基于ARM、ZigBee技术的机场智能化驱鸟系统设计
2013-07-13赵超陈寿元邵增珍
赵超,陈寿元,邵增珍
(山东师范大学 信息科学与工程学院,山东 济南 250014)
基于ARM、ZigBee技术的机场智能化驱鸟系统设计
赵超,陈寿元,邵增珍
(山东师范大学 信息科学与工程学院,山东 济南 250014)
介绍了一种基于ARM、ZigBee技术的机场智能化防鸟撞驱鸟系统。该系统采用无线监测网络结合上位机监控管理中心框架,采用低功耗控制芯片STM32F103RBT、Maxstream公司的XBee模块、短波数传电台TDX-868A,融合无线传感器网络、GPS技术、电子罗盘和ARM等工控领域的技术,采用星型网络的拓扑结构,实现了对机场区域的鸟情监测,利用数据挖掘技术,对鸟情信息进行数据分析,预报鸟情,从根本上防止鸟撞事故的发生。
ARM;ZigBee网络;GPS;数据挖掘
鸟撞指鸟与飞机在空中相撞造成的飞行事故,具有多发性和突发性,一旦发生会使飞机受损,重者可使发动机失去动力,甚至飞机坠毁,造成重大人员伤亡[1]。随着我国环境的改善,鸟类的迁徙和反季水果的增长,我国鸟类的种类和数量在急剧增加。另一方面随着航空事业的发展,飞机数量大量增加、航线不断发展,而随着人们保护环境和爱鸟、护鸟意识的增强,鸟类数量逐年增多[2]。在避免鸟撞事故和保护鸟类上如何做到一个平衡,成为了当代鸟类学家和生态学家的一个新型研究热点。
目前国内外采用的是一系列简单直接的驱鸟方法,目前比较流行的驱鸟方法有煤气炮、录音驱鸟、驱鸟车、超声波驱鸟器、猎杀等[3]。煤气炮使用起来不方便且不环保如Claws驱鸟器主要由煤气炮和两个扩音喇叭组成,煤气炮通过点燃煤气瞬间发出爆鸣声[4]。现在该类产品逐渐被市场所淘汰。超声波驱鸟器由于覆盖范围的限制,起效慢,一般用在电力系统中,使用在机场效果不好。录音驱鸟,采用的方法是播放鸟类天敌的鸣叫声以及鸟类遇到伤害后的悲鸣声的录音,时间久了鸟类也会产生习惯化,对此置若罔闻[5]。国内机场现有的装备中的轨道式无人驾驶遥控驱鸟车装备有驱鸟炮和大功率喇叭等驱鸟设备,通过无线遥控使驱鸟车在轨道上来回巡逻[6],但是无线遥控驱鸟车对鸟情的处理受到轨道的限制,鸟类很容易适应。猎杀的方式虽然有效但是破坏了生态平衡,国内现有的驱鸟手段存在一定弊端,国外的声音驱鸟器成本过高,易损耗,而且往往存在着水土不服的缺点[7]。
本系统基于ZigBee和短波的无线传感器网络,实现了对机场区域鸟情信息的实时采集,解决了鸟情报警不及时和机场鸟情信息管理不规范的问题,同时通过无线网络和上位机监管平台结合数据挖掘技术,对鸟情报警信息进行管理分析,根据实时鸟情信息设定驱鸟方式从而联动驱鸟设备。驱鸟设备采用智能机器人和智能驱鸟炮,解决了鸟类对驱鸟设备的耐受性问题。利用无线传感器网络(WSN)的优势,初步解决了传统驱鸟的时效性差,管理不便、成本高、人员需求多等问题。有效驱赶鸟类,保护了生态平衡的同时有效降低了鸟撞事故的发生。
1 机场智能化驱鸟系统设计方案
机场智能化驱鸟系统结构介绍:基于对机场现场的驱鸟情况的考察,提出了以Cortex-M3内核的Stm32为核心的机场鸟情信息采集系统,利用电子罗盘和GPS技术采集现场鸟情,借助无线网络传输鸟情信息、控制信息。组合控制声音驱鸟、机器人驱鸟、煤气炮驱鸟等多种驱鸟方式达到良好的驱鸟效果。与传统驱鸟设备相比,鸟情的信息采集智能化,电子罗盘和GPS技术可以采集鸟情报警的方向、速度、地理位置,将鸟情信息数据存入数据库,利用数据挖掘技术对鸟情信息进行分析,对鸟情进行预报,在未出现鸟情的情况下提前做好准备工作,杜绝鸟撞事故的发生。传统的鸟情采集都是通过操作人员手写记录,这种方法既不规范又没有时效性。
机场智能化驱鸟系统框图如图1所示,机场驱鸟人员当发现危险情况时,通过鸟情信息采集仪操作面板上的键盘采集鸟情信息,借助ZigBee和短波无线网络传输到上位机管理平台。上位机软件对鸟情信息进行分析处理后,可以针对不同的鸟类和不同的鸟情,选择不同的驱鸟方式,如机器人驱鸟、音频驱鸟、煤气炮驱鸟等,也可以选择组合方式,将多种驱鸟方式组合起来使用,达到最佳的驱鸟效果。该系统的驱鸟设备在传统驱鸟设备的基础上做了一定的改进。传统的驱鸟设备单一化,每个飞行日的联动驱鸟设备相同,该系统中引用了多种驱鸟设备,确保了驱鸟设备的多样化,同时传统的驱鸟设备的动作模式都是事先固定好的嵌入到驱鸟设备中,音频驱鸟器中的声音都是固定的。该系统中的联动驱鸟设备可以根据不同的鸟情信息实时改变驱鸟方式,根据需要组合驱鸟设备,根据机场位置、季节、鸟类的不同设定驱鸟的声音。
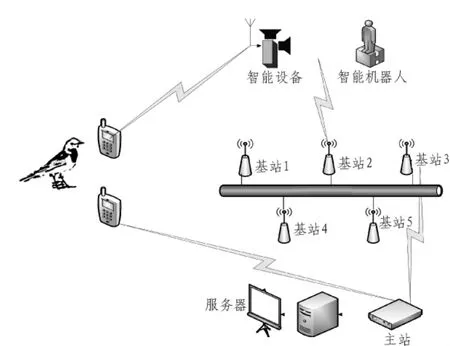
图1 机场智能化驱鸟系统框图Fig.1 Airport intelligent bird system block diagram
2 机场防鸟撞系统的模块功能设计分析
2.1 ZigBee网络
ZigBee技术是一种基于IEEE802.15.4协议标准[8]的新兴短距离、低功耗无线通信技术。它已经成为无线通信网络的一个研究热点,ZigBee技术主要特点包括低数据速率、低功耗、短时延、高容量、低成本等。
在WSN网络中所有ZigBee网络节点设备[10]分为以下3种类型:网络协调器节点(Coordinator)、路由节点(Router)和终端节点(End Device)。这3种节点类型都是网络层概念.他们的部署决定了网络拓扑形式。不论ZigBee网络采用何种拓扑方式.网络中都需要有一个并且只能有一个网络协调器节点。它是整个网络的规则制定者,管理整个网络的设备。它可以选择信道的频段,允许加入节点和删除节点。路由节点可以转发数据,延伸ZigBee网络规模。主要用于树型和网型拓扑结构中。路由节点不能够休眠。终端节点主要任务是发送和接收信息。节点类型的定义和节点在应用中所起到的作用并不相关。
2.2 鸟情信息传感器采集终端
STM32F103RBT6是鸟情信息采集终端的MPU和软件运行的平台,STM32F103是32位标准RISC嵌入式微处理器,该类处理器工作频率为72 MHz,内置128 KB的FLASH存储器和20KB的SRAM,存储器支持CF卡、SRAM、PSRAM、NOR和NAND存储器,内嵌串行单线 JTAG调试接口,内嵌跟踪模块(ETM),可以提供芯片运行时清晰的指令运行与数据流动的信息,拥有睡眠,停机,待机模式 3种低功耗模式。该信息采集终端配置了ZigBee模块、u-Blox公司的NEO-5Q高性能GPS芯片、电子罗盘部分、液晶显示部分和SD卡等。
该鸟情信息采集终端能够通过GPS芯片和电子罗盘采集鸟情预警信息的地理位置和方位,SD卡中根据不同地理位置和气候的不同存储了相应机场的鸟情和鸟类资料。操作人员通过按键和液晶屏幕中的人机界面进行鸟情信息的采集和预警。该信息采集终端同时能够点对点控制联动驱鸟设备,在紧急情况下组合联动驱鸟设备驱赶紧急情况下的飞鸟,同时将出现的鸟情上报到上位机软件平台。鸟情信息采集终端的结构组成如图2所示。
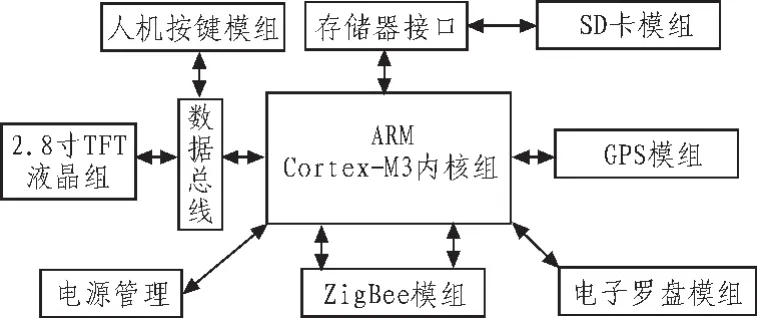
图2 信息采集终端结构组成Fig.2 Information collection terminal structure comosed
2.3 中继节点站
中继节点站的结构如图3所示,中继节点站上的ZigBee通信模块负责和联动驱鸟设备、鸟情信息采集终端通信,接收鸟情信息采集终端采集到的鸟情信息,下发控制联动驱鸟设备的命令信息。MCU负责ZigBee网络和短波无线网络数据的解析、处理和转发。短波电台通信模块负责和主站平台进行通信。该种组网方式大大降低了数据传输的误码率,提高了通信质量和效率。
中继节点站负责将采集终端采集到的鸟情信息分析处理后传输给主站上位机软件平台,中继节点站起到了信息上传下达的作用,这就要求具有良好的数据处理能力,中继节点站选用的微控制器是STC系列的STC12LE5A60S2微控制器。STC12C5A60S2单片机中包含中央处理器(CPU)、程序存储器(Flash)、数据存储器(SRAM)、定时/计数器、UART 串口、串口2、I/O接口、高速 A/D转换、SPI接口、PCA、看门狗及片内R/C振荡器和外部晶体振荡电路等模块[9]。STC12C5A60S2系列单片机几乎包含了数据采集和控制中所需的所有单元模块。
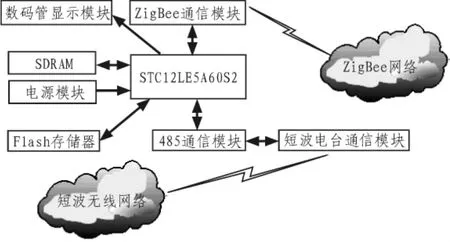
图3 中继站结构图Fig.3 Diagram of the relay station
每个中继节点和信息采集终端的ZigBee网络以星形网络的方式组网。短波数传电台模块选用的是TDX-868A数传电台,该型号电台的抗干扰性强,发射和接收灵敏度高,支持点对点、点对多点的无线数据通信,工作频段是433 MHz ISM频段,不需要额外申请频段,该电台的额定工作电压是+12 V,装载户外天线后通信距离可以达到3 km,该电台模块与外部的通信采用的接口是UART和RS485,最大的数据传输速率可以达到38 400 bps。
2.4 智能联动驱鸟设备
智能联动设备包括声驱炮、煤气炮、激光驱鸟器、机器人等,在此详细介绍其中一种新型的智能机器人,智能机器人能够接收上位机平台的命令信息和鸟情信息采集终端的报警信息做出响应。调整方向转向鸟情报警的方向进行组合驱鸟方式智能有效驱鸟。联动设备既要接收信息采集终端的命令信息,又要接收上位机监管平台的动作命令,所以选用的处理器是STC系列的STC12LE5A60S2微控制器,确保了工作稳定性和准确性。
该智能设备配置了ZigBee模块通信、数据存储、电动机、电磁炮、录放音模块。电动机用于转动调整机器人的动作方向和机器人手臂的摆动。电磁炮采用的是电容充电快速放电原理激发炸头动作,瞬间发出高达180分贝的爆鸣声。录放音模块选用的是工业型模块,能够实时更新声音,应对鸟类的耐受性,根据不同的机场和季节调整声音进行驱鸟。所有的模块可以同时启动,也可以根据上位机对鸟情分析后做出的命令信息组合不同的模式做出驱鸟动作。
3 软件设计
3.1 ZigBee设备的程序设计
终端节点和中继节点都是由MCU、XBee组成的。首先是对XBee的设置和调试试验,X—CTU是Digi西无线通讯产品测试软件和设置工具。它的功能包括:工作频段、网络ID号、某设备在网络中唯一的标识等参数的设定,以及信道通路的基本测试。
其次,在ZigBee设备中的主控芯片是软件编程的重点,同时也是对ZigBee协议栈的实现。针对STM32和STC12系列单片机的开发工作。应用最广泛的开发环境是KEIL集成开发平台。系统将ZigBee协议栈采用模块化程序设计方式。软件模块分为数据采集、数据发送和数据接收模块、XBee连接UART等模块。收发模块是其核心。
系统软件组成
3.2 信息采集终端软件
信息采集终端开机后进行初始化,初始化包含液晶初始化、Zigbee初始化、按键初始化3个部分,初始化正常后进入While循环等待报警中断的出现,当操作人员发现环境现场异常,出现鸟情信息时,需要启动联动设备或者将鸟情信息数据上传时,根据鸟情信息的类别按下信息采集终端相应按键,当相应按键按下触发中断后,根据不同的中断执行不同的程序,启用相应传感器采集现场鸟情信息,上传给上位机监管平台。信息采集终端的主程序流程图如图4所示。
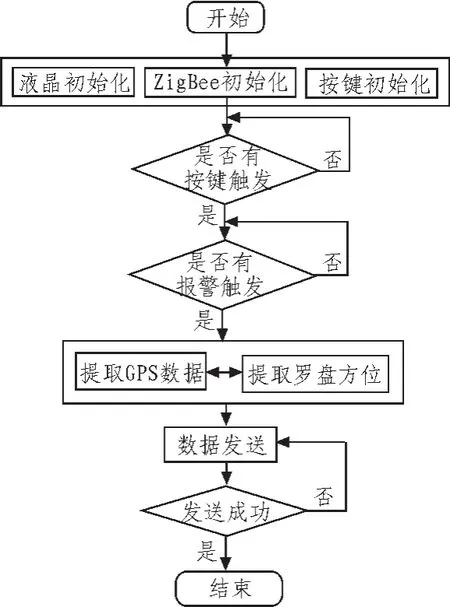
图4 鸟情信息采集终端程序流程图Fig.4 Bird information acquisition terminal program folwchart
3.3 中继节点站软件
中继站节点开机上电后,进行电台初始化、ZigBee初始化、数码管初始化,初始化完成后将基站的基本信息和通讯信息在数码管上循环显示,如果设备出现异常在数码管上显示异常报警信息,初始化正常后等待中断信号即,检测是否有串口中断,当信息采集终端鸟情信息传输到中继站节点触发串口中断,中继站MCU通过解析收到的数据,根据数据类型从短波数传电台发出。当主站平台的命令信息传输到中继节点站触发串口中断后,中继站MCU解析接收的数据信息,根据数据类型从ZigBee模块发送到ZigBee网络。中继节点站核心原理图如图5所示。
3.4 智能联动驱鸟设备软件
联动智能设备开机上电初始化后,检测驱鸟设备的各个驱鸟模块是否正常工作,如果不正常工作发送故障信号给主站平台进行汇报,如果驱鸟设备检测正常则进入While循环,检测是否有串口中断,当监测到串口中断后,对串口中断接收的数据进行解析,根据不同的数据类型和命令类型组合驱鸟模块做出相应的驱鸟动作。

图5 中继节点站核心原理图Fig.5 Relay station core schematic
4 结束语
本文针对当前机场的驱鸟手段效果差、方式落后,不方便管理等问题,研究了基于ZigBee技术的星形无线传感器网络和ARM等工控领域的技术在机场区域鸟情预警和防鸟撞中的应用,该系统已经在多个机场正常稳定运行,并取得良好的效果。在接下来的研究中将与高新技术如雷达的结合,使机场及周边地区的鸟情观测更科学精确,随着Internet技术的发展,机场鸟撞信息系统,必然会由各个相对孤立的机场转向相互紧密的联系,可做到数据、信息、经验的共享,将实现自动化采集鸟情和驱鸟,实现驱鸟的智能化,从根本上解决鸟撞事故的发生,同时保持生态的平衡不被破坏。
[1]李俊红,何文珊,陆健健.浦东国际机场鸟情信息系统的设计与建立[J].华东师范大学学报,2001,9(3):61-62.
LI Jun-hong,HE Wen-shan,LU Jian-jian.Pudong international airport and the birds love the design of information systems and the establishment of[J].East China Normal University,2001,9(3):61-62.
[2]彭金望,杜庆磊,余先涛,等.基于ARM的机场驱鸟车自动控制系统[J].自动化技术与应用,2008,4(27):105-106.
PENG Jin-wang,DU Qing-lei,YU Xian-tao,et al.Airport bird control system based on ARM[J].Automation Technologies and Applications,2008,4(27):105-106.
[3]李其颖.鸟撞飞机的一般规律和防撞措施[J].航空学报,1988(8):33-34.
Li Qi-ying.Bird aircraft general,laws and measures[J].Journal of Aviation,1988(8):33-134.
[4]杨荣,李远征,吴爱权,等.机场Claws驱鸟器的效能评价[J].安徽师范大学学报,2009,1(32):60-61.
YANG Rong,LI Yuan-zheng,WU Ai-quan,et al.Airport claws the efficacy evaluation of bird repeller[J].Journal of Anhui Normal University,2009,1(32):60-61.
[5]陈俊,宋利民.机场无线驱鸟网络的设计与实现[D].大连:大连海事大学,2007.
[6]林鹰.国内机场装备无人驾驶遥控驱鸟车 [J].交通与运输,2006(3):45-47.
LIN Ying.Domesticairportsequipped withunmanned remote-control cars driving birds[J].Transport and Transport,2006(3):45-47.
[7]关长亮,王贵成.太阳能农业杀虫驱鸟仪的研制[J].科学论坛,2010(1):70-71.
GUAN Chang-liang,WANG Gui-cheng.Domestic airports equipped with unmanned remote-control cars driving birds[J].Transport and Transport,2006(3):45-47.
[8]包长春,石瑞珍,马玉泉,等.基于ZigBee技术的农业设施测控系统的设计[J].农业工程学报,2007(8):160-161.
BAO Chang-chun,SHI Rui-zhen,MA Yu-quan,et al.Agricultural facilities design of measurement and control system based on ZigBee technology[J].Journal of Agricultural Engineering,2007(8):160-161.
Bird system based on ARM and ZigBee technology airport intelligent
ZHAO Chao, CHEN Shou-yuan, SHAO Zeng-zhen
(Information Science and Engineering College, Shandong Normal University,Jinan 250014, China)
A ARM ZigBee technology airport intelligent anti-bird strike bird is introduced.The system uses a wireless monitoring network combined with the the PC monitoring center framework,the use of low-power control chip STM32F103RBT,the Maxstream company XBee module,shortwave data transmission radio TDX-868A,the integration of wireless sensor networks, GPS technology, electronic compass and ARM IPC the field of technology, using a star network topology, bird Surveillance in the airport area, using data mining techniques of bird intelligence information, data analysis,forecasting birds love,fundamentally prevent bird strike accidents.
ARM;ZigBee network;GPS;data mining
TN92
A
1674-6236(2013)08-0184-04
2012-11-14稿件编号201211106
赵 超(1988—),男,山东枣庄人,硕士研究生。研究方向:无线传感器网络。