基于位移传感器接触式形状探测装置的设计*
2013-06-28张林仙温沐阳邓彬伟
张林仙,温沐阳,邓彬伟,谭 洪
(湖北理工学院 电气与电子信息工程学院,湖北 黄石 435003)
1 引言
随着科学技术的发展和工业生产水平的提高,许多领域越来越多地提出了对三维工件尺寸和形状参数测量的要求[1]。三坐标测量机是一种集机械、光学、电子、数控技术和计算机技术为一体的大型精密智能化仪器,作为一种通用性强、自动化程度高、高精度测量系统在先进制造技术与科学研究中有极广泛的应用[2]。
三维测量已成为制造业的一项重要技术,它在工业检测、逆向工程等领域占有重要地位。其中,接触式测量是目前使用最为广泛的三维测量方法。笔者专门针对柱状物体设计和实现了基于高精度位移传感器利用三维接触式测量方法来测量柱状物体内壁形状的装置。可有效方便的对柱状物体内壁形状进行实时探测,并通过上位机(PC机)实时绘制内壁形状,如果有缺陷就可实时显露出来,通过试制和实验证明此装置有效可行。
2 系统方案
系统主要由传动行进装置、测头检测装置、信号处理模块以及上位机显示等部分组成。具体来说,系统由STM32F107VCT6控制与数据采集模块、多电机驱动模块、矩阵按键模块、测头(KTRB-50L线性位移传感器)模块、上位机串口数据获取分析与图形实时绘制模块以及相应的外围电路组成。系统整体框图如图1所示。
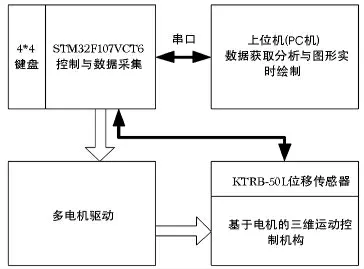
图1 系统整体框图
测头系统通过机械结构与测量主体连接,测头信号连接至STM32F107VCT6控制器然后通过坐标显示系统显示。测头系统通过控制器与测量机其他部分协调配合完成测量任务。实际测量中由于环境条件和筒壁形状的不同,导致测量信号强弱相差较大,因此采用数据拟合处理可达到精确绘制横断面形状的目标[3]。
3 方案选择与论证
3.1 测量方案
三维接触式测量方法由传统的探针式接触测量方法发展而来,目前三坐标测量机是该方法发展的成功典范和主要的使用工具。它以精密机械为基础,综合应用了精密仪器设计、电子技术、计算机技术、软件应用技术和传感技术等高技术成果,能对三维复杂工件的尺寸、形状及其相对位置进行高精度测量。
该系统主要由传动行进装置、测头检测装置、信号处理模块及上位机显示等部分组成。其中测头通过机械结构与测量主体固连,测头信号直接与坐标显示系统相连,测头通过这两部分与测量机其他部分协调配合完成测量任务。实际测量中因环境条件和筒壁形状的不同导致测量信号强弱相差很大,在该情况下很难得到横断面的形状,须进行数据拟合处理。
3.2 STM32F107VCT6控制与数据采集
基于CORTEX 32位体系构架的嵌入式处理性价比很高,被广泛应用于工业生产和各种民用智能产品中。本装置需进行多路数据采集和多电机控制及高速串行通信,因此选择了ARM公司的CORTEX M系列控制器STM32F107VCT6。它集成了各种模块,开发方便,运行稳定,并带有12位高速模数转换器。
3.3 KTRB-50L线性位移传感器模块
设计采用KTRB-50L线性位移传感器。KTR系列位移传感器即电子尺,量程10~100 mm,线性精度达到0.1%,寿命1 000万次,适用于空间狭小安装不方便的场合。-50L型主要技术参数为:电气行程50 mm,电阻±5.0 kΩ,独立线性率0.05(±20%),机械行程57 mm,输出范围为0%~100%V(V为给定电压),分压器模拟输出。此种位移传感器采样无明显跳变、性能稳定、精度高、能满足装置对精度的要求。
3.4 电机模块
(1)方案一 采用普通直流电机:直流电机一般可高速旋转,能取得大的启动转矩,转速高,价格低廉,但存在机械触点,不能完成位置控制。
(2)方案二 采用伺服电机:伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。能提供很好的精度和稳定性,但是伺服电机价格高昂,性价比不高。
(3)方案三 采用步进电机:步进电机扭力较大,转速稳定。如果采用步进电机驱动器不仅可以做到精确控制,而且价格较伺服电机便宜,故采用步进电机。系统最终采用的是42BYG250混合式步进电动机,额定电流为(单相)0.4A DC,额定电压为12 V,步距角为1.8°,可以很好地满足本系统需求。
3.5 电机驱动调速模块
(1)方案一 采用电阻网络的数字电位器调整电动机的电压,从而达到调速的目的。但是电阻网络只能实现有级调速,而数字电阻元件价格比较昂贵。更为重要的问题在于一般电机的电阻很小,但电流很大,分压不仅会降低效率而且实现困难。
(2)方案二 采用由达林顿管组成的H型PWM电路用单片机控制达林顿管使之工作在占空比可调的开关状态,精确调整电机转速。这种电路由于工作在管子的饱和与截止模式下,效率很高;H型电路保证了可简单地实现转速和方向的控制;电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调速技术。
(3)方案三 采用L293D作为驱动芯片,L293D内部集成为双极型H-桥电路,这种双极型脉冲调宽方式有很多优点,但在高速情况下驱动能力相对较弱。
(4)方案四 采用步进电机细分器,考虑到电机使用的步进电机,而且该系统对精度要求较高,本设计采用THB6128步进电机驱动器的二相驱动板。因此采用该方案。
4 硬件和软件流程图设计
4.1 机械设计部分
该机械设计部分由传动行进装置、测头、电机以及底座等部分组成。行进装置由步进电机、滑轮、皮带组成,通过电机控制测量头的行进。与测量头的支杆尾部相连的是另外一个步进电机,该电机可控制侧头旋转,完成对物体内壁的探测。机械结构示意图如图2所示。

图2 机械结构示意图
4.2 上位机程序流程图
通过VB编写上位机软件将STM32控制器采集到的位移传感器及电机动作参数获取,并通过数据拟合算法处理后把数据传到上位机转化为图形实时绘制在显示器上。上位机程序流程图如图3所示。

图3 上位机程序流程图
4.3 软件设计流程
系统运行后,首先进行各模块的初始化,初始化完成后等待装置复位。可通过上位机发送命令给系统,当下位机部分接收到上位机的命令后就进行测量。在测量过程中,下位机适时地将已经测试出物体的形状数据传送给上位机并显示出来。整个系统在运行过程中,可实时观测系统的运行状况。下位机软件流程图如图4所示。

图4 下位机程序流程图
5 结语
测量结果表明能够精确的显示管内壁的凹凸变化,将形状实时显示在电脑上,灵活性强,可实现空间坐标点位测量,方便地测量各种管状物体的内壁轮廓尺寸及位置参数,测量精度高且可靠。计算机的引入,可方便数字运算与程序控制,具有较高的智能化程度。
[1] 桑新柱,吕乃光.三维形状测量方法及发展趋势[J].北京机械工业学院学报(综合版),2001,16(2):32-37.
[2] 张国雄.三坐标测量机[M].天津:天津大学出版社,1999.
[3] 王 霞,曹茂永.桩基钻孔测量仪立体图形显示的实现[J].仪器仪表学报,2001,22(z1):24-25.
