基于Inventor六连杆机械压力机主传动的设计方法
2013-06-28齐齐哈尔二机床集团有限责任公司黑龙江161005余发国
齐齐哈尔二机床(集团)有限责任公司 (黑龙江 161005) 余发国 刘 磊
多连杆压力机是在曲柄压力机的基础上发展而来的,其与曲柄压力机相比具有更好的曲线控制能力,能以较高的效率实现较大行程的拉深,但是由于杆件数的增加,其运动分析的难度也相应加大。在多连杆压力机的设计中,多连杆机构的滑块运动特性是由各杆件的尺寸与相对位置确定的。因为杆件数目较多,所以如何选择各杆件的长度及有关角度、位置参数,借以保证滑块具有符合工艺要求的最佳运动特性,成为设计工作中的关键。
传统确定杆件尺寸的方法一般有图解法与解析法。图解法是利用手工作图的方法,从有限几个方案来确定杆件尺寸。这种设计方法形象、直观,但设计工作量大,精度不高,不能保证机构具有最佳的运动特性。解析法是将机构中已知的尺寸参数和运动变量与未知的运动变量之间的关系用数学式描述出来,列出相应的方程组,用解方程的方法来确定杆件的未知变量。一般情况下所列的方程组是高度非线性的,且由于设计变量和约束条件较多,要直接解出待定参数是很困难的,甚至是不可能的,因此很难获得满足约束条件的最优方案。
本文主要介绍一种基于Inventor三维设计软件的六连杆压力机主传动结构的计算机设计方法。以24MN,1100mm行程六连杆压力机为例,传动结构及零件名称如图1、图2所示。
打开Inventor,在菜单中新建一个standard.ipt文件,新建“草图”,将图1所示传动部分简化为结构简图,省略导套4和导柱5结构,如图2所示。将oa',a'b',b'p,c'a',c'd'按尺寸给出“尺寸约束”,将O点作“固定约束”,d'点与O点作“垂直约束”,p点相对O点作尺寸位置约束,如图3所示。此时,用鼠标拖动a'点绕O点转动,可以看出连杆及偏心轮的运动状态。

图1 六连杆机械压力机杆系结构

图2 六连杆机械压力机杆系机构简图
根据运动状况可知,导柱5运动为上下垂直往返运动,且只有两个点的运动速度为0,也即导柱到达上下死点位置,在此瞬时导柱处于瞬时静止状态,此时可以假设d点为固定点,六连杆机构可以看作由Oacd和Oabp两套四杆机构组成。因此,根据机械原理中的四杆机构速度瞬心的确定方法,可以分别得到两个瞬心,因为ac和ab为同一刚性构件,因此此时这两个瞬心必须重合。利用Oacd和Oabp两套四杆机构中ac和ab杆瞬心重合的特点,可以用作图法快速地得到六连杆压力机杆系的上下死点位置。
根据以上阐述的原理,定义六杆机械压力机导柱在上下死点时,杆cab的瞬心分别为m及m'。首先将连杆3下端拖至接近上端d'点处,如图3所示,新建点m',使用重合约束约束m'点与c'd'、Oa'、b'p同时共线,此时m'即为杆c'a'的瞬心,所有线条将会被完全约束固定; 然后,将Oa',a'b',b'p,c'a',c'd'线段改为构造线。在同一个草图中,重新作结构简图,如图4所示。将线段c'd'与cd、Oa'与Oa、c'a'与ca、a'b'与ab、b'p与bp作等长约束。同理,将连杆3下端拖至接近下端d点处,新建点m,用重合约束约束m与cd、Oa、bp同时共线,此时m即为杆ca的瞬心,所有线条亦将会被完全约束固定。如此求得d点及d'点,即为导柱上下死点位置。

图3
此时将图3中任何一个约束改为联动尺寸,发现简图中杆系不被完全约束,用通用尺寸约束d和d'之间的距离,杆系重新被约束固定。如此,便可按客户需求,利用Inventor草图确定杆系局部尺寸,对待改动尺寸进行微调,即可满足设计需求。同时,可根据结构需要,将每个杆系外形相对杆系进行约束,解放瞬心自由度,拖动a点便可以观察每个杆系外形干涉情况,同时通过运动仿真还可以快速得到导柱的运动曲线是否满足要求,以便及时调整。
这种通过Inventor实现的杆系设计方法,省去了很多通用设计过程中反复计算的麻烦,节省了大量设计时间,不仅方便且对结构是否干涉也能做到一目了然。
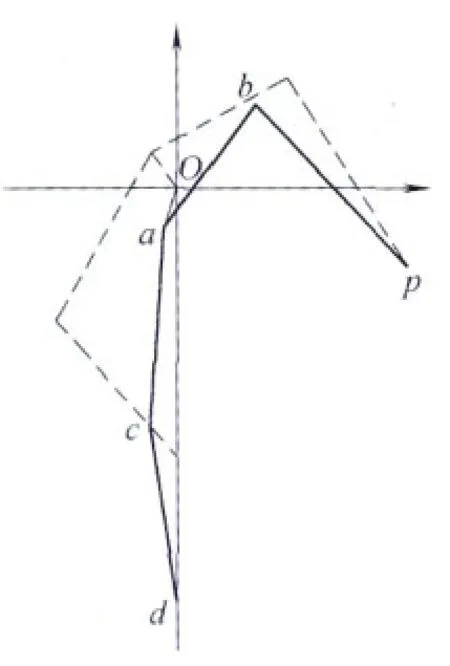
图4
