基于JASON-1高度计的海况偏差校正参数模型
2013-07-07李书光王云海苗洪利周晓光任浩然王桂忠
李书光,王云海,,苗洪利,周晓光,任浩然,王桂忠,张 杰
(1.中国石油大学理学院,山东青岛 266580;2.国家海洋局第一海洋研究所海洋物理与遥感研究室,山东青岛 266061; 3.中国海洋大学信息科学与工程学院,山东青岛 266100)
基于JASON-1高度计的海况偏差校正参数模型
李书光1,王云海1,2,苗洪利3,周晓光3,任浩然3,王桂忠3,张 杰2
(1.中国石油大学理学院,山东青岛 266580;2.国家海洋局第一海洋研究所海洋物理与遥感研究室,山东青岛 266061; 3.中国海洋大学信息科学与工程学院,山东青岛 266100)
基于JASON-1高度计研究海况偏差校正参数模型。采用交叉点处测量值差分的方法消除高度计中除海况偏差之外的噪声信号。基于泰勒展开构造以有效波高、风速为变量的32种海况偏差参数模型,利用线性回归的方法得到各模型的参数估计值,并对其进行评价、筛选得到最优模型。通过将该模型的海况偏差校正值与JASON-1的地球物理数据集(GDR)数据相对比,进一步验证该参数模型的有效性。结果表明:该参数模型有效,可以用于JASON-1高度计的海况偏差校正。
高度计;海况偏差;参数模型;线性回归;交叉点差分
海况偏差由电磁偏差、斜偏差和追踪偏差三部分组成[1],是卫星高度计测量海表面高度主要的误差源之一[2],主要有理论和经验两种研究方法。理论方法得到的海况偏差模型[3-12]通常只能用来做定性分析,并且其需要的参数(如偏斜系数、统计动差和波谱)并不能从高度计数据中得到,理论模型并不实用[13]。经验方法认为海况偏差是高度计可测得的与海况相关的变量(如风速v、有效波高Hsw、后向散射系数σ0以及它们的组合等)的函数,其最大的优势就是可以利用高度计所测得的覆盖全球、数量极大的数据集。主要有参数模型[1,14-18]和非参数模型[2,19-23]等。在JASON-1高度计中,海况偏差校正采用的是Gaspar等提出的非参数模型[20]。非参数模型无法计算超出建模所用海况数据范围的海况下的海况偏差值,并且在建模数据密度稀少的海况区域,海况偏差估计精度较差[21]。参数模型相对非参数模型具有表达式外延性好、简单直观、分析容易以及使用方便的优点。笔者基于JASON-1高度计数据开展海况偏差校正参数模型的研究。
1 原 理
1.1 信号噪声的处理
研究海况偏差校正参数模型时所用的初始数据是高度计相对于参考椭球面的海表面高度(Hss)。未校正的海表面高度测量值H′ss可以表示为

式中,B为海况偏差;hg为大地水准面高度;hd为海表面动力高度;ε'为除海况偏差之外的所有测高误差之和,包括轨道误差、仪器误差和其他地球物理校正误差。
海况偏差只是高度计数据中一个小信号,大地水准面高度是数据中最大的信号,海表面动力高度也是高度计数据中一个很大的信号。通常采用对卫星轨道地面轨迹交叉点处测量数据进行差分的方法来消除大地水准面信号和海表面动力高度信号中的定常部分。对交叉点之间不同时间的测量值进行差分,则公式(1)可表示为

式中,ΔH′ss称为交叉点处海表面高度的不符值,它消除了数据中的所有不随时间改变的信号部分,如大地水准面,动力地形的定常部分等;Δhd为海表面动力高度的变化量。在JASON-1数据集中,升轨和降轨在交叉点处平均时间间隔为3.5 d,hd在此短时间间隔内的变化一般是很有限的。
1.2 建模依据
参数模型基于海况偏差B与有效波高Hsw线性相关这一基本假设,则海况偏差参数模型可写为

式中,b为一个无量纲的负值,称为海况偏差系数;X为与海况相关的变量组成的向量;θ为参数向量。在以往的经验研究中,X一般直接从高度计测得的与海况相关的变量中选取,即有效波高Hsw、风速v或后向散射系数σ0以及它们的组合。由于v和σ0具有高度相关性(通常用σ0反演v),因此,两者只能选其一。本研究选择使用v。将b对Hsw和v进行泰勒展开,则可得到海况偏差校正参数模型为

公式(4)所表达的各模型均保留常数项a1,依次增加变量的个数,则可以得到数量众多的海况偏差校正参数模型。按照选取的变量名对模型进行命名,例如,选取a1、a3和a6项的模型命名为M136。
2 模型的建立
2.1 数据集
所用的数据集是从JASON-1的Ku波段cycle40~cycle140的地球物理数据集(GDR)中提取的交叉点数据,提取交叉点采用的是分段拟合卫星地面轨道轨迹的方法。对交叉点处的海表面高度测量值添加了仪器、干对流层、湿对流层、电离层、大气逆压、高频振荡、海洋潮汐、极潮、固体地球潮以及负荷潮等校正。并对数据集采用以下质量控制:
(1)去除指向角大于0.3°的数据;
(2)去除后向散射系数σ0<7 dB、σ0>20 dB的所有数据;
(3)去除有效波高Hsw>11 m的全部数据。
经过质量控制后,共得到253152组未经海况偏差校正的海表面高度、风速、有效波高测量值的交叉点数据集(H′ss,Hsw,v)。根据模型形式对Hsw、v进行组合并对其进行差值,最终获得确定模型系数所需要的(ΔH′ss,ΔHsw,Δv,Δ,Δv2,Δ(Hswv),Δ(v),…)数据集。
2.2 模型参数的确定
高度计数据中海况偏差信号可以表示为

式中,εB为参数模型所不能解释的海况偏差信号部分;Xi为公式(4)中的变量;ai为变量Xi对应的参数。则公式(2)变为

将所有误差合并为偏差a0和平均值为零的噪声ε的和,则式(6)可重新表示为

假定噪声ε满足高斯-马尔柯夫条件和正态分布条件,那么此问题成为一个典型的多元线性回归问题。给定n组(ΔH′ss,ΔX)观测值,则参数的标准线性最小二乘估计为

如果ΔX和ε不相关,则估计量无偏。
2.3 模型评价及优选
在给定0.05的显著性水平下,对所有模型进行F、Fi和决定系数(R2)检验,若F、Fi和决定系数(R2)其中之一的值小于其临界值,则淘汰该模型。其中
式中,m为模型中变量的数量;n为数据数量;Rss为回归平方和;Ess为残差平方和;Pi为偏回归平方和; Tss为总变差。
按照上述方法发现,当海况偏差系数b展开到三阶时,其模型性能相对二阶模型没有得到提升,并且海况偏差计算值出现了正值,这与海况偏差为负值相悖。因此,将b的泰勒展开式限制在二阶。则公式(4)可以简化为

公式(9)所表达的模型均保留常数项a1,依次增加变量的个数,则可以得到1个常数模型,5个二参数模型,10个三参数模型,10个四参数模型,5个五参数模型,1个六参数模型,共计32种形式。各模型的F、R2以及解释方差值D见表1。解释方差D定义为未经海况偏差校正前交叉点海表面高度H′ss不符值的方差减去经过海况偏差校正后海表面高度Hss不符值的方差,可以理解为交叉点海表面高度不符值的方差中海况偏差能够解释的部分,用其来评价海况偏差模型的有效性,其值越大说明模型越有效。

表1 模型性能评价Table 1 Evaluation of model functions
按照上述评价方法,经检验,所有的模型对应的F值和R2均大于其临界值,因此这32个模型总体自变量对因变量的线性影响和线性回归的效果都是显著的;Fi值在表中没有列出。除模型M1256的第3项(F3值为0.04)、M12356的第5项(F5值为2.03)对因变量作用不显著外,其余模型的各项作用都显著。而从表1中也可以看出,这两个模型与去掉不显著变量对应的模型相比其性能基本无任何改观,因此淘汰这两个模型。
在以上模型参数检验的基础上,对剩余的6组30个模型进行优选,优选的标准是:(1)决定系数值最大;(2)解释方差最大。按此标准,从表1中可以看出,随着变量数量的增加,模型的性能整体上有所提升。因而,研究得到的最优模型是M123456,其R2
2.4 最优模型特征分析
图1和图2分别给出了模型M123456的平均回值及D在30个模型中都是最大。回归得到它的参数为:归残差()与有效波高不符值ΔHsw、风速不符值Δv关系的散点图。随ΔHsw和Δv的变化越小,说明模型中参数估计偏差越小。

图1 平均回归残差¯ε随ΔHsw变化Fig.1 Variation of mean regression residuals with ΔHsw
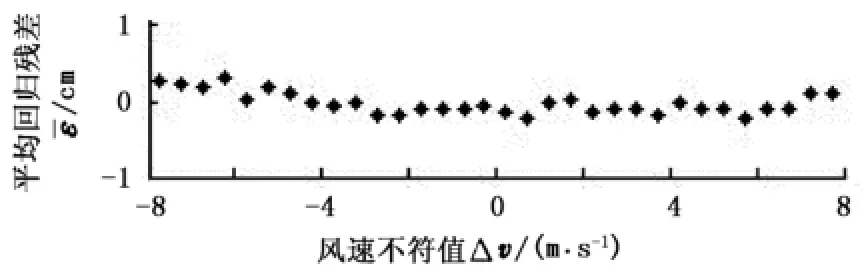
图2 平均回归残差¯ε随Δv变化Fig.2 Variation of mean regression residuals with Δv
由图1可以看到,绝大部分ε分布在-0.1~0.5 cm之间;ΔHsw在-4~4 m范围内波动较小,都在-0.5~0.5 cm之间。由图2可以看出,全部分布在0线附近。因此,模型的参数估计值的偏差较小。
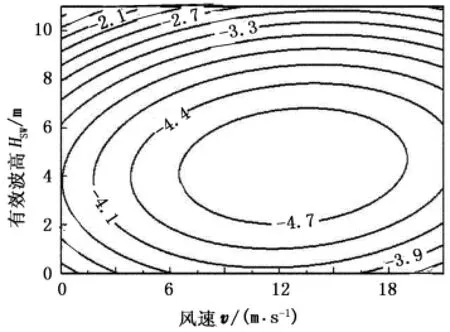
图3 b随Hsw和v的分布特征Fig.3 b as a function of Hswand v
图3是由模型M123456计算得到的海况偏差系数b乘以100后的值随Hsw和v的分布特征图。从中可以看到,b随Hsw变化明显。Hsw小于4 m时,随着Hsw的增大,b的绝对值从3.6增大到4. 7;Hsw大于4 m时,随Hsw的增大b的绝对值从4.7递减到1.9。这与Witter和Chelton[24]基于GEOSAT数据研究得出的结论相近。b随v的变化基本以13 m/s为分界点,v小于13 m/s时,随v的增加,b的绝对值增大,v大于13 m/s时,随v的增加,b的绝对值减小,这与Rodriguez等[6]通过数值模拟试验得出的结论相近。
3 模型验证

式中,n为选取数据的数量;Bi为参数模型校正值; Byi为GDR数据中对应的海况偏差校正值。
经计算,全局数据的标准偏差S为2.39 cm,相对误差为11.18%,说明参数模型计算值和GDR数据整体吻合度较好。
(2)计算B和By两者之差ΔB,绘制其概率密度分布图(图4)及随有效波高和风速的变化图(图5)。
为了检验参数模型的适用性,本文中将M123456模型海况偏差校正值与JASON-1的GDR第41~76cycle覆盖一年的数据进行比对研究。
(1)计算全局拟合标准偏差S,用来整体上判断两者的符合度。其中
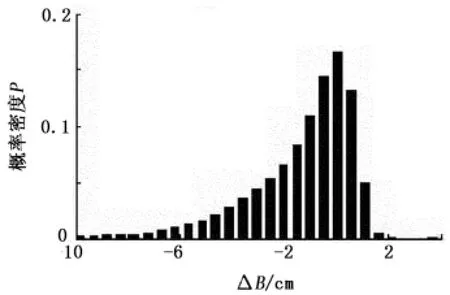
图4 ΔB概率密度分布Fig.4 Probability density distribution of ΔB
由图4可以看出,ΔB主要集中在-4~1 cm之间,此范围内的数据占总数据的87.1%,说明B和By在绝大多数的数据内符合度良好。

图5 ΔB随Hsw和v的变化Fig.5 Variation of ΔB with Hswand v
由图5可看出,B和By在绝大多数的Hsw、v范围内符合度良好,尤其是Hsw在0~5 m范围内,此海况条件下ΔB主要集中在-4~1 cm之间。
4 结束语
基于JASON-1数据研究了海况偏差校正参数模型,利用线性回归的方法确定了各模型的参数估计值,经评价、筛选得到最优模型是M123456,该模型解释方差为39.61 cm2。通过与JASON-1 GDR数据中采用非参数模型所得的海况偏差值比对,得到整体标准偏差S为2.39 cm,在绝大多数海况条件下两者符合度良好。因此,该模型可以用于JASON-1高度计的海况偏差校正。
[1] GASPAR P,OGOR F,Le TRAON P Y,et al.Estimating the sea state bias of the TOPEX and POSEIDON altimeters from crossover differences[J].Journal of Geophysical Research,1994,99:24981-24994.
[2] LABROUE S,GASPAR P,DORANDEU J,et al.Non parametric estimates of the sea state bias for the Jason-1 radar altimeter[J].Marine Geodesy,2004,27(3/4): 453-481.
[3] JACKSON F C.The reflection of impulses from a nonlinear random sea[J].Journal of Geophysical Research, 1979,84:4939-4943.
[4] BARRICK D E,LIPA B J.Analysis and interpretation of altimeter sea echo[J].Adv Geophys,1985,27:60-99.
[5] SROKOSZ M A.On the joint distribution of surface elevation and slopes for a nonlinear random sea,with an application to radar altimetry[J].Journal of Geophysical Research,1986,91:995-1006.
[6] RODRIGUEZ E,KIM Y,MARTIN J M.The effect of small-wave modulation on the electromagnetic bias[J]. Journal of Geophysical Research,1992,97:2379-2389.
[7] GLAZMAN R,FABRIKANT A,SROKOSZ M.Numerical analysis of the sea state bias for satellite altimetry [J].Journal of Geophysical Research,1996,101:3789-3799.
[8] ELFOUHAILY T,CHAPRON B,KATSAROS K,et al. Weakly nonlinear theory and sea state bias estimations [J].Journal of Geophysical Research,1999,104:7641-7647.
[9] ELFOUHAILY T,THOMPSON D R,CHAPRON B,et al.Improved electromagnetic bias theory[J].Journal of Geophysical Research,2000,105:1299-1310.
[10] WARNICK K F,MILLET F W,ARNOLD D V.Physical and geometrical optics for 2-D surface with power-law height spectra[J].IEEE Trans Antennas Propag, 2005,53(3):922-932.
[11] MILLET F W,WARNIC K F,NAGEL J R,et al. Physical optics-based electromagnetic bias theory with surface height-slope cross-correlation and hydrodynamic modulation[J].IEEE Transactions on Geoscience and Remote Sensing,2006,44(6):1470-1483.
[12] NAENNA Praphun,JOHNSON Joel T.A Monte Carlo study of altimeter pulse returns and the electromagnetic bias[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(8):3218-3224.
[13] FU L L,CAZENAVE Anny.Satellite altimetry and earth sciences:a handbook of techniques and applications[M].Academic Press,2001:57-64.
[14] WITTER D L,CHELTON D B.A Geosat altimeter wind speed algorithm and a method for altimeter wind speed algorithm development[J].Journal of Geophysical Research,1991a,96:8853-8860.
[15] RAY Richard D,KOBLINSKY C J,CHESTER J.On the sea-state bias of the Geosat altimeter[J].Journal of Atmospheric and Oceanic Technology,1991,8:397-408.
[16] FU L L,GLAZMAN R.The effect of the degree of wave development on the sea state bias in radar altimetry measurement[J].Journal of Geophysical Research, 1991,96:829-834.
[17] RAY R D,KOBLINSKY C J,BECKLEY B D.On the effectiveness of Geosat altimeter corrections[J].Int J Remote Sens,1991,12:1979-1984.
[18] CHELTON D B.The sea state bias in altimeter estimates of sea level from collinear analysis of TOPEX data [J].Journal of Geophysical Research,1994,99: 24995-25008.
[19] GASPAR P,FLORENS J P.Estimation of the sea state bias in radar altimeter measurements of sea level:results from a new non parametric method[J].Journal of Geophysical Research,1998,103:15803-15814.
[20] GASPAR P,LABROUE S,OGOR F,et al.Improving nonparametric estimates of the sea state bias in radar altimeter measurements of sea level[J].JAOT,2002, 19:1690-1707.
[21] SCHARROO R,LILLIBRIDGE J.Non-parametric seastate bias models and their relevance to sea level change studies.Proceedings of the 2004 Envisat&ERS Symposium,Salzburg,Austria,September 6-10,2004[C/ OL].[2011-05-10]http://earth.esa.int/workshops/ salzburg04/papers_posters/2P05_1_scharroo_198r.pdf.
[22] FENG Hui,YAO Shan,LI Lin-yuan,et al.Splinebased nonparametric estimation of the altimeter sea-state bias correction[J].IEEE Geoscience and Remote Sensing Letters,2010,7(3):577-581.
[23] TRAN N,LABROUE S,PHILIPPS S,et al.Overview and update of the sea state bias corrections for the Jason-2,Jason-1 and TOPEX missions[J].Marine Geodesy, 2010,33(S1):348-362.
[24] WITTER D L,CHELTON D B.An apparent wave height dependence in the sea-state bias in GEOSAT altimeter range measurements[J].Journal of Geophysical Research,1991b,96:8861-8867.
(编辑 修荣荣)
A parametric model of estimating sea state bias based on JASON-1 altimetry
LI Shu-guang1,WANG Yun-hai1,2,MIAO Hong-li3,ZHOU Xiao-guang3, REN Hao-ran3,WANG Gui-zhong3,ZHANG Jie2
(1.College of Science in China University of Petroleum,Qingdao 266580,China;
2.The First Institute of Oceanography,SOA,Qingdao 266061,China;
3.College of Information Science and Engineering in Ocean University of China,Qingdao 266100,China)
Based on the data of JASON-1 altimetry,the parametric model of estimating the sea state bias(SSB)was studied. Non-SSB signals within the altimeter data were eliminated by means of forming differences between measurements taken at crossover points.According to Taylor expansion,32 parametric models of SSB were developed as the function of both the significant wave height and wave speed.The estimation values of each parametric model were derived from the linear regression, and then the optimal model was obtained via the process of evaluation and selection.Finally,the effectiveness of the parametric model was validated through comparing the SSB estimation of the model with the geophysical data records(GDR)of JASON-1.The results show that the parametric model is effective,and can be used for JASON-1 SSB correction.
JASON-1 altimetry;sea state bias;parametric model;linear regression;difference at crossover points
TP 722. 6;P 228.3
A
1673-5005(2013)02-0181-06
10.3969/j.issn.1673-5005.2013.02.030
2011-07-22
海洋公益性科研专项(201105032-1);国家自然科学基金项目(41176157)
李书光(1964-),男,教授,硕士,主要研究方向为声学与弹性波理论和应用。E-mail:lshguang@upc.edu.cn。
