基于嵌入式控制器的便携式卫星通信控制系统设计
2013-07-05孙钟阜范利娟
孙钟阜,郭 健,范利娟
(1.海军驻上海地区水声导航系统军事代表,上海 201108;2.南京理工大学 自动化学院,江苏 南京 210094)
0 引言
我国幅员辽阔、地理复杂,地质灾害频繁发生且县、乡两级的通信保障非常薄弱,当发生重大灾难时,由于常规通信手段中断、交通不便等原因常常导致卫星应急通讯车无法到达灾害地点。因此开发适用于应急通信、便于救灾人员随身带入灾区以快速进行远程数据通信和现场视频转播等业务的便携式卫星通信系统已成为重要需求[1,2]。
便携式卫星通信系统,通过与地球同步轨道卫星链路形成卫星通信网络,是实现远程数据传输、事故现场应急通信和现场视频转播等业务的良好手段。被广泛应用于交通运输、抢险救灾、新闻采访、科考探险、公安、军事等应急和特殊通信领域[3~9]。
便携式卫星通信系统的关键技术主要集中于两方面:便携式卫星通信系统和高性能天线控制系统。本文主要研究并设计天线控制系统。
1 总体结构设计
1.1 机械结构
本文设计的便携式卫星通信系统的机械结构采用立轴式俯仰-方位型天线座,如图1所示。俯仰-方位型天线座由驱动装置和支撑转动装置构成,用方位轴支撑天线的方位部分转动,俯仰轴支撑俯仰部分转动。
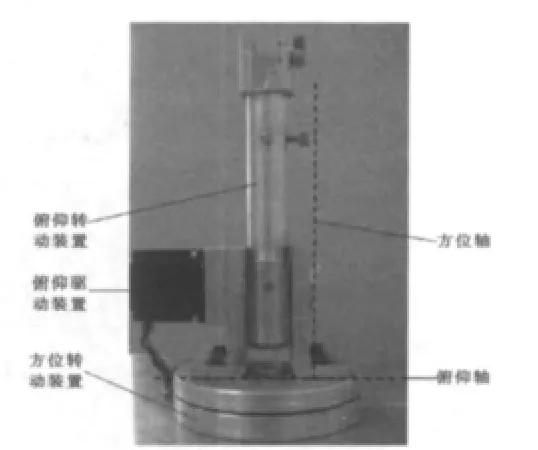
图1 俯仰-方位型天线座架实物图Fig.1 The base of two-axis antenna
1.2 控制结构
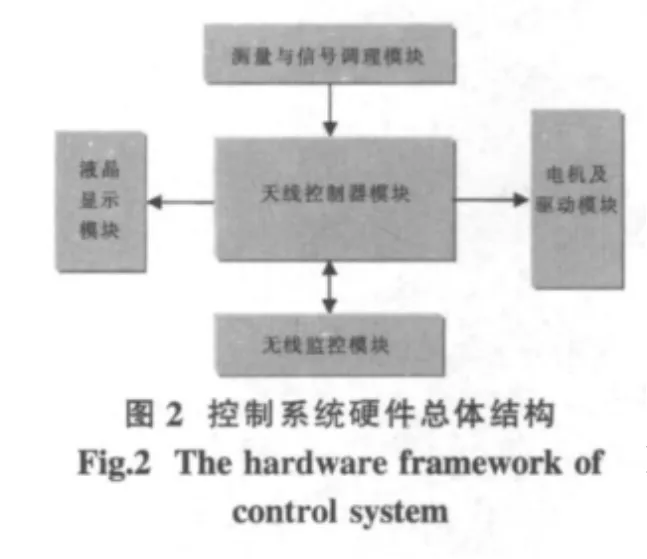
便携式卫星通信控制系统整体结构如图2所示。其中各模块主要设计和功能如下:
(1)测量与信号调理模块用于测量天线姿态和位置。本系统采用GPS、三轴电子罗盘HMR3300和信标机实现天线位置和姿态测量:GPS用于测量通信系统所在地的地理位置,HMR3300用于测量天线的方位、俯仰姿态信息,信标机则通过输出AGC电平检测天线的对星精度;GPS和HMR3300均通过串口输出数据,而信标机的AGC电平模拟信号经过信号调理模块进行滤波、放大。
(2)天线控制器模块和电机及驱动模块相结合,用于实现天线的卫星跟踪和指向对准。对于控制器,考虑到系统实时性和快速性要求较高,选用了低功耗和高性能的TMS320F2812作为系统的主控芯片;为使系统结构紧凑,驱动电机采用MT57STH52-3008A混合步进电机。
(3)液晶显示模块用于实时显示天线的方位、俯仰指向和信标接收机输出的电平值等信息。
(4)无线监控模块用于实现用户对控制系统的实时监控,向控制系统发送指令,同时接收控制系统发送过来的数据并将其显示在上位机(如PC机)上,一方面便于用户掌握天线的实时状态信息,另一方面可切换为天线遥操作。
2 控制系统工作原理
控制系统所能实现的天线对星性能决定了系统通信质量。为了实现高精度、快速对星,本系统采用粗精对准相结合的方法,实现卫星信号的快速搜索与高精度指向:系统的卫星信号搜索是一个粗对准的过程,通过程序跟踪的方法实现;天线的高精度指向是一个精对准的过程,通过步进跟踪的方法实现。
2.1 天线搜索与控制
卫星信号的搜索即粗对准采用程序跟踪的方法。
(1)方位角、俯仰角计算。天线对星指向角的计算需同时知道地球站所在地的经度、纬度和静止卫星的在轨经度。静止卫星S与地球站A之间的几何关系如图3所示。
图中,A表示地球站,S表示静止卫星,B为地球站A的经线与赤道的交点,O与S的连线在地球表面上的交点C称为星下点,地球表面上通过A点和C点的弧线AC称为方位线,AN为AC的切线,AM为AB的切线,面OAS为方位面,D为切线AM与赤道平面的交点,E为切线AN与赤道平面的交点。
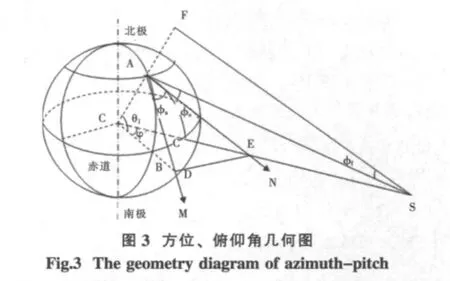
地球站与静止卫星的连线称为直视线,直视线在地面上的投影,即地球站与星下点间的弧线称为地球站对静止卫星的方位线,方位线与直视线确定的平面称为方位面。方位角是指地球站所在经线的正南方向按顺时针方向与方位面所构成的夹角,用∠MAN表示,俯仰角是指地球站的方位线与直视线的夹角。
设地球站A的经度和纬度分别为φ和θ1,静止卫星经度为φ2,经度差△φ=φ1-φ2,以下具体给出地球站天线对准卫星所需的方位角φa和俯仰角φe的推导过程。对于方位角,由图可得:

由以上三式可以得出天线方位角:

由于利用上式求出的方位角是以正南方向为基准求得的,故实际的方位角可用下述方法求出:
方法一:地面站位于北半球:一是卫星位于地面站东南方向:方位角=180°-φa;二是卫星位于地面站西南方向: 方位角=180°+φa。
方法二:地面站位于南半球:一是卫星位于地面站东北方向:方位角=φa;二是卫星位于地面站西北方向:方位角=360°-φa。如果计算出的方位角是正值,则天线向正南偏东转动,反之,则天线向正南偏西转动。对于俯仰角,同样计算可得:

(2)基于分区PID的天线控制算法。得到方位角和俯仰角度后,需要对电机进行控制,驱动其又快又好地到达期望的位置。
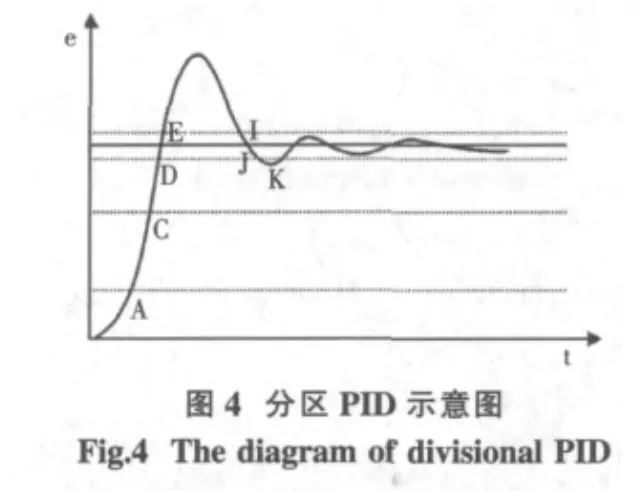
常规的PID控制器采用固定的控制参数,难以兼顾快速性和平稳性的控制要求。为实现天线快速、平稳控制,本系统设计了基于分区PID的控制算法,即根据误差将系统分为若干区,不同的分区采用不同的PID控制策略,引导系统又快又好地到达指令位置。为简化控制器设计,对误差分区时采用对称分区。具体原理和设计如图4所示。
O-A阶段:此时偏差很大,系统远离期望位置,考虑采用控制器输出的最大值进行控制,即 Bangbang控制;A-C阶段:此时偏差较大,但为防止系统上升过快导致较大超调,考虑采用比例控制(P控制);C-D阶段:此时偏差在一定范围内,为实现系统平稳控制,采用比例-微分控制(PD控制);D-E阶段:此时偏差较小,为实现系统平稳、准确控制到位,采用PID控制。在天线的搜索过程中,俯仰系统、方位系统均采取分区PID控制算法。
此外,天线转动的同时不断采集信标接收机输出的AGC电平值,该值反馈至天线控制器,并与设定的搜索门限值进行比较、判断。当AGC电平值大于搜索门限后,结束搜索状态,进入跟踪状态,否则继续进行天线搜索。
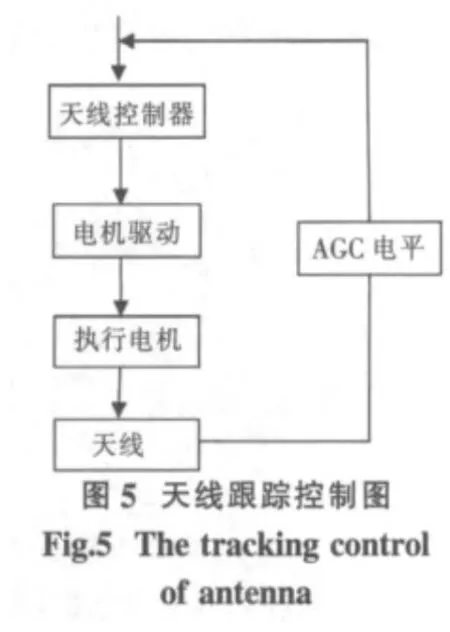
2.2 天线跟踪算法
经过粗对准完成卫星信号的搜索,天线进入能收到信号的范围,但是收到的信号强度较弱,距离信号最强指向还有一定的角度偏差。为了使信号接收效果达到最佳,需进入跟踪状态,即进一步做天线指向的精对准。在这一阶段,需在利用信标接收机的输出电平AGC的大小变化进行步进跟踪,最终找到信号最强(AGC电平值最大)的位置作为对准卫星的目标位置。
处于跟踪状态的天线控制系统采用步进跟踪方法。方位和俯仰电机按照俯仰向上~方位向左~俯仰向下~方位向右的顺序转动一圈,在此过程中,电机每走一步,就比较此时信标接收机输出的AGC电平与之前一次输出的AGC电平的大小,如果AGC电平变大,则电机在同方向继续走一步,反之,则改变跟踪方向,使另一方向的电机走一步。如果在跟踪几圈后发现信标接收机输出的AGC电平一直大于跟踪门限电平,则认为天线已经对准卫星,此时天线在这状态,开始接收卫星信号进行通信。
在通信过程的同时不间断地采样AGC电平,若由于外界干扰等因素导致AGC电平值又重新小于跟踪门限电平,则退出稳定状态,进入卫星跟踪状态,如果AGC电平小于搜索门限电平,则进入卫星搜索状态。图5为闭环步进跟踪的转动控制算法。
3 系统控制软件设计
天线控制系统软件的任务就是设计实现系统的各模块功能,本系统的软件设计分为三大块:DSP与天线姿态的初始化、卫星信号的搜索、卫星信号的跟踪。DSP和天线姿态初始化两个模块为系统寻星做准备,在进入卫星信号搜索和跟踪阶段后,系统要不断地完成与HMR3300、GPS的通信和采样信标接收机AGC电平,并将这些信息通过LCD显示或和通过无线模块传输给上位机实时监控。其中天线姿态的初始化和卫星信号的搜索与跟踪均包含信号采集处理、串口通信、液晶显示、无线监控、电机控制五部分。
4 监控系统软件设计
监控分系统的主要任务有:①配置无线模块参数和目标卫星经度;②发送目标卫星的位置数据给下位机控制器,控制器则根据此数据和GPS接收机发送的天线当前所在地的经纬度信息计算天线的方位、俯仰角;③与控制系统通信,通过数据和图形方式显示下位机发送过来的天线的理论方位、俯仰角以及当前方位、俯仰指向,并通过方位、俯仰指向的波形来实时显示控制效果;④发送指令给控制器,远程控制步进电机转动;⑤复位系统。主要工作流程如图6所示。
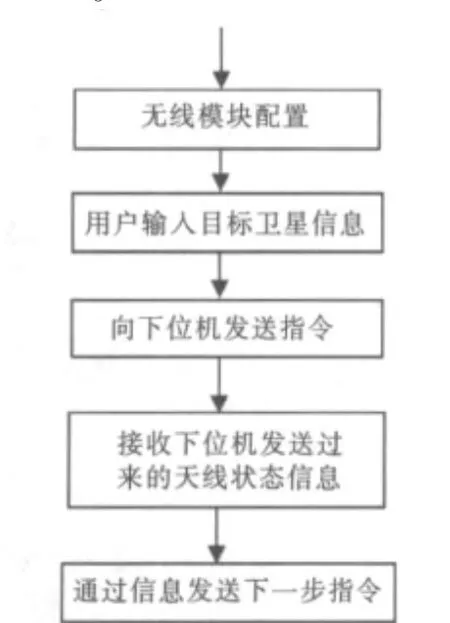
图6 监控系统工作流程Fig.6 Working process of monitoring and control system
5 实验结果
为便于对控制系统性能进行实验和测试,选用亚洲2号广播电视卫星为目标进行试验。系统调试结果通过上位机监控软件实时显示,监控结果表明天线较好地实现了卫星指向控制。
6 结束语
本文以便携式天线卫星通信地球站的研制为背景,研究和设计了基于嵌入式控制器的便携式卫星通信控制系统,分别设计了粗精对准和分区PID控制算法,较好地实现了天线对目标卫星的自动搜索与跟踪,保证天线高精度指向卫星以实现卫星通信。
[1]王丽娜,等.卫星通信系统[M].北京:国防工业出版社,2006.
[2]濮迪,马晶.便携式卫星通信地球站的应用与发展[J].计算机与网络,2006,14.
[3]胡正飞,谢继东.便携式卫星通信地球站结构及其控制系统设计[J].机电产品开发与创新,2006,3.
[4]孙兴邦.卫星天线自动跟踪算法的研究[D].大连海事大学,2008.
[5]彭树生,王洋.车载快速搜索/跟踪卫星的控制系统设计[J].计算机测量与控制,2005,9.
[6]M.Dottlinh,A.Jahn,D.Didascalou,W.Wiesbeek.Two-and-threedimensional ray tracing applied to the land mobile satellite(LMS)propag channel[J].IEEE Antennas and Propagation,2001,6.
[7]张加娟,雷电.车载卫星天线控制系统的研究与设计[J].计算机工程与设计,2007,11.
[8]Tomihiko Yoshida,Kohei Ohata,Masazumi Ueba.Highly Accurate and Cost-effective Auto-tracking Antenna System for Satellite Broadband Communication on Vessels NTI'Technical Review[C].2005,3.
[9]朱敏,沈同圣,周晓东.卫星信号接收天线自动控制系统设计[J].计算机测量与控制,2004,9.
