AMT试验台电机调速系统设计
2013-07-18黄星海刘海鸥杨爱均
黄星海, 刘海鸥, 杨爱均
(北京理工大学 机械与车辆学院,北京 100081)
AMT试验台电机调速系统设计
黄星海, 刘海鸥, 杨爱均
(北京理工大学 机械与车辆学院,北京 100081)
文章针对自动机械变速器试验台使用发动机存在成本高、安装复杂以及受负载限制而出现发动机运转不平稳等问题,设计了一种基于变频器的电机调速系统来代替发动机作为AMT试验台的动力源,并介绍了AMT试验台以及电机的调速原理,详细阐述了电机调速系统的设计方案。系统采用虚拟油门模拟油门踏板作为驾驶员意图的输入来控制电机,实现了调速系统与AMT控制单元之间的CAN通讯以及电机实时调速功能,并建立了自适应PID控制器,从而对电机的转速进行精确控制,实验结果表明电机调速系统能够满足AMT试验台的使用要求。
自动机械变速器;AMT试验台;发动机;变频器;电机调速系统;CAN通讯;自适应PID控制
0 引 言
自动机械变速器(AMT)是在传统定轴式齿轮变速器的基础上,控制器(ECU)根据驾驶员意图(油门开度及其变化率)和车辆运行状态(发动机转速、变速器输入轴转速、车速、挡位等),借助于相应的执行机构(离合器执行机构、选换挡执行机构),对发动机、离合器、变速器等进行自动协调操纵而实现的自动变速系统。它保留了传统机械变速器传动效率高、结构简单、成本低等优点,同时具有自动变速器操纵简单、乘坐舒适性良好的特点。随着AMT技术的发展,世界各大汽车厂商不再仅仅局限于自动换挡功能的开发,开始了智能化换挡技术的研究。
AMT台架试验是AMT研究开发中的重要环节,通过台架试验对AMT进行性能测试,优化换挡规律,实现最佳动力性和经济性,同时为AMT装车打下基础。由于安装比较复杂、成本较高以及发动机运行状态平稳性不易控制,在进行台架实验时一般采用感应电机来替代发动机作为动力源。为协调电机和变速器的控制,需要设计试验台的电机调速系统[1-2]。
1 AMT试验台的组成与原理
本试验台主要用于AMT系统在实车上的基本性能模拟和自动换挡功能实验,所涉及的AMT系统具有9个前进挡和1个倒挡;AMT系统的选位、换挡执行机构和离合器自动操纵机构均采用电控液动式,即通过液压油缸来控制选位、挂挡和离合器的分离结合;同时,该AMT采用复合式变速器,由主、副箱构成,副箱高低挡的切换通过电控气动执行机构实现;AMT系统ECU与发动机ECU通过CAN总线进行通讯,使离合器接合平顺、减小换挡冲击。试验台采用交流异步电机代替发动机作为动力源,主要分为电控部分和机械部分,电控部分由上位机、电机控制ECU和AMT电控单元ECU组成,上位机主要是通过与AMT电控ECU的串口通讯来监测AMT系统的状态并保存、分析试验数据;电机控制ECU根据模拟油门信号控制电机转速并与AMT电控ECU实现CAN通讯;AMT电控ECU是AMT系统的核心,作用是控制变速器自动换挡、离合器自动接合以及换挡时协同控制电机转速。机械部分主要包括三相交流异步电机、变频器、油源、气源、变速器、离合器总成、惯量、测功机以及各种相关传感器等,其工作原理如图1所示[3]。
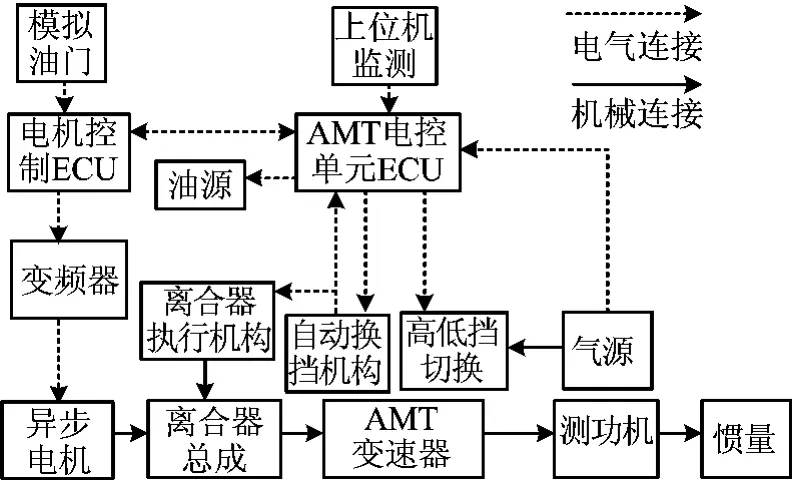
图1 AMT试验台工作原理图
2 电机控制需求分析与变频调速原理
本试验台采用异步电机代替实车发动机作为台架的动力源,需要电机具有发动机随油门、负载改变转速和输出扭矩的功能。因此,要求电机控制必须快速响应模拟油门的变化,当模拟油门变大或变小时,电机转速能快速、平滑地增大或减小,并稳定在某一个值;在换挡过程中,AMT电控ECU通过CAN通讯向电机控制ECU发送目标转速,电机控制应能快速地对电机转速进行调节,以使离合器结合得更平顺、更快捷,调速结束后,电机转速恢复由模拟油门控制;在整个系统运行过程中,电机控制ECU必须实时向AMT电控ECU发送油门和电机转速信息,以便AMT做出正确的决策。
对于三相异步交流电机有:

其中,Eg为气隙磁通在定子绕组中每相感应电动势的有效值;f1为定子的频率;N1为定子绕组的匝数;KN1为绕组系数;φm为每极气隙磁通量;Te为电机的电磁转矩;Cm为比例系数;I2为转子电流;cosφ2为转子回路功率因数[4]。
从(1)式可以看出,在进行电机调速时,为了保持电机最大扭矩不变,必须维持电机每极气隙磁通量为额定值,并保持不变,因此通过改变频率来调节电机转速的同时,也要改变定子的供电电压。要保持I的恒定,当频率f1从额定值也就是基频fN向下调时,必须同时降低Eg,使Eg/f1=常数,即气隙磁通感应电动势与频率之比为常数。然而感应电动势难以直接控制,忽略定子压降,认为定子相电压U1≈Eg,则U1/f1=常数,这就是恒压频比的控制方式,这种方式一般只用于基频以下的调速。低频时,由于U1、Eg都比较小,定子阻抗压降所占的分量就比较大,不能忽略,这时可以认为把定子电压U1抬高一些,以便近似地补偿定子压降。
3 电机调速系统设计
从本实验台的工作原理图可以看出,电机调速系统主要由电机、变频器、电机控制ECU、模拟油门以及转速传感器等组成。
因此,电机调速系统主要实现以下几个功能:
(1)CAN通讯功能。在实车中,AMT控制单元与发动机电控单元的通讯是动力传动一体化控制的关键,通过CAN总线技术实现AMT与发动机电控单元之间的通讯,达到数据共享,从而提高AMT起步、换挡的品质,因此实现电机调速系统的CAN通讯功能显得十分重要。
(2)电机实时调速功能。调速控制器主要接收2个控制信号,一是来自AMT电控单元通过CAN总线发出的调速信号,另一个是来自虚拟油门的控制信号,其中来自AMT电控单元的调速信号优先级更高,当有控制信号发出时,调速系统必须依据控制信号精确地进行电机转速调节。
(3)电机转速信号与模拟油门开度信号的采集,并发送给AMT系统ECU,以便其跟踪电机的当前状态。
3.1 系统控制方案设计
根据系统需要实现的功能,调速控制器采用飞思卡尔MC08HC908GZ16单片机,主要利用该单片机的MSCAN08、ESCI、定时器以及A/D模块等。本台架使用三菱变频器,其内部有与外部连接的控制回路,外部控制输入通过频率设定器来控制输出频率和电压的大小,进而控制电机转速,该变频器的频率设定器由功率为0.5W、电阻为1kΩ的可变电阻组成。可变电压由单片机通过定时器模块输出可调的PWM方波实现,输出的PWM方波经一阶低通滤波后输入变频器控制回路控制电机转速。该PWM方波的占空比可以通过模拟油门或CAN接收中断或者串口接收中断设定,系统工作原理如图2所示。

图2 调速系统工作原理图
从图2可以看出,系统只有在变频器处于外部工作模式下才能自动运行,当上电启动后,控制器实时检测是否有来自于CAN总线上AMT电控单元调速信号或虚拟油门的控制信号。当出现控制指令时,控制指令确定电机目标转速,得到的目标转速与电机当前转速进行比较,经PID控制算法计算后,单片机定时器通道输出一定占空比的PWM方波,其经电机控制电路转化成变化的电压输入变频器,进而精确控制电机转速变化。与此同时,调速控制器以20ms为周期不断地向AMT电控系统发送电机转速和虚拟油门大小[5-7]。
3.2 电机转速的自适应PID控制
为了对电机转速进行精确控制,系统采用模糊自适应PID控制器,其主要原理是以实际转速和目标转速的误差e和误差变化率ec作为模糊控制器的输入,利用模糊控制规则在线地对PID参数进行修正,这样便构成了模糊自适应PID控制器,如图3所示。自适应PID在线修正的工作原理如图4所示。

图3 自适应PID控制器框图

图4 自适应PID在线修正工作原理
PID参数的修正必须考虑到在不同时刻3个参数的作用以及相互关系,使被控对象达到动静态性能的最佳结合点[8],并建立模糊控制规则表。然后根据模糊控制规则表和3个输出量ΔkP、ΔkI、ΔkD的隶属度函数,得出输出量的查询表。系统工作时,根据不同的e和ec在线查出输出量的修正参数,然后代入(3)式计算完成对PID参数的在线修正。

4 电机调速实验及结果分析
为了验证所设计调速系统的功能,主要进行CAN通讯和控制电机调速试验。试验台按图1所示原理图连接好后(其中AMT电控系统不连接),用CAN卡将调速控制器与上位机连接,通过CAN-BUS测试软件接收与发送数据。电机加、减速试验是通过上位机向控制器发出一个目标转速控制指令,使电机加速或减速至目标转速,上位机与控制器使用CAN进行通讯以便同时测试控制器的CAN通讯功能。
电机调速实验结果如图5所示。
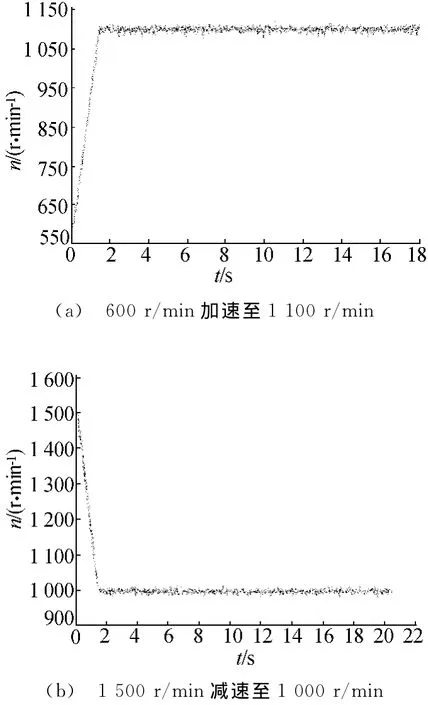
图5 电机调速实验结果
从图5所示的电机调速实验数据曲线可知,当t=0上位机发出调速指令时,电机转速没有立即发生变化,而是在起始转速周围波动,这是由于系统响应延迟造成的,响应时间大概为140ms;之后电机转速迅速上升或下降,电机转速的加速度和减速度相差不大,均为每秒400r/min左右;电机转速超调量很小,其稳定转速在目标转速上下波动,而且当稳定转速越高时,转速波动越大,因为当电机转速较高时,实验台架的振动加剧,导致系统所采用的磁电式传感器精度降低,而调速控制器不断地对转速进行调整,但其波动范围在允许的范围内。实验结果表明,所设计的调速系统控制电机的加速和减速特性满足实验要求。
5 结束语
本文根据AMT试验台的要求,设计了基于变频器的电机调速系统来控制电机,使其代替发动机作为试验台的动力源,调速系统采用虚拟油门模拟发动机油门踏板,并实现了CAN通讯功能,同时调速系统电机加速和减速特性良好,整个系统能很好地模拟发动机的一些基本功能,满足AMT试验台的动力需求。
[1]何忠波,白鸿柏.AMT技术的发展现状与展望[J].农业机械学报,2007,38(5):181-186.
[2]王洪亮,刘海鸥.越野车辆的自动变速系统[J].北京理工大学学报,2009,29(3):214-218.
[3]满益明,陈慧岩,龚建伟.自动机械变速器试验技术及联调试 验 台 设 计 [J].北 京 理 工 大 学 学 报,2008,28(6):500-504.
[4]张树国,李 栋,胡 竞.变频调速技术的工作原理[J].节能技术,2009,27(1):83-86.
[5]彭 科,姚 伟,唐正荣.浅谈变频调速的工作原理[J].矿业研究与开发,2006(Z1):114-117.
[6]冯 瑞,赵秀栩,罗元月.汽车变速器试验台自动控制系统的开发[J].武汉理工大学学报:信息与管理工程版,2006,28(4):75-77.
[7]施大顺,杜世俊,李红梅.异步电机PCPWM供电下动态性能的研究[J].合肥工业大学学报:自然科学版,2005,28(1):22-25.
[8]祁 鲲,厉 虹,张巧杰.异步电机调速系统基于灰色预测的模糊PI控制[J].北京信息科技大学学报:自然科学版,2012,27(3):64-67.
Design of motor speed control system on AMT test-bench
HUANG Xing-hai, LIU Hai-ou, YANG Ai-jun
(School of Machinery and Vehicles,Beijing Institute of Technology,Beijing 100081,China)
Aiming at solving problems like high cost,complex installation and unstable running because of loads restriction in the engine in used automatic mechanical transmission(AMT)test-bench,a motor speed control system based on frequency converter is designed to replace engine as the power source of AMT testbench.The principles of the AMT test-bench and the speed regulation of motor are introduced,and the design scheme for the motor speed control system is elaborated.The system uses virtual accelerator to simulate the accelerator pedal as the input of the driver’s intent to control the motor,and functions such as the CANBUS communication between the speed control system and AMT control unit and the real-time motor speed control are achieved.And a self-adaptive PID controller is established,thus accomplishing the precise control of the motor speed.The experiments are done to verify the system,and the results show that the motor speed control system meets the requirements of the AMT test-bench.
automatic mechanical transmission(AMT);AMT test-bench;engine;frequency converter;motor speed control system;CAN-BUS communication;self-adaptive PID control
U467.3
A
1003-5060(2013)02-0152-04
10.3969/j.issn.1003-5060.2013.02.006
2012-05-17;
2012-10-24
国家863计划资助项目(2006AA110115)
黄星海(1990-),男,江西宜春人,北京理工大学硕士生;
刘海鸥(1976-),女,河北唐山人,博士,北京理工大学副教授,硕士生导师.
(责任编辑 张 镅)