低空航测技术在城乡规划中的实践和应用
2013-06-26莫龙
莫龙
(余姚市规划测绘设计院,浙江 余姚 315400)
1 引 言
目前运用航测手段获取地表影像资料的方法主要为有人飞机航拍和低空平台航拍两种。有人飞机航拍由于高昂的固定成本费用、起飞条件限制以及航线空域管制较低空飞行严格等诸多的不利因素,在小区域范围内的城乡规划项目中基本无法使用。所以利用机动灵活、成本低廉、快速高效的低空无人机航拍就成为此类业务的最佳选择。本文结合余姚市泗门镇城乡规划航测工程实例进行探讨。
2 测区概况
测区位于余姚市泗门镇,为浙江省首批小城市培育试点镇和宁波市卫星城市建设试点镇,位于余姚市西北的中心,濒临杭州湾,是一座悠久历史和现代文明交相辉映的中心城镇。全镇总面积 66.3 km2,辖16个行政村、4 个社区,常住人口超10 万人。此次作业区域内多为农田和村庄,植被多为榨菜,地势平坦,地形以平原为主,交通便利,乡村道路密布,路面状况良好,来往车辆较少,利于野外作业。
2.1 项目工作量
本项目自2011年2月28日开始,外业工作于2011年5月5日全部结束,完成工作量如下:①完成50 km2低空无人机航片加密和1∶500 地形图测制;②完成50 km21∶500 正射影像制作,涉及正射影像图942 幅。
2.2 主要精度及指标要求
空三加密精度:空三加密成果满足15 cm 的平面中误差;正射影像图(DOM)精度:数字正射影像为24 bit 真彩色影像,分辨率为 0.05 m,像元定位点在像元中心;成图精度指标:
参照1∶500 数字线划图成图精度,平面位置中误差在平原、丘陵地区不得大于 0.15 m,即图上0.3 mm;在山地、高山地区不得大于 0.25 m,即图上0.5 mm。两倍中误差为最大限差;相邻图幅的接边精度:相邻像幅的接边以目视直接判读不得出现明显接边痕迹为主要原则,实现图幅间零接边误差。
3 总体方案
(1)像片控制测量:按照布点方案进行像控点的布设。像控点布设应能满足和 1∶500 地形图测绘以及1∶500 数字正射影像图、1∶500 数字高程模型制作的需要。利用GPS 连续运行参考站VRS 技术及似大地水准面精化技术,采用GPS RTK 测量方法,快速测定像控点的三维空间坐标成果。
(2)无人机低空摄影:根据航拍方案实施摄影作业。
(3)内业数字化测图、正射影像图和数字高程模型制作:利用由张祖勋院士领衔研制的数字摄影测量网格系统(DPGrid)进行生产。该生产线采用改进的影像匹配算法,实现了自动空三、自动DEM 与正射影像生成,自动化程度大大提高。
(4)外业调绘:采用“先内后外”的航测方法进行测图,即先由内业按影像定位测绘,利用自动空三加密软件自动创建立体模型,根据立体模型进行数据采集,生成图形文件,再由外业定性调绘、补测,计算机编辑处理,最终形成数字化地形图(DLG)。根据立体模型、结合地形图资料,编辑并生成数字高程模型(DEM)和数字正射影像图(DOM)。
(5)作业流程
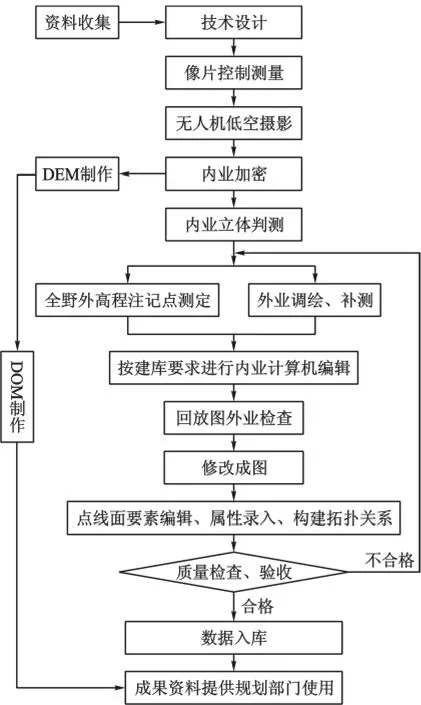
图1 作业流程图
4 无人机低空航拍
采用低空无人机进行了拍摄,飞行高度100 m,获取了全作业区分辨率5 cm 左右的航片10 385 张,像幅为300 m×200 m,覆盖面积约50 km2。

图2 作业区低空摄影架次分布图
(1)采用35 mm 焦距的镜头进行了航拍,在拍摄前进行了相机标定。
(2)根据作业区范围与地形情况进行地面航迹规划,飞机上天后定点曝光。整个航摄区被划分为泗门南作业区与泗门北作业区。其中,泗门北作业区分为4 个架次,泗门南作业区分为3 个架次,如图2所示。
(3)为了减小像点偏移,航拍在选择较短的曝光时间(1/1 250 s)的同时,也将对地飞行时速控制在90 km 左右,以减小像点漂移的影响。
(4)获取的航片图面清晰,色调真实,层次丰富,反差适中,满足后续空三加密、DLG 采集与DOM 制作的需求。
5 空三加密
为了能更快更好地对无人机航片进行空三加密与正射影像图制作,我们在内业处理的过程中引入DPGrid 系统(网络版),通过自动匹配,快速高效地生成了大量高精度、高强度的模型连接点,通过立体刺加像控,采用光束法区域网整体平差获得了加密成果。
5.1 加密流程
空三加密的流程如图3所示。

图3 空三加密流程图
5.2 加密区划分
加密区根据摄影作业架次分为4 个加密区。
5.3 加密要求
(1)内业加密点尽量选在本片和相邻像片影像都清晰、明显、易转刺和量测的目标点上。
(2)尽量保证空三加密区中每一张影像3°重叠区的上、中、下3 个标准点位上有连接点,如图4所示。
(3)加密时,采用外业像片控制测量的检查点进行检核,但不参与整体平差。
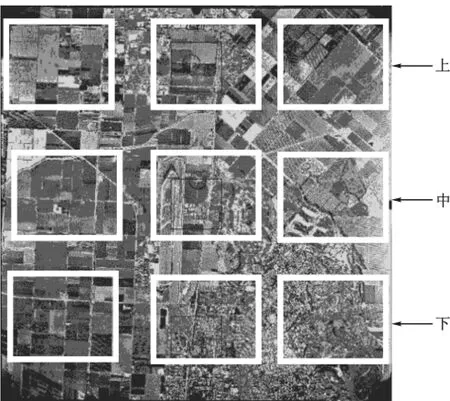
图4 加密点位分布图
5.4 相对定向精度
(1)连接点上下视差
以平地为参照,各加密区模型连接点残余上下视差分别如表1所示。
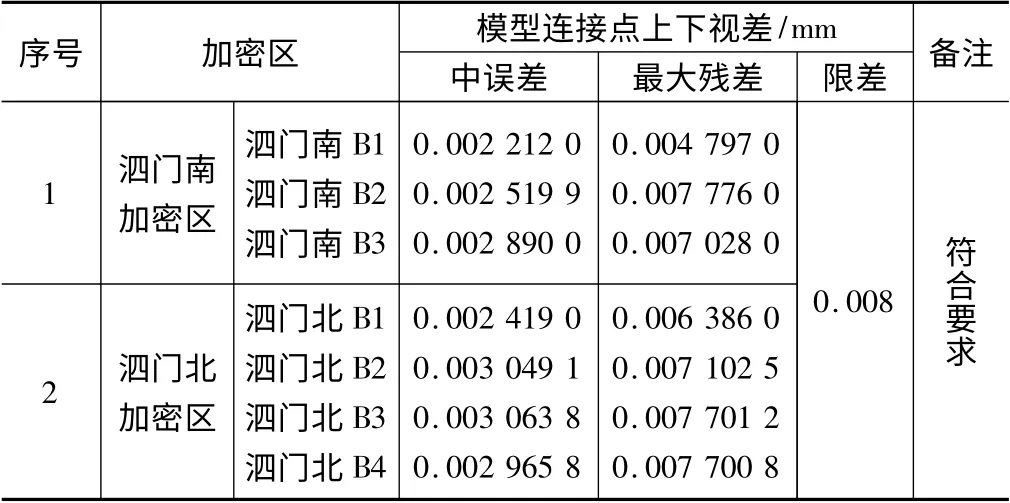
表1 上下视差统计表
由表1可知,模型连接点残余上下视差符合规范规定的要求。
(2)模型连接较差
平面位置较差△S≤0.06×Mp×10-3;高程较差△Z≤0.04×Mp×fk/bp×10-3其中:Mp为航摄比例尺分母,fk为航摄仪焦距,bp为像片基线。式中△S,△Z 以m为单位。
由表2可知,模型连接较差符合规范规定的要求。
(3)绝对定向精度
以平地、丘陵地形为参照,绝对定向后基本定向点残差、多余控制点不符值以及网间公共点较差分别如下所示。
①基本定向点残差
各加密区基本定向点残差如表3所示。

表2 模型连接较差统计表

表3 基本定向点残差统计表
②多余控制点不符值
各加密区多余控制点不符值如表4所示。

表4 多余控制点不符值
6 数字高程模型(DEM)制作
采用了多机网络并行计算的方式进行密集匹配,快速高效地生成大量密集匹配点,然后在立体环境下进行密集匹配点编辑,去除屋顶及树等高出地面地物上的点,再结合地貌特征内插生成0.5 m 间距格网DEM,最后再检查DEM 点与每个模型的吻合情况,对DEM 点与模型不吻合的区域进行了修测,使每个格网点都贴近地表。
7 正射影像(DOM)制作
根据解算得到的外方位元素成果,利用生成的数字高程模型(DEM)及采集的部分DLG 数据,对数字影像数据进行逐片逐像元投影差改正后,经过镶嵌、剪裁,在DPGrid 系统中自动制作成正射影像图。
(1)成图精度指标,
以外业实测的平面坐标为参照,检查泗门南作业区的DOM 平面精度,统计情况如表5所示。
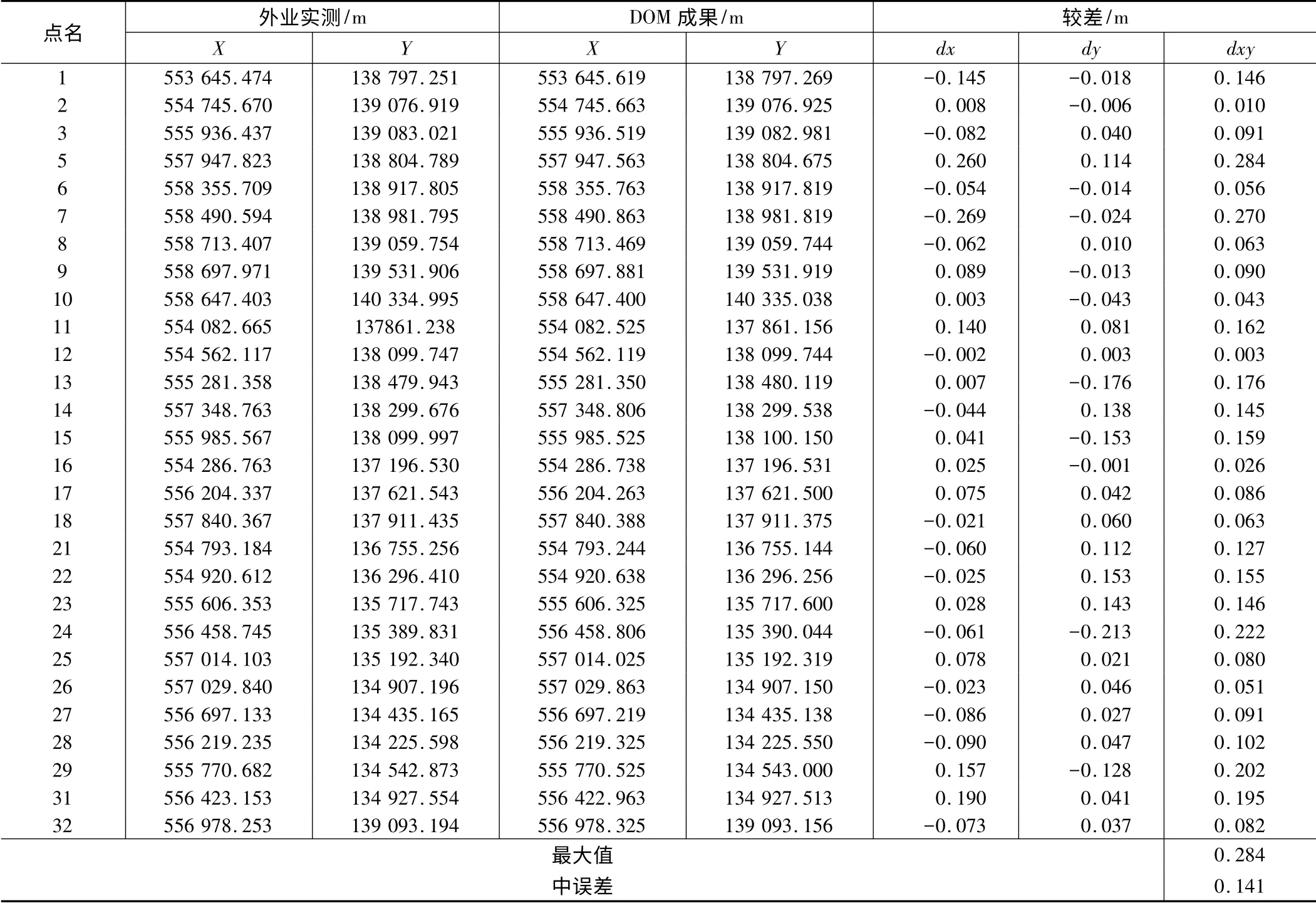
表5 DOM 精度统计表
(2)相邻图幅接边
作业过程为无缝作业,实现了图幅间零接边误差。
8 提交航测成果制作城镇规划图
规划部门利用DOM 正射影像图和大比例尺DLG线划图等航测成果,以此为基础资料制作城镇总体规划图,如图5~图8所示。

图5 内业立体测图

图6 测制DLG 线划图

图7 DOM 正射影像
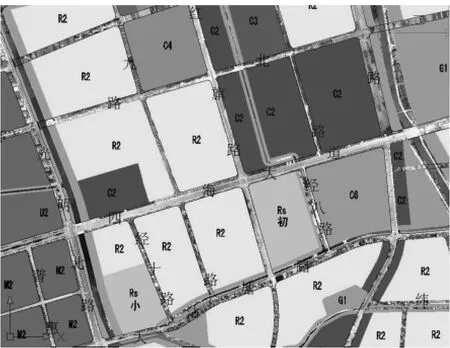
图8 编制总体规划图
9 作业难点与解决方案
(1)单位面积内模型数较多,若采用人工方式添加模型连接点,加密工作量较大。对此,采用了多机、多核网络并行自动匹配的方式,快速高效地生成了大量高精度、高强度的模型连接点。
(2)无人机航片普遍存在畸变较大的问题。对此,利用大量均匀分布的高精度、高强度模型连接点进行平差解算,提高了空三加密成果的精度(大部分片上模型连接点在110 个点以上)。
(3)若只是平面添加像控点,将导致刺加的控制点精度偏低。对此,采用了立体刺加像控方式进行加点。
(4)局部地方控制点不足,采用了外业补测控制点方式。
10 结 语
本项目采用无人机航摄技术快速获取DOM 正射影像图为城乡规划的前期基础性工作的开展赢得宝贵的时间,采用空三成果内业测制大比例尺DLG 线划图相对常规全野外数字化测图,工期大幅度提前,测绘成本更低。其主要优点有:
(1)地形图测制速度快、操作简单,成本低,影像分辨率高,成图精度高,减少外业工作,节省了大量的人力、物力,从而提高了经济效益。
(2)正射影像图提供了大量的信息,以直观、翔实的影像反映了许多实地踏勘中的盲点。同时,利用数字正射影像图作为规划底图,使规划内容与周边环境的关系更加清晰,在旧区改造、历史古建筑保护、城市重点区域和地区标志性建筑的规划设计中可以发挥十分重要的作用。
(3)无人机航拍可以获取多元数据,不仅可为城乡规划、土地、环境、测绘、电力、电信、煤气等部门提供精确、直观、信息丰富、现势性强的基础地理数据,丰富规划、设计、管理的手段与方法,提高管理效率。同时为城市各种地理信息系统提供新型数字测绘产品,充分发挥地理信息系统的作用,为整个城市的建设、规划管理以及经济的发展作出贡献。
[1]万幼川,刘良明,张永军.我国摄影测量与遥感发展探讨[J].测绘通报,2007(1) : 1 ~4.
[2]张祖勋.从数字摄影测量工作站( DPW) 到数字摄影测量网格( DPGrid) [J].武汉大学学报( 信息科学版) ,2007,32(7) : 565 ~572.
[3]孙杰,林宗坚,崔红霞.无人机低空遥感监测系统[J].遥感信息,2003(1) : 49 ~51.
[4]陈玲,潘伯鸣,曹黎云.低空无人机航摄系统在四川地形测绘中的应用[J].城市勘测,2011(5) : 75 ~77.
[5]杜全叶,陆锦忠.无人飞艇低空摄影测量系统及其DOM制作关键技术[J].测绘通报,2010(6) : 41 ~43.
[6]凡亦文,刘全海,高文涛等.无人机航空摄影测量在大比例尺测图中的应用[A].第十七届中国遥感大会摘要集,2010.
