基于Compax3的光电跟踪伺服控制系统
2013-07-02于丹陈娟王威立梁伟
于丹,陈娟 ,2,王威立 ,梁伟
(1.长春工业大学 电气与电子工程学院,吉林 长春130012; 2.长春光学精密机械与物理研究所 光电对抗部,吉林 长春130033;3.郑州航空工业管理学院机电工程学院,河南 郑州450015; 4.空军航空大学,吉林 长春130022)
1 引言
光电跟踪系统是一种跟踪空间机动目标的现代化测控设备,随着对其捕获跟踪能力要求的不断提高,对其子系统——伺服控制系统控制能力的要求也越来越高,而伺服控制器是伺服控制系统的核心,因此光电跟踪系统对伺服控制器的要求越来越高。 目前国内的伺服控制器主要有基于DSP 和CPLD 构成的伺服控制器和基于工控机PC104 构成的伺服控制器两类。 这两类伺服控制器虽能完成现有大部分任务的基本要求,但是还存在许多缺点。 因此本文将Compax3 伺服控制器应用到光电跟踪伺服控制系统中来提高系统的跟踪精度和增强系统的稳定性。 为工程应用打下基础。
2 光电跟踪伺服系统组成
光电跟踪系统具有方位和俯仰两套独立的跟踪伺服系统,除了方位跟踪系统有正割补偿环节以外,两套系统的结构基本相同[1]。因此本文仅以方位系统为例进行设计。基于Compax3 伺服控制器和300STK 直流无刷直驱伺服电机建立光电跟踪伺服系统转台,其方位系统采用Compax3 伺服控制器。 系统硬件关系图如图1所示。

图1 伺服控制系统硬件关系图Fig.1 The hardware relationship graph of servo control system
光电跟踪系统的跟踪方式主要有电视跟踪、数引跟踪和单杆跟踪。 其中电视自动跟踪是比较常用的跟踪方式[2]。 当跟踪方式为数引跟踪时,Compax3 在相应的伺服控制程序中将采用绝对位置运动模块构成绝对位置运动。 当跟踪方式为单杆跟踪以及电视跟踪时,Compax3 在相应的伺服控制程序中将采用相对位置运动模块构成相对位置运动。
伺服电机和轴系采用直接耦合的连接方式。 轴系上安装了光电轴角编码器,并通过串口将其输出信号直接送到Compax3 中进行读取和处理。 Compax3 和主控机通过串口RS485 进行双向通信,主控机不但能完成Compax3 的程序调试和下载,还能通过接收Compax3 传送来的运行状态进行分析和显示。
3 Compax3 伺服控制器
Compax3 是由Parker 公司生产的高端伺服控制器。Compax3 自带功率放大器,具有模块化设计和参数自整定功能。
Compax3 采用模块化设计,在绝对位置运动模块和相对位置运动模块中,Compax3 伺服控制器采用了电流环、 速度环和位置环3 个闭环回路进行控制。 控制原理如图2所示。 控制器自身带有闭环校正系数自整定功能。 在对基于Compax3 伺服控制器的光电跟踪伺服系统进行设计时,不需要测试被控对象的传递函数。只需运行前对Compax3 进行初始化,Compax3在进行初始化时,电机会转动一下,系统进而能测试出负载的惯量。 控制器根据系统初始化时得到的驱动器和电机参数,并结合负载的惯量得到系统的传递函数,然后根据传递函数生成各个环节的校正系数。

图2 Compax3 位置回路结构图Fig.2 The position loop structure diagram of Compax3
4 基于Compax3 光电跟踪伺服系统设计
4.1 总体设计流程
Compax3 的软件编程基于CoDeSys(可编程逻辑控制PLC 的完整开发环境)。Compax3 会根据跟踪方式的不同采用相应的运动模块,通过编码器读取电机的运动状态并通过串口传送到PC 机中,程序流程图如图3所示。
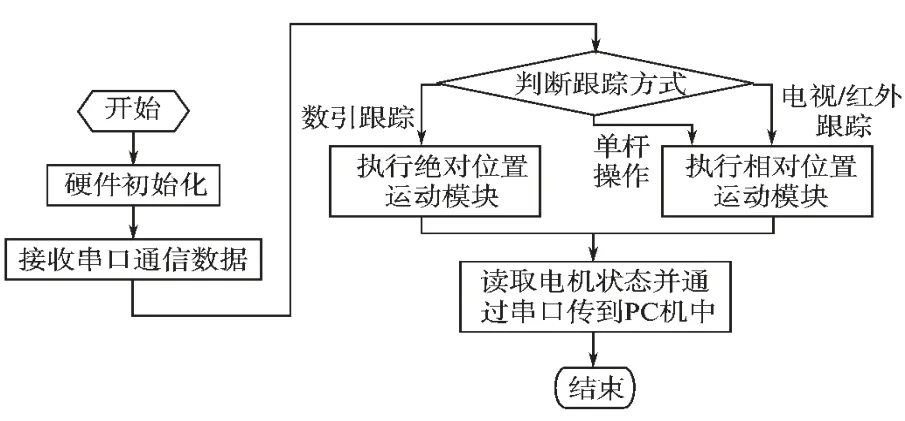
图3 伺服系统程序流程图Fig.3 The program flow diagram of the servo system
4.2 控制器设计
基于Matlab 仿真软件对系统进行仿真设计。 在控制器设计中,跟踪方式采用数引跟踪方式。系统模型依据图2,其中直流电动机参数如下:Ce=0.132 V·min/r,电气时间常数Tl=0.03 s,机电时间常数Tm=0.18 s,电枢回路总电阻R=0.5 Ω,功率放大器放大倍数Ks=40,延迟时间Ts=0.003 7 s。
如图2所示从A 点到B 点为电流开环回路,从A 点到C 点为电流闭环回路,电流控制器采用PI 控制算法将被控对象校正成Ⅰ型系统。经公式计算[3]和仿真验证,电流环校正参数为0.055 7(0.03s+1)/(0.03s)。 从图4a 可以看出,其剪切频率为133 rad/s,相位裕度Pm=63.8°,满足系统稳定要求[4]。 从图4b 可以看出,校正后的电流闭环传递函数可以等效为一个惯性环节,拐点为84.8 rad/s,即电流闭环可等效为1/(0.011 8s+1)。

图4 波特图Fig.4 Bode diagram
速度回路的设计与电流回路基本相同,如图2所示,从D 点到E 点为速度开环回路,从D 点到F 点为速度闭环回路。 电流闭环后等效的惯性环节作为速度开环回路的一部分,速度控制器采用PID 控制算法,校正后的速度回路为Ⅱ型系统,经公式计算和仿真验证,速度环校正参数为40.95(0.059s+1)/s。 其剪切频率为53.5 rad/s,相位裕度Pm=51.2°,满足系统稳定要求。 校正后的速度闭环传递函数可以等效为一个惯性环节,拐点为70.1 rad/s,即速度闭环可等效为1/(0.014 3s+1)。
位置环的设计同理,见图2,从G 点到H 点为位置开环回路,从G 点到I 点为位置闭环回路,速度闭环后等效的惯性环节作为位置开环回路的一部分,位置控制器采用P 控制算法,校正后位置回路为Ⅰ型系统。 经计算和仿真验证,位置环校正参数为18。 其剪切频率为22.9 rad/s,相位裕度Pm=71.1°,满足系统稳定条件。
5 实验与分析
基于某型光电跟踪伺服系统的方位轴进行了数字引导闭环控制跟踪实验,如图1所示。Compax3 伺服控制器为控制核心,完成电流环、速度环和位置环3 个闭环控制,光电轴角编码器用来完成速度,位置反馈。 实验中,当等效正弦输入的最大速度为50(°)/s、最大加速度为30(°)/s2时,实时跟踪误差曲线如图5所示,从图5中可以看出,该实时控制系统具有3.45′的跟踪精度。
当等效正弦输入的最大速度为2(°)/s、 最大加速度为2(°)/s2时,实时跟踪误差曲线如图6所示,从图6中可以看出,该实时控制系统具有0.048′的跟踪精度。 当输入为0.1(°)/s 到0.5(°)/s 的阶跃函数时,该系统的阶跃响应曲线如图7所示,可以看出,系统的调节时间为0.3 s,超调量为15.24%,稳态绝对误差为0.005 5,稳态相对误差为1.31%。
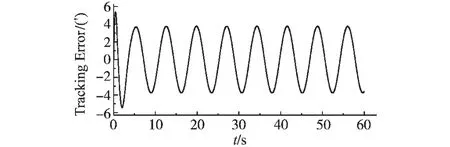
图5 目标速度为50(°)/s,加速度为30(°)/s2 的跟踪误差曲线Fig.5 Tracking error curve of target speed is 50(°)/s,acceleration is 30(°)/s2
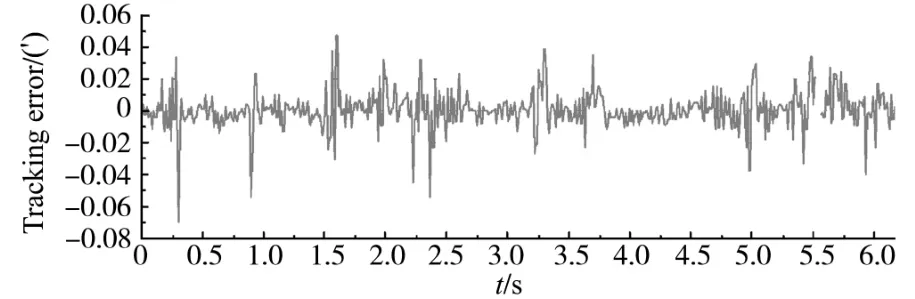
图6 目标速度为2(°)/s,加速度为2(°)/s2 的跟踪误差曲线Fig.6 Tracking error curve of target speed is 2(°)/s,acceleration is 2(°)/s2
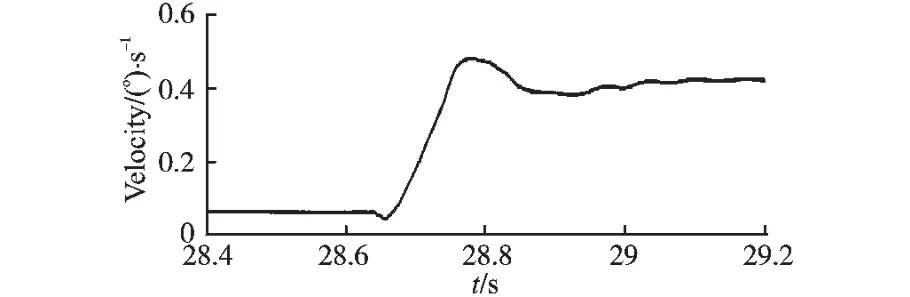
图7 阶跃响应曲线Fig.7 Step response curve
实验结果表明,基于Compax3 的光电跟踪伺服系统在高速和低速的情况下都能稳定运行。
6 结论
本文基于Compax3 伺服控制器建立了一个光电跟踪伺服转动平台,并在此转台上进行了简单的闭环控制跟踪实验,当目标运动最大速度为50(°)/s、最大加速度为30(°)/s2时,该系统的最大跟踪误差为3.45′。 实验结果表明将Compax3 伺服控制器应用到光电跟踪伺服控制系统中能有效提高系统的跟踪精度和增强系统的稳定性。
[1] 王建立.光电经纬仪电视跟踪、捕获快速运动目标技术的研究[D].长春:中国科学院,2003.
[2] 杜杰.基于加速度计的光电伺服跟踪系统前馈控制[D].长春:中国科学院,2011.
[3] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2009.
[4] 胡寿松.自动控制原理[M].北京:科学出版社,2001.