、目标跟踪及民用航空等领域有着重要的应用价值[1]。
随着机载光电吊舱功能指标和技术指标的进步,在航空侦察测量中,不再满足于得到目标物体在光电吊舱视场中的方位信息 (方位角、俯仰角、距离),而是进一步得到目标物体在大地坐标系下的大地坐标 (纬度、经度、高度),再将目标在既定的电子地图上标定出来[2-3],方便对目标及其周围环境进行分析和监视;对目标物体定位精度的高低直接影响目标状态参数的评估和战场形势的分析,因此提高目标定位精度具有非常重要的意义,找出影响定位精度的因素并减小定位误差已成为一个重要课题。
本文主要通过齐次坐标变换得到目标的测量方程,求解出目标的大地坐标,再通过计算机仿真,计算出光电吊舱的测量精度,并对定位模型进行误差分析,为机载光电吊舱研究应用奠定了理论基础。
2 研究现状及发展趋势
我国的机载光电侦察定位技术起步较晚,20世纪80年代末,国内一些单位陆续开展了机载光电吊舱的研制与开发,进入21世纪,机载光电吊舱的需求量大大增加,更多企业和单位先后投入到了机载光电吊舱研究领域,机载光电吊舱性能也大幅得到提升[4]。目前我国已经开始研制微型化的惯导器件和机载超光谱相机,我国的北斗卫星导航系统也在逐渐完善,相信在不远的将来我国在航空侦察测量领域将会达到世界先进水平。
目前机载光电吊舱目标定位领域的主流技术主要有以下三种技术:
(1)空中三角测量法[5-6],即利用全球定位系统 (global positioning system,GPS)动态测量技术实时获取空中摄影位置的空间坐标以及姿态参数,经过后处理获取每张航片的精确外方位元素,同时根据一些少量的外业控制点及数学关系解算出高精度加密点的大地坐标。
(2)目标自主定位技术[7],即将GPS接收机和航空姿态测量系统安装于机载光电吊舱顶部的基准水平面,由机载光电吊舱独自实现目标定位功能的技术。该技术具有去除减震器误差、消除载机安装误差、载机数据同步时间误差及缩短试验周期等特点。本文将针对机载光电吊舱目标自主定位技术进行研究。
(3)图像目标实时定位技术[8],即将GPS定位数据、惯性导航系统 (inertial navigation system,INS)姿态数据以及实时数字影像相融合,应用空间几何以及误差反传对图像目标进行实时三维定位,该技术具有信息获取量大、无源性等优点,是光电吊舱目标定位技术重要的发展方向。
根据现代战争的特点和发展趋势,航空侦察的发展势头强劲,机载光电吊舱必将朝着空间的立体化、信号探测组合化、有效载荷模块化、侦察与打击一体化、提高装备生存能力的方向发展。
3 系统工作原理
3.1 系统组成及工作过程
系统由陀螺稳定平台、航空光电传感器组合、载机GPS定位系统、航空姿态测量系统组成。其中陀螺稳定平台是光电任务载荷的支持服务系统,可将台体与载机角运动隔离,既能够使安装光电任务载荷的台体对地保持稳定不变的方位,又能够控制台体按照指令不受载机运动影响精确灵活地活动;而航空光电传感器组合包括摄像机 (可见光或红外)、视频跟踪仪、激光测距仪、角度传感器等,如图1所示。
机载光电吊舱搜索到地面目标后,将目标锁定在视场中心,输出视轴相对航空姿态测量系统的方位角和俯仰角、航空光电吊舱相对目标的距离信息,同时采集GPS接收机输出的定位数据、航空姿态测量系统输出的载机姿态数据,进行坐标转换,最终算出目标定位数据。

图1 机载光电吊舱目标定位系统组成示意图
3.2 齐次坐标转换目标定位法
机载光电吊舱目标定位过程,原始信息为目标相对机载平台的位置,求取结果为目标物体的大地坐标。原始信息需要经过基座坐标系、载机坐标系、地理坐标系、大地直角坐标系、大地坐标系五个坐标系的齐次坐标转换,最终求取目标物体大地坐标[9],坐标转换流程如图2所示。

图2 定位过程示意图
4 系统定位的坐标转换
4.1 目标定位辅助坐标系
首先建立坐标系统,然后按照各坐标系间的关系建立坐标系转换方程,最后综合各个转换方程得到目标测量方程。
辅助坐标系:
(1)大地坐标系:C(Oc-XcYcZc)
(2)大地直角坐标系:G(Og-XgYgZg)
(3)载机地理坐标系:S(Os-XsYsZs)
(4)载机坐标系:A(Oa-XaYaZa)
(5)基座坐标系:B(Ob-XbYbZb)
4.2 目标定位公式推导
首先对目标相对基座的位置关系进行推导,其表达方式如图3所示,其一是目标在基座坐标系 坐 标 值 (Xb,Yb,Zb),该表示方法常用于齐次坐标转换过程中。其二是目标相对基座的位置关系 (方位角α,俯仰角λ,距离R),该表示方式可以直接通过机载光电吊舱得到。实际上它们代表的目标位置是一致的,但在定位计算过程中需要探讨两者的转换关系。

图3 目标与基座坐标系的关系
由图3可得
(1)基座坐标系转换到载机坐标系
绕Zb轴旋转ΔψBA的转换矩阵M1为
绕Yb轴旋转ΔθBA的转换矩阵M2为

绕Xb轴旋转ΔφBA的转换矩阵M3为
(2)载机坐标系转换到载机地理坐标系:
绕Za轴旋转ψas的转换矩阵M4为

绕Ya轴旋转θas的转换矩阵M5为

绕Xa轴旋转φas的转换矩阵M6为

(3)载机地理坐标系转换到大地直角坐标系沿Xs轴平移h+N的平移矩阵M7为

绕YS轴旋转λs的转换矩阵M8为

绕Zs轴旋转αs的转换矩阵M9为

绕Zs轴平移OgK的平移矩阵M10为

其中,λs、αs、H为载机的大地坐标 (纬度、经度、大地高),N为载机卯酉圈曲率半径

定位过程即已知目标相对基座坐标系的位置(α,λ,R)以及载机大地坐标、姿态角,求解目标大地坐标的过程。

将式 (13)带入式 (14)可得

其中,

设目标的大地坐标为 (B,L,H),将 (Xg,Yg,Zg)带入大地直角坐标系G转换为大地坐标系C的直接公式[5-6]

式中,α为椭球长半轴,b为椭球短半轴,e是第一偏心率,e′是第二偏心率。
5 仿真试验
5.1 蒙特卡罗算法
蒙特卡罗方法即随机模拟方法,也称为随机抽样技术或统计试验方法,是随着计算机技术的发展而快速发展起来的一种研究方法[12]。它利用计算机产生的符合要求的随机数来代替现实难以获取的数据,进而解决所研究的问题。
机载光电吊舱目标定位误差与多种因素有关,包括参数的名义值和其相应的误差。由实际工作中参数模型和概率论知识可知,这些参数的误差大都服从正态分布或近似服从正态分布。因此,假设定位计算的参数误差ΔX分别服从于均值为0,均方差为σΔX的正态分布。

在目标定位分析仿真中,利用MATLAB函数库中的randn()函数可以产生服从标准正态分布的随机数序列X′,经过转换ΔX=σΔXX′便可得到所需的正态分布的随机数序列。
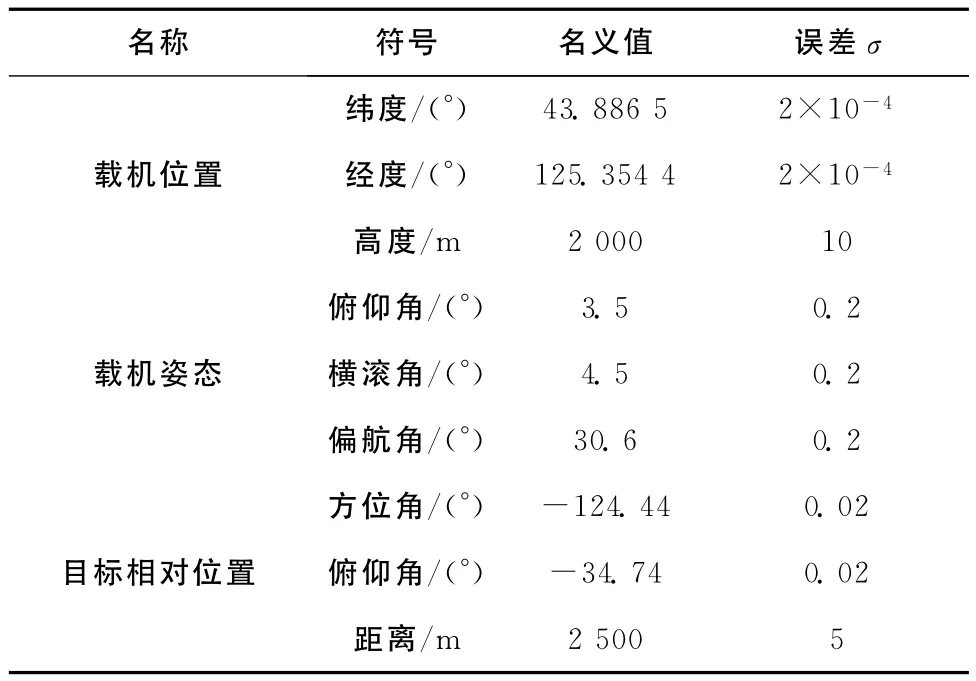
表1 定位仿真计算所采用的数据
5.2 程序设计
根据机载光电吊舱的定位方程以及蒙特卡罗误差模型编写MATLAB误差仿真程序。定位仿真计算所采用的数据见表1,仿真计算流程图如图4所示。

图4 仿真计算流程图
仿真程序计算的具体步骤:
(1)程序启动和初始化;
(2)输入各参数名义值如表1所示,此时误差参数全为0,计算无误差时的定位 结 果 (B,L,H)并 保 存结果;
(3)利用randn()函数生成服从标准正态分布N(0,1)的随机序列X′,长度为1 000;
(4)在随机序列X′中取数,则随机误差量为。用蒙特卡罗法计算加入误差量ΔXi的定位结果(Bi,Li,Hi);
(5)(ΔBi,ΔLi,ΔHi)= (Bi,Li,Hi)- (B,L,H)将上式定位误差循环计算1 000遍;
(6)统计 (ΔBi,ΔLi,ΔHi)的 标 准 差 并输出结果。
根据表1提供的机载光电吊舱数据的名义值和均方误差,建立1 000个随机变量数组的样本模型,通过蒙特卡罗法仿真得出机光电吊舱目标定位精度[13-14]如图5所示。

图5 目标定位经度、纬度、高度误差分布及空间位置分布
5.3 仿真结果
由图5可以看出目标定位的经度、纬度和大地高的误差分布都近似服从μ=0的正态分布;经过数据统计可以发现:采用表1数据计算时目标定位结果的经度误差0.000 249°,纬度误差为0.000 208°,大地高误差13.6m,如表2所示。

表2 采用表1参数的定位结果
5.4 蒙特卡罗误差分析
目标定位系统的误差模型可以利用应用全微分法对系统的数学模型求偏导数推导,但对多变量求偏导是一个繁琐困难,并且无法进行精度计算分析。而蒙特卡罗方法可以模拟误差的随机抽样值,从而模拟一套目标定位误差的样本值,随着样本数量的增加及各个样本相互独立,大量的模拟结果就与实际结果非常接近,且具有很高的置信度。
采用前文推导的数学模型解算地面目标坐标时,其精度主要取决以下误差因素。
1)载机经度、纬度、高度及其误差为

2)载机俯仰角、横滚角、偏航角及误差:(θ,φ,ψ,Δθ,Δφ,Δψ);
3)目标相对载机方位角、俯仰角、距离及其误差:(α,λ,R,Δα,Δλ,ΔR);
由式 (17)可得,参数的误差分布基本服从正态分布,采用表1误差数据进行蒙特卡罗误差分析,得到各参数对定位误差的影响如下。
(1)在其他参数不变的情况下,机载光电吊舱经度值αs由-180°-180°变化过程中目标的经度误差、纬度误差和大地高误差变化很小;机载光电吊舱纬度值λs由-90°-90°变化过程中目标的纬度误差和大地高误差变化很小,但目标经度误差值在飞机平台靠近南北两极时迅速增大,这是因为在南北两极经度分布非常密集;机载光电吊舱大地高程H与机载光电吊舱到目标之间的距离R有直接关系,受到R的影响较大;
(2)机载光电吊舱正常工作时,飞机平台平稳飞行,机载光电吊舱的航向角ψ是影响定位精度的较大因素,俯仰角θ和横滚角φ一般会很小,且变化幅度也不大,对目标自主定位精度影响不大;
(3)目标与机载光电吊舱之间的距离R也是影响定位精度的一个因素,定位误差与距离近似成正比的关系,H对定位误差的影响也与其有关;
(4)目标物体相对机载光电吊舱的方位角α,当经度误差最大值和纬度误差最小值同时出现在α+ψ=kπ(k取整数)附近时,或当经度误差最小值和纬度误差最大值出现在α+ψ=kπ+π/2附近时,在俯仰角λ从10°增大到90°过程中,目标物体的定位经度误差和纬度误差持续增加,而大地高程的误差则在减小。
5.5 提高目标定位精度的的措施
针对以上分析各参数对定位结果的影响,给出提高定位精度的一些措施:
1)采用高精度的测量设备,其中机载光电吊舱姿态角是影响定位精度的最主要因素,因此首先考虑更换高精度航空姿态测量系统,但经济成本也相应提高。
2)在实际应用中,可以考虑对GPS接收机和航空姿态测量系统动态数据进行分析处理,提高GPS接收机和航空姿态测量系统的动态精度,减少飞机飞行过程中的动态误差。
3)对获得实时定位数据做后期处理如卡尔曼滤波处理或小波分析处理,从而得到更好的定位精度。
6 结束语
本文介绍了机载光电吊舱目标定位所采用的齐次坐标转换法;建立了基座坐标系到大地坐标系的辅助坐标系,对目标定位坐标过程进行推导,构建了目标定位坐标转换方程,具有很好的完整性和严密性。在此基础上利用蒙特卡罗思想建立了定位误差模型,并在MATLAB平台上编写了定位计算方程,对目标定位进行了误差分析分析。在日后的工作研究中,动态性能测量方法以及可靠性研究仍需进一步规范化与标准化。
[1]甄云卉,路平.无人机相关技术与发展趋势[J].兵工自动化,2009,28(1):14-16.
[2]常军,佟力.雷达多目标在数字地图下高速显示[J].信息与电子工程,2004,2(2):114-117.
[3]朱耘,韩根甲.无人机光电探测技术的现状及发展趋势[J].舰船科学技术,2004,26(6):51-55.
[4]李文魁,金志华.直升机机载光电吊舱的发展现状及对策[J].中国惯性技术学报,2004,12(5):75-80.
[5]袁修孝.GPS辅助空中三角测量原理及应[M].北京:测绘出版社,2001:29-34.
[6]袁修孝,付建红,楼益栋.基于精密单点定位技术的 GPS辅助空中三角测量[J].测绘学报,36(3):251-255.
[7]刘晶红,孙辉,张葆,等.航空光电成像平台的目标自主定位[J].光学精密工程,2007,15(8):1305-1310.
[8]高希报.图像中几种实用的目标定位方法研究与应用[D].南京:南京理工大学,2005.
[9]王家骐,金光,颜昌翔.机载光电跟踪测量设备的目标定位误差分析[J].光学精密工程,2005,13(2):105-116.
[10]刘建业,曾庆化,赵伟,等.导航系统理论与应用[M].陕西:西北工业大学出版社,2010:32-33.
[11]GROGAN T A,ANGRISANNI D.Coordinate Transformation between Sensor and Observe Vehicle[J].Remote Sensing Review,1992,6(1):33-40.
[12]朱本仁.蒙特卡洛方法引论[M].济南:山东大学出版社,2006.
[13]李英,王绍彬,葛文奇.影响光电平台稳定精度的因素分析[J].长春理工大学学报,2009,32(1):4-7.
[14]费业泰.误差理论与数据处理[M].5版.北京:机械工业出版社,2005.
[15]王晶,高利民,姚俊峰.机载测量平台中的坐标转换误差分析[J].光学精密工程,2009,17(2):388-394.
