卫星导航系统多星座互用定位算法研究(英文)
2013-07-25许承东张鹏飞李社军
宋 丹,许承东,张鹏飞,李社军
(1.北京理工大学 宇航学院,北京 100081;2.中国伽利略卫星导航有限公司,北京 100098)
1 Introduction
The development of GNSS leads interoperability to be the key factor of mutual promotion among systems.
The GNSS interoperability indicates the advantage of using multiple global or territorial navigation systems and their service over using open signal of only one system to achieve better performance for user[1-3].Generally,the interoperability of GNSS refers to the interoperability among GPS,Galileo,GLONASS and BDS (BeiDou navigation satellite system)[1-2].Many researchers hold this view on GNSS multi-constellation interoperability:when the number of visible satellites is saturated for positioning,the further increasing of visible satellites may not improve the positioning accuracy[4-7].Therefore the interoperability among more than three global satellite navigation constellations is a waste of constellation resources sometimes.With the traditional multi-constellation positioning algorithm(positioning algorithm with direct interoperation of multi-constellation,using PADI for short),the above view is beyond doubt because the DOP(dilution of precision)value will not always be decreased with the increasing of visible satellites[8-10].
To solve the problem of less improving of positioning accuracy with increasing of visible satellites,the number of which has already saturated(more than 20),the positioning algorithm with weighted interoperation of multi-constellation (PAWI)is proposed in this paper.Moreover,PAWI can save computing resources by eliminating large dimensional matrix calculations and a lot of coordinate transformations.
This paper is organized as follows:in the second part,PADI is introduced.Meanwhile,the PDOP value and positioning accuracy of PADI are analyzed among different numbers of interoperated constellations.It is confirmed that with the increase of interoperated GNSS constellations,the improvement of positioning accuracy of PADI would slow down gradually.Especially when the PDOP changes little with the increase of the visible satellites,the positioning accuracy will not be improved significantly.PAWI is proposed in the third part.With mathematical simulation,it is illustrated that when the visible satellites number is saturated,the positioning accuracy of PAWI is higher than that of PADI.The forth part is the conclusion.
2 Analysis of Positioning Accuracy with PADI
PADI is the traditional multi-constellation positioning algorithm.The position vector of each visible satellite should be integrated into the same coordinate framework first when positioning with PADI[11-12].Then the pseudorange equation between each visible satellite and the receiver can be constructed.The number of simultaneous equations to position the receiver isn,n=n1+…+ns,wheresis the number of constellations,nsis the number of visible satellites of thesthconstellation.Take the example of positioning with the interoperation of GPS,Galileo and GLONASS to show the process of PADI in Fig.1.
In Fig.1,the position vectors are transformed to WGS84,which is the coordinate frame of GPS.ITRF and PE90is the coordinate frame of Galileo and GLONASS[11].
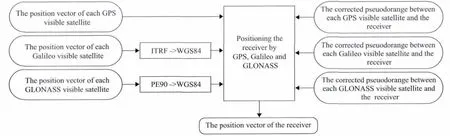
Fig.1 The Process of PADI
The positioning accuracy of PADI is directly related to the PDOP value of visible satellites.PDOP is short for positioning dilution of precision,which is used to measure the positioning accuracy[13].When the PDOP value is less than 3,the positioning is reliable[11].The smaller the PDOP value is,the higher the positioning accuracy will be.However,the decrease of the PDOP value will slow down with the increase of the visible satellites constantly.Moreover,when the number of visible satellites reaches a threshold(more or less than 20),the PDOP value will not change much and the positioning accuracy will not make a big difference.It can be certificated with an example as follows.
Position P is at east longitude of 114°,north latitude of 22°.The elevation angle to judge whether a satellite can be seen is 5°.In the mathematical simulation environment,the PDOP value and the visible satellites number at P are sampled at the interval of 10minutes from 00:00to 24:00.This experiment is among single GPS constellation,two constellations of GPS and Galileo and three constellations of GPS,Galileo and GLONASS.The sampling results are shown in Fig.2.The simulation data is shown statistically in Table1.

Fig.2 The PDOP Values at Point P for One Day
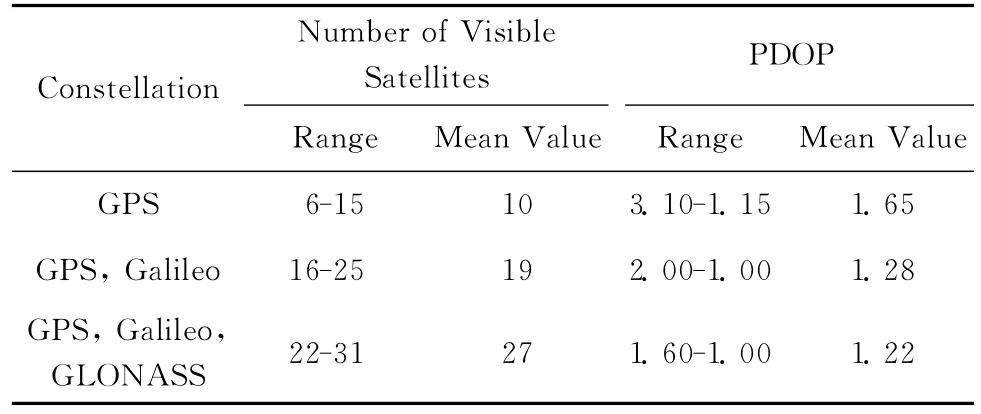
Tab.1 The Range and Mean Value of the Number of Visible Satellites and the PDOP Values at Point P for One Day
According to the data of Tab.1and the curves of Fig.2,it can be summarized that the increasing number of visible satellites from single constellation to two constellations and from two constellations to three constellations is the same,more or less than 10.However,the decline of PDOP value is really different,from 0.38(1.65-1.28)to 0.06(1.28-1.22).And when the visible satellites are enough,more or less than 20,the further addition of visible satellites will not influence the PDOP value apparently.
Position the receiver at Point P at the step of 1s from 7:55to 8:00with PADI in mathematical simulation environment.The positioning error of axis Z is shown in Fig.3.Because the experiment is under mathematical simulation environment,the real position of the receiver is known.The positioning error is the error between the calculated and the real position.The summary of the positioning error is in Tab.2.By analyzing the data in Tab.2and observing the curves of Fig.3,it can be summarized that compare with the single GPS constellation,the positioning accuracy of two constellations is higher no matter[13-14]considering from the mean value,variance or RMS.However,there is little difference between the two constellations of GPS and Galileo and three constellations of GPS,Galileo and GLONASS on positioning accuracy.

Fig.3 The Positioning Error of Each Axis
In this case,the positioning accuracy is lower with larger amount of calculation,positioning with three constellations is much less necessary than two constellations.The increased visible satellites due to the addition of GLONASS constellation are meaningless in terms of improving the positioning accuracy.This example verifies that the positioning accuracy will change little when the visible satellites still increase after reaching the threshold.
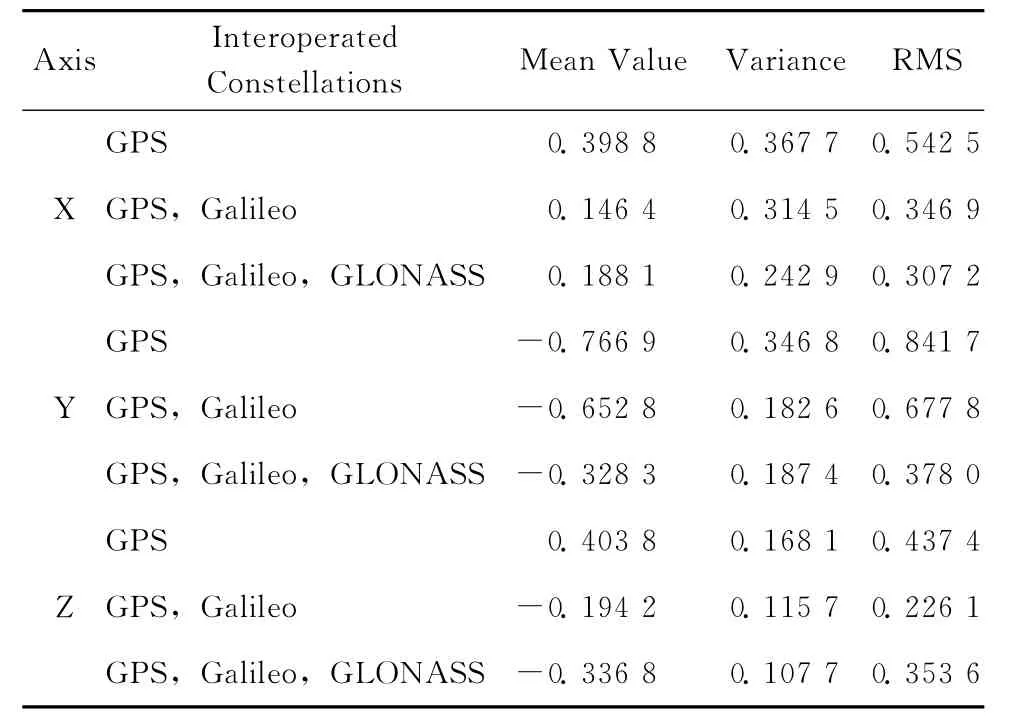
Tab.2 The Statistic Data of Positioning Error for Each Axis/m
3 The Positioning Algorithm with Weighted Interoperation of Multi-constellation(PAWI)
The positioning accuracy is directly related to the PDOP value when positioning with PADI[4].Therefore,when the number of visible satellites has exceeded the threshold,the positioning accuracy cannot be improved by increasing visible satellites.To overcome the difficulty of improving positioning accuracy after the number of the visible satellites reaching the threshold,it’s critical to develop a new algorithm.
Actually,a single global navigation satellite constellation can satisfy the demand for positioning[10-13].Moreover,when the range of visible satellites changes from 6to 12for each single constellation,the PDOP value changes from 2.9to 1.1[12].Therefore the receiver can be positioned with the observation data of each single constellation with low positioning accuracy.Thus PAWI is proposed,which can make full use of visible satellites in each interoperated constellations.
If each single constellation is used for positioning,the number of calculated position vectors of the receiver will bes(the number of interoperated constellations).The final position vector is the results of weighting each calculated position vector by the PDOP value.The method of weighting is as follows:assuming the constellations of interoperation are GPS,Galileo and GLONASS,

Where X is the final position vector of the receiver.XGPS,XGALILEO,XGLONASSare the position vectors which have been unified to WGS84.XGPS,XGALILEO,XGLONASSare obtained from the observation data of GPS,Galileo and GLONASS separately.a1= 1/PDOPGPS,a2= 1/PDOPGALILEO,a3=1/PDOPGLONASS,wherePDOPGPS,PDOPGALILEO,PDOPGLONASSare thePDOPvalues of GPS,Galileo and GLONASS separately.The weights arePDOPvalues of the constellations just because the relative geometry between the constellation and receiver is better for positioning whosePDOPvalue is smaller.
The process for PAWI is as follows:assuming the constellations of interoperation are GPS,Galileo and GLONASS,PAWI can be proved to be effective with the following simulation example:The simulation conditions are the same as the second part.Positioning the receiver at Point P with GPS,Galileo and GLONASS are performed by both PADI and PAWI separately.The positioning error of axis Z is shown in Fig.5.The summary of positioning error of each axis is in Tab.3.It is evident that the positioning error of PAWI is smaller than that of PADI when the visible satellites are saturated.
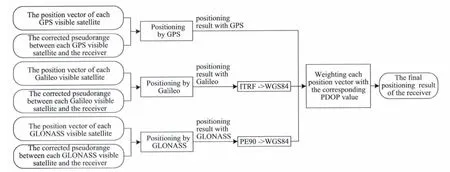
Fig.4 The Process of PAWI
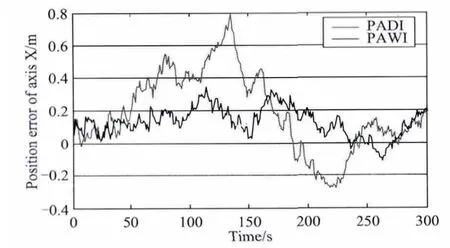
Fig.5 The Positioning Error of Axis X
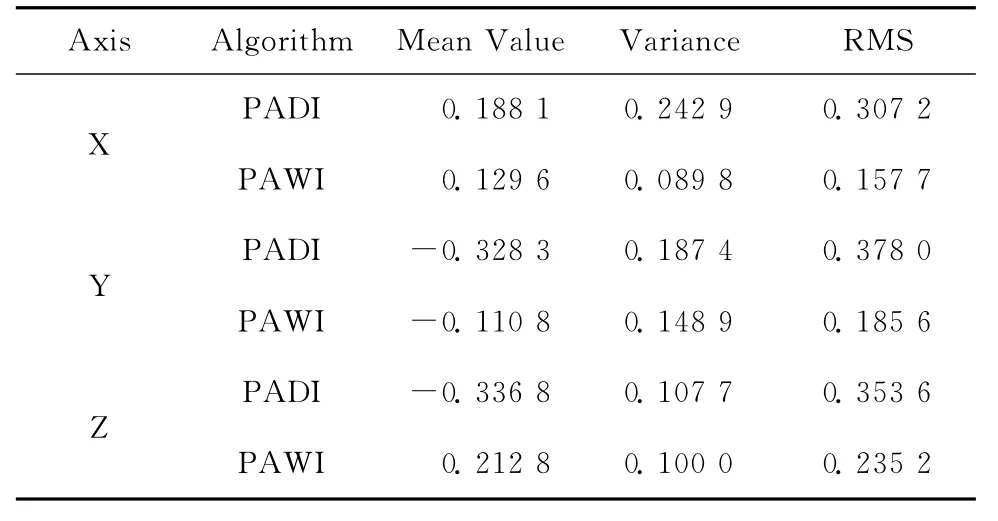
Tab.3 The Statistic Data of Positioning Error for Each Axis
In addition to the positioning accuracy,the efficiency of PAWI is higher than that of PADI.Before positioning,all the position vectors of visible satellites should be transformed into the same coordinate framework if PADI is chosen.However,when using PAWI,only the position vector of the receiver calculated by the observation data from each constellation should be transformed to the same coordinate framework.Therefore considering the computation for coordinate transformation,PAWI is simpler and more convenient than PADI.And the dimension of the matrix in PAWI is much smaller than that in PADI because position with observation data of each constellation can be parallelized and the matrix of each thread owns fewer dimensions.
4 Conclusion
The positioning accuracy of PADI is directly related to the PDOP value of all visible satellites.The smaller the PDOP value is,the higher the positioning accuracy will be.The decline of the PDOP value will slow down with the continuous increase of the visible satellites.Especially,when the number of the visible satellites exceeds the threshold(more or less than 20),the PDOP value changes little,so the positioning accuracy of PADI is not improved.To make full use of the observation data from all the visible satellites,PAWI is proposed:positioning the receiver with the observation data of each constellation and weighting the positioning vectors by the PDOP value of corresponding constellation.When the number of visible satellites has exceeded the threshold,the positioning accuracy can still be improved with the further increasing of visible satellites in contrast to PADI.Besides,the efficiency of PAWI is higher than that of PADI to save computing resources by eliminating large dimensional matrix calculations and a lot of coordinate transformations.
From the comparison of positioning accuracy between two constellations of GPS and Galileo and three constellations of GPS,Galileo and GLONASS,it can be speculated that when positioning with all of four global navigation satellite systems,the positioning accuracy cannot be improved so much by using PADI compared with that of three constellations interoperating.With higher accuracy and lower computation,PAWI will result in a higher cost-effective for application in multimode receiver.
[1]LU Yun,YANG Qiang-wen.Study on GNSS Interoperability[J].SCIENTIA SINICA Phys,Mech & Astron,2010,40(5):534-540.
[2]The International Committee on Global Navigation Satellite Systems(ICG).Report of Working Group A:Compatibility and Interoperability[EB/OL].[2013-05-20].http://www.oosa.unvienna.org/pdf/icg/2009/icg-4/WGA-SEP2009.pdf.
[3]SEYNAT C,KEALY A,ZHANG Ke-fei.A Performance Analysis of Future Global Navigation Satellite Systems[J].Journal of Global Positioning System,2004,3(1):232-241.
[4]LIU Wei.Study on the Compatibility and Interoperability of GNSS[D].Shanghai:Shanghai Jiao Tong University,2011.
[5]PAONNI M,FONTANELLA D,EISSFELLER B,et al.Multi-constellation Interoperability Interference Assessment in the Framework of GNSS Modernization:An Evaluation of the Impact on the Receiver Performance[C]//Proceedings of the 2011International Technical Meeting of The Institute of Navigation.San Diego:[s.n.],2011:1207-1217.
[6]TURNER D A.GNSS Interoperability through International Cooperation[EB/OL].(2010-09-21)[2013-06-10].http://www.gps.gov/multimedia/presentations/2010/09/ION/turner.pdf.
[7]YANG Yuan-xi,LI Jin-long,XU Jun-yi,et al.Generalized DOPs with Consideration of the Influence Function of Signalin-Space Errors[J].The Journal of Navigation,2011,9(64):3-18.
[8]HU Hui,YUAN Chao.Performance Analysis of Galileo Global Position System[C]//2nd International Conference on Power Electronics and Intelligent Transportation System.Piscataway:IEEE,2009:396-399.
[9]WALTER F B.Achieving GPS-Galileo Interoperability:the Challenges ahead[J].Space Policy,2003,19(2):95-99.
[10]ZHOU Wei,HAO Jin-ming ZHU Xuan,et al.Study on Algorithm and Performance of Compatible Positioning with COMPASS and GPS[J].Science of Surveying and Mapping,2012,37(5):5-8.
[11]HOFMANN-WELLENHOF B,LICHTENEGGER H,WASLE E,et al.GNSS Global Navigation Satellite Systems GPS,GLONASS,Galileo & more[M].NewYork:Springer-Verlag,2008.
[12]ZHANG Peng-fei,XU Cheng-dong,HU Chun-sheng,et al.Coordinate Transformations in Satellite Navigation Systems[J].Advances in EECM,2012,2(LNEE340):249-257.
[13]ZHAO Chun-mei,OU Ji-kun,WEN Yuan-lan.Simulation and Analysis of System Performance of Galileo and Integrated GPS-Galileo[J].Journal of System Simulation,2005,17(4):1008-1011.
[14]ZHAO Jing,CAO Chong.The Development Trend Investigation of GNSS System and Its Technologies[J].GNSS World of China,2008(5):27-31.
