高速公路汽车连环相撞事故预警系统的设计与实现
2013-06-23梁子龙刘守印
梁子龙,徐 伟,谢 芬,刘守印
(华中师范大学 湖北 武汉 430079)
随着经济的发展,我国汽车数量和高速公路里程数逐年增加。高速公路汽车行驶速度速度快、流量大的特点,在给人们带来便利的同时,也因其事故频率高、波及范围广,给人们生命财产造成巨大的安全隐患。
据统计截至2011年底,全国的机动车保有量为2.25亿辆,其中汽车1.06亿辆。2011年我国新增公路通车里程7.14万km,其中新增高速公路1.10万km,截至2011年底,我国高速公路总里程达8.5万km。在汽车和公路数量不断增加的同时,高速公路汽车连环相撞事故也频频发生,例如2011年7月11日,京港澳(京珠)高速公路北行乐昌梅花段发生6车连环追尾交通事故,造成4人死亡、26人受伤。
在诸多交通事故中,高速公路汽车连环相撞事故以其发生频率高、波及车辆多、造成伤害大而显得尤为突出。因此,为了进一步减少此类事故的发生,最大限度地保护人民生命财产不受损失,以新的思路提出基于传感器的事故检测、短距离无线通信与GPRS通信联合预警的设计和实现方案。
1 方案介绍
目前已有的车辆安全预警系统大多基于测距技术。通过红外线、超声波、激光雷达和毫米波雷达等技术可以实现车辆间距离的测量和保持,当车距小于一定阈值时,发出预警信号,或者在自动巡航驾驶系统中,用于车距的保持[1]。另一些新型的基于多车自组网络的蚁群式车辆预警方案,则是通过单车GPS数据获取及多车之间数据交互来实现车辆距离的测量和保持[2]。基于雷达测距的的系统一般成本较高,且易受天气等环境因素影响;而基于GPS数据交互测距的系统通常数据通信量大,网络不稳定,测距可靠性低。针对这些问题及为了进一步减少汽车连环相撞的发生,本文提出了一种新的方案,即先利用传感器进行事故检测,然后在一定区域内实现事故实时播报预警,同时利用GPS[3-9]和GPRS通信方式实现事故定位,以达到事故被及时处理的目的。
汽车连环相撞事故发生的一个主要原因就是驾驶员对事故信息的缺乏,反应时间不足。当前方发生了事故,行驶在后方的车辆不能及时获取该事故信息,从而不能及时采取措施,而导致连环事故的发生。为了减少这种连环相撞事故的发生,本方案采用了下述机制:
如图1所示,当车辆A在行驶中突然发生事故时,车载预警系统能够通过传感器及时检测出发生的事故,并使用短距离无线通信和GPRS两种方式实施报警。首先车辆A通过短距离无线通信的方式向周围车辆发出报警信号,行驶在A车后方的车辆B收到该报警信号后,就可以及时采取措施,避免与A车发生碰撞,同时B车根据收到信息跳数级别来确定是否将自己作为中继,转发该报警信号。这样通过中继转发可以实现更大区域内的事故预警,从而避免连环相撞事故的发生。当车辆A向周围车辆发出预警信号时,它同时会通过GPS和GPRS向公路管理中心发出事故定位、时间等信息,使事故能够得到及时处理,交通得到疏散。
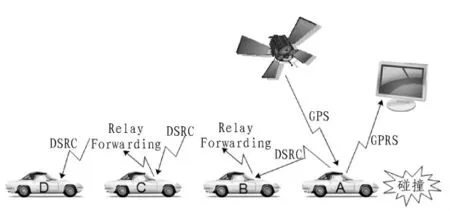
图1 系统功能演示图Fig.1 Diagram of system function demo
2 系统硬件原理设计
本系统采用单片CC2530芯片作为主控制器,它由一个增强型8051核与一个2.4G频段的射频核构成。该增强型8051核与标准的8051核相比速度更快(前者每个指令周期是一个时钟,而后者为12个时钟),数据指针和中断源也相对增多。而2.4G频段的射频核具有16个可选的频率通道,默认采用IEEE802.15.4中规定的调制格式和帧格式,同时它可以进行具备硬件支持的空闲信道评估、帧过滤、帧校验、CSMA/CA处理等操作。它的最远通信距离可以达到100 m左右,加上功放芯片CC2591可以达到1 000 m左右。因此通过中继转发的方式,利用该芯片可以实现几公里范围内的无线信号预警。
系统的事故检测部分由一个三维加速度传感器和一个陀螺仪来完成。加速度传感器LIS3LV02DQ和陀螺仪ITG-3200可以准确测量汽车行驶状态,及时检测车辆侧翻、碰撞、追尾等事故的发生。这些传感器通过IIC总线与主控芯片通信。GPS模块CT-3631采用SIRF star III高性能GPS芯片组,追踪灵敏度达到-159 dBm,它具有20条信道,定位精度达到10 m(2D RMS),当使用WWAS时精度可达到3m(2D RMS)。它能够为系统提供车辆的位置、速度、方向以及事故日期、时间等信息。GSM模块使用华为的EM310来实现,利用标准的AT指令就能够将GPS数据及报警信息通过GPRS的通信方式发送到公路管理中心,实现事故的报告及交通的及时舒缓。
系统的整体硬件框图如图2所示。
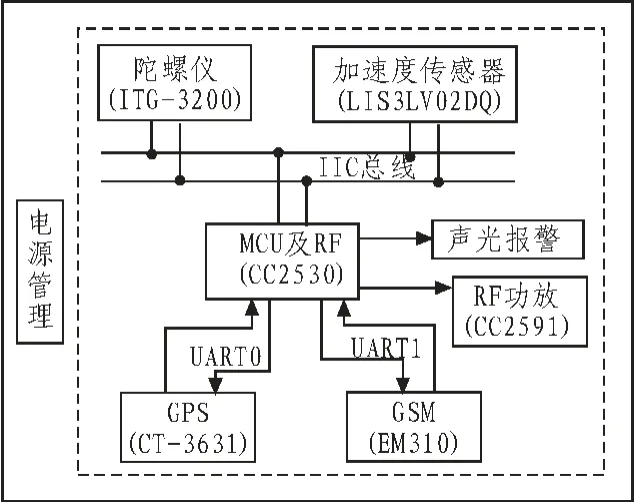
图2 系统硬件框图Fig.2 Block diagram of system hardware
3 系统软件流程设计
系统事故检测是由加速度传感器和陀螺仪来完成的。将加速度传感器和陀螺仪所采集的数据经过校准及滑动窗口滤波后,与车辆行驶状态门限值相比较,来判断车辆所处的状态。系统经过车辆状态的测量,可判断正碰,侧碰,侧翻等事故。如果发生事故,则通过近距离无线通信立即发送报警信号,实现对其他车辆的预警,同时本车通过LED、蜂鸣器等进行声光报警及GPRS报警。当车辆收到其他车辆发送来的报警信号时,立即会发出声光报警,同时根据接收信息中的转发跳数来决定是否作为中继,继续转发该报警信号。对于重复收到已经接收过的转发报警信息,系统将予以过滤,不做处理。由于信道共享,当报警信号转发过程中可能发生信道冲突,程序中采用了CSMA/CA机制,用来进行冲突避免。
系统的简化软件流程图如图3所示。
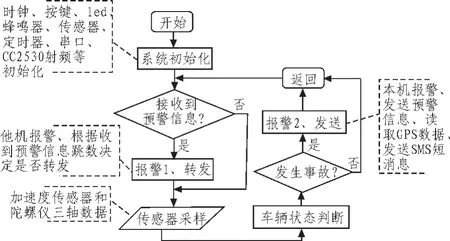
图3 系统程序流程图Fig.3 Flow chart of system software
4 设计实现与测试
图4为系统原型设计的实物图,经过软硬件调试及实际测试,系统能够实现车辆事故的检测、对周围车辆的预警及向公路管理部门的报告事故信息等功能。

图4 系统设计实物图Fig.4 Implementation diagram of system design
由于不同类型的车辆因车辆重量、动力性能、操控性能等因素的不同,事故门限值参数也不尽相同。在限定的实验条件下,笔者采用了最高时速在10 km/h、重量为4 kg的模型车对事故门限进行了相应的测试,并确定软件程序中事故检测的门限值,目前系统可以准确检测出小车正碰、侧碰、侧翻和急速转弯等危险情况。当然对于实际的生产和应用,事故门限值的测试还有待进一步完善。
系统的反应时间是衡量一个预警系统有效性的重要参量,对于本系统的反应时间,根据具体程序执行过程估算,忽略电磁波传输时间,得到最大系统反应时间为5 ms左右,即从前方汽车状态超过事故门限值起,到后面车辆收到该报警信号并发出声光报警的时间。一般车辆追尾碰撞时间约为0.2 s左右,相比系统反应时间有很大的余量,因此系统可以实现事故的实时预警,为驾驶员提供尽可能多的反应时间。
对于短距离无线通信预警,由于信道共享,当两辆汽车同时转发报警信息时,就会发生信道冲突,因此系统引入了CSMA/CA(载波侦听多路访问/冲突避免)机制。对于该机制的测试过程如下:准备一个事故源节点、一个验证节点、三至四个中继节点。将所有中继节点放在源节点和验证节点的中间同一位置,这样当源节点发送报警信息时,中继节点会几乎同时收到该报警信息并同时转发该信息,在将验证节点接收到的数据通过串口传到上位机,可以看到事故源节点地址及此跳的中继节点地址。由于CSMA/CA机制的实现,在验证节点每次都可以正常接收到经过中继节点转发的源节点的报警信息。
另外,经过测试,GPS定位及GSM通信报警均也可以正常实现,测定GPS定位精度在10 m以内(参考谷歌地球坐标),GSM的报警内容包括事故的经度、纬度、时间、日期及事故类型等。
5 结束语
系统主要分为两个方面:事故检测部分和事故预警部分。携带本系统的车辆,在行驶中发生了追尾或侧翻等事故时,系统能够及时检测出车辆事故,通过短距离无线通信和GPRS通信两种方式发出报警信号。一方面使行驶在其后方的车辆及时收到报警信息,采取相应措施,避免连环相撞事故的发生;另一方面通知交通管理部门,及时处理事故,疏散交通。本系统是一种新型多车联合事故预警方案,融合了传感技术、短距离无线通信、GPS技术、GPRS通信等,针对高速公路连环相撞事故有很好的预防效果,其功能满足实际需求,具备可观的市场前景,对于其应用和推广可以进一步加强。
[1]陈勇,黄席樾,杨尚罡.汽车防撞预警系统的研究与发展计[J].计算机仿真,2006,12(23):239-242.CHEN Yong,HUAGN Xi-yue,YANG Shang-gang.Research and development of automotive collision avoidance system[J].Computer Simulation,2006,12(23):239-242.
[2]李智超,罗野.基于蚁群通信机制的高速公路汽车追尾预警系统的研究[J].机床与液压,2007,35(7):158-159.LI Zhi-chao,LUO Ye.Research of early warning system of automobile rear-end in the express way based on ant colony communication principle[J].Machinetool&Hydraulics,2007,35(7):158-159.
[3]李智超.高速公路汽车追尾预警网络MAC算法研究[J].微计算机信息,2010,11(2):155-156.LI Zhi-chao.Research on MAC algorithm of network about early warning system of automobile rear-end in the expressway[J].Microcomputer Information,2010,11(2):155-156.
[4]李缉熙.射频电路与芯片设计要点[M].北京:高等教育出版社,2007.
[5]林洋,黄永和.实用汽车事故鉴定学[M].北京:人民交通出版社,2005.
[6]Akyildiz I F,Vuran M C.Wireless sensor networks[M].A John Wiley and Sons,Ltd,Publication,2010.
[7]Chakkaphong,Suthaputchakun,ZhiliSun.Routing protocol in intervehicle communication systems:a survey[J].IEEE Communications Magazine,2011(10):150-156.
[8]高胜友,吴硕.采用GPS同步技术和电磁感应原理的电缆识别方法[J].陕西电力,2011(9):27-29.GAO Sheng-you,WU Suo.Cable identification based on GPS simultaneous techniques and electromagnetic induction principle[J].Shaanxi Electric Power,2011(9):27-29.
[9]文跃秀,韩宝民,邱灿,等.一种GPS定位技术在绘制10 kV电气线路地理接线图中的应[J].陕西电力,2012(5):22-25,38.WEN Yue-xiu,HAN Bao-min,QIU Can,et al.Application of GPS technology in 10 kV electrical lines geographical wiring diagram[J].Shaanxi Electric Power,2012(5):22-25,38.