车载智能轨道巡检系统的研究与应用
2013-06-21聂海丽上海铁路局科研所
聂海丽 上海铁路局科研所
随着高速铁路的发展,铁路检测设备已经由静态检测发展到动态检测,由接触式检测发展到非接触式检测,由低速运行状态检测发展到高速运行状态检测。目前国外发达国家已成功地将CCD高速摄像技术应用于铁路轨道动态检测,大大提高了轨道检测的速度和精度。
国内近年来也不断引进、消化国外先进的高速轨道检测技术,但国内外轨道检测技术发展较为成熟的还仅仅在对轨道几何尺寸的测量和轨道动力学性能的检测,而对轨道结构病害检测还没有能应用于生产实际的成熟技术。在高铁大规模建设和开通运营的条件下,工务部门亟需采用车载动态非接触方式对轨道结构病害进行检测,本系统就是在这一环境下应运而生的。
1 系统研究的主要内容
车载智能轨道巡检系统是一套集高速数字图像采集、大容量图像数据实时处理和存储、定位技术、智能化和信息化、自动控制于一体的智能系统,能对可视性轨道结构状态进行动态检测。系统分为实时采集和后期分析处理两大部分。
1.1 图像的实时采集和存储
系统通过布置于车底的高速相机阵列,拍摄列车通过高铁线路的整个车底下道床图像,存储于计算机。通过车载系统提供的里程定位信息、车辆速度信息、车辆编码器信息、列车行进方向、上下行等信息,拍摄列车经过线路的轨道图像,包含轨道板裂纹、扣件的缺失甚至松动、钢轨表面的光带、钢轨的擦伤、剥落掉块等所有可视缺陷,经数字化处理后显示于监视器上,最终实现对列车经过的整条线路的检测。
1.2 图像的后期分析和处理
图像采集回来以后,工作人员在办公室对采集的图像通过人机结合的方式进行分析处理。先由自动识别软件对选定的目标图像文件夹进行智能图像分析与缺陷识别,识别出来的缺陷图像将自动放入缺陷库(目前能够自动识别的缺陷主要包括扣件的异常、钢轨的擦伤和剥落掉块、光带的分布不匀等)。然后通过人工辅助分析,判断哪些是现场真实缺陷,哪些是由于线路的油漆痕迹和扣件内的污物等造成的误判,剔除不构成行车安全的缺陷图片,剩下的即是有效的缺陷图片。通过人工回放软件对目前暂时未能实现自动识别的轨道板裂纹、道床的翻浆冒泥等轨道结构病害进行人工预览判断,从而实现了轨道面全覆盖的可视化巡检,为线路的养护维修提供了科学的依据。
2 图像的采集系统
2.1 系统的组成
高速相机和LED光源安装于列车底部,测速触发装置向两个相机发出行触发信号,相机接到触发信号后采集图像,并将图像传回给采集存储系统,由采集存储系统负责将图像进行压缩和存储。如图1所示。

图1 装置构成
系统使用两台相同型号的线阵列相机,通过外出发模式来进行相机的采集控制。相机的分辨率为2k,单个相机视场大小1600mm,工作距离800mm,通过选择适当焦距的镜头,可拍摄物体景深250mm左右。每个相机的视场大小虽然只有1600mm,但两个相机拼在一起的视场超过了2800mm,满足了覆盖整个轨道板面的要求(如图2所示)。对于采集图像的重叠部分,将在回放时由回放软件裁剪掉。
相机长时间不间断采集轨道图像,最高时的频率可达18kHz,在行车速度60km/h的情况下,保证了1mm/线的高精度图像采集。同时,在行车方向上,图像可以连续地进行无缝拼接。

图2 两个相机协同工作原理
光源选择定制型高亮度条形LED。中心的LED对着铁轨,亮度较低;两边LED对着扣件以及轨道板,亮度稍高。由于铁轨比扣件距离相机和光源更近,所以光源亮度做了调整,使得拍摄出的图像亮度更为均匀。
2.2 图像的采集流程
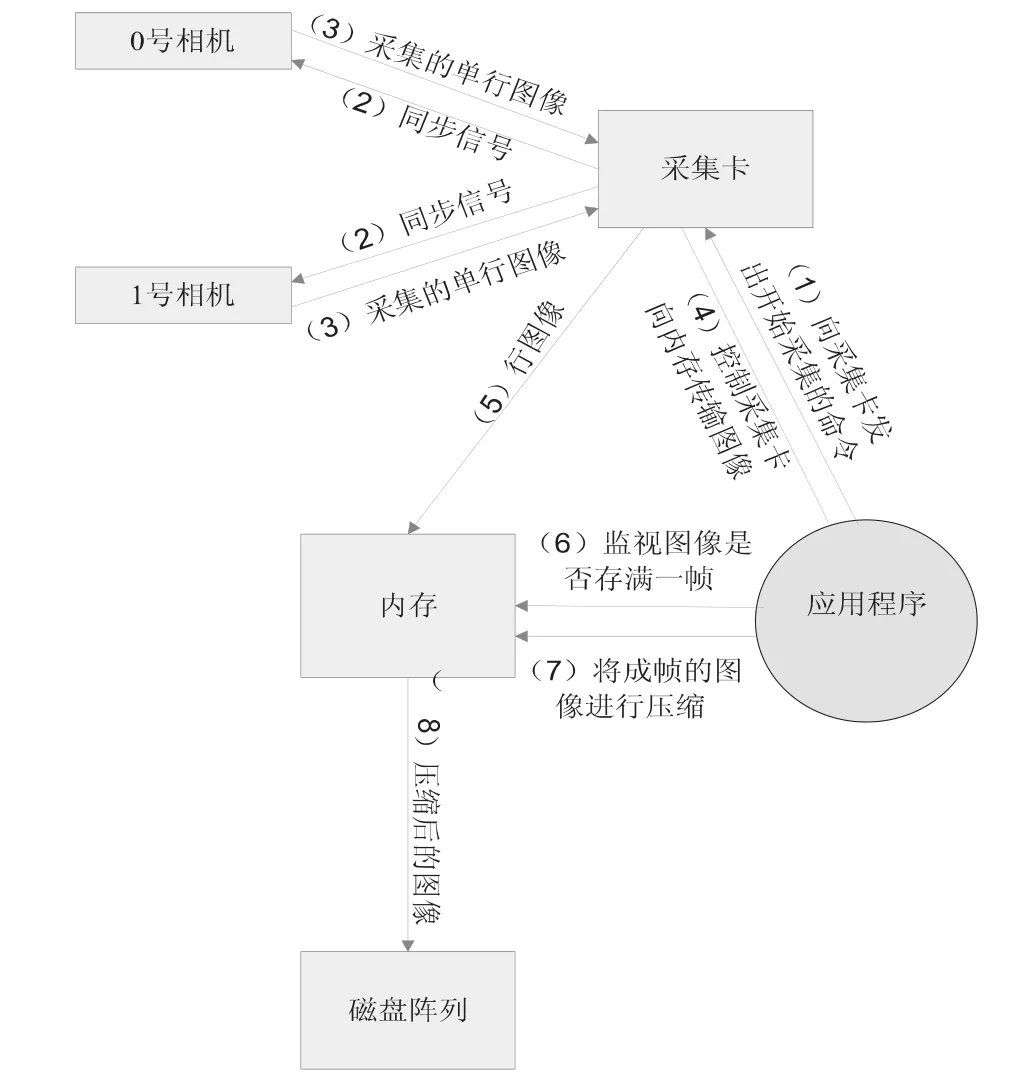
图3 系统工作流程
由行同步编码器发出同步信号触发两台相机采集图像,相机接收触发信号,逐行拍摄,并将拍摄的图像传递给采集卡,通过采集卡的整合发送给采集应用程序。应用程序对采集的图像进行相应的压缩后将图像保存到磁盘阵列存储器中。磁盘阵列在多个磁盘上同时存储和读取数据,保证了大容量图像数据的高速存储。整个工作流程如图3所示。采集界面如图4所示。
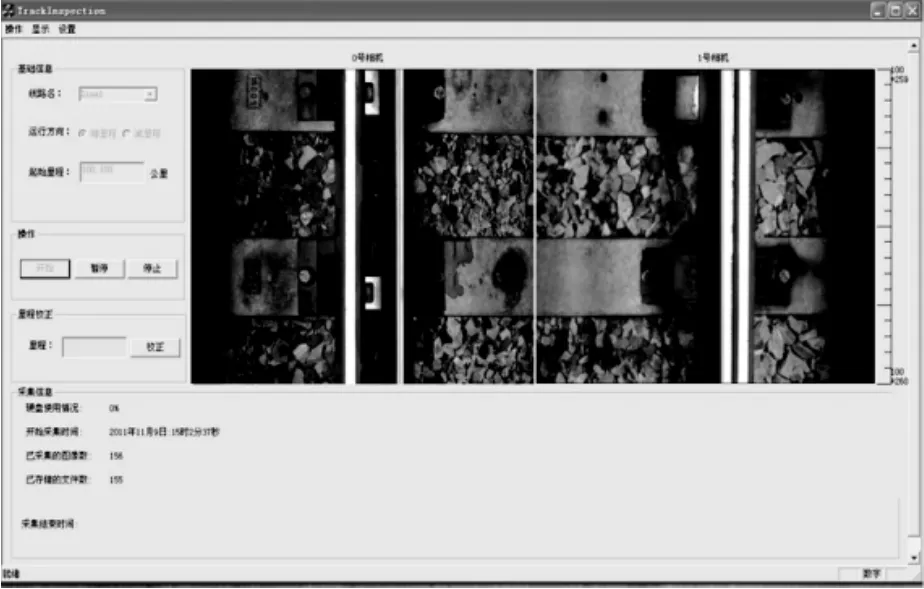
图4 采集界面
3 图像人工回放系统
每次采集的图像和相关的里程信息、线路信息和其它配置信息等统一按照规则存储到图像采集任务包中。回放软件以任务包为单位对采集的图像进行显示,回放人员可以用矩形框标注出所查看到的缺陷,并通过点击下一幅按钮来遍历每一幅图。遍历的过程中可以任意缩放图像,查看之前标注的缺陷,也可以设置时间自动播放。每一幅图像都有相应的里程信息,回放时可以随时通过里程定位查找到相应位置的图像。人工标注好缺陷以后,软件可以按要求查询出缺陷图像及缺陷信息,并可自动生成图文报表,帮助进行巡检。
4 智能识别系统
智能识别系统遍历每一幅图像,靠软件自动识别出相关缺陷,目前本系统主要完成了钢轨光带异常的自动识别和扣件歪斜、缺失等问题的自动识别。
4.1 钢轨光带异常的识别
钢轨光带异常的智能识别主要包括钢轨擦伤、点蚀、腐蚀等缺陷的识别。智能识别系统根据预处理后的图像的灰度变化,利用水平投影和垂直投影的平滑性改变来检测缺陷,正常情况下的投影曲线应是平滑的,如出现波动,则说明光带有缺陷。图像预处理的主要目的是消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割、匹配和识别的可靠性。本系统的预处理过程包括平滑、增强等步骤。而投影是为了有效的提取图像的特征信息。本系统首先对输入图像进行纵向投影,剪切出光带及其周边部分区域。因为光带的灰度值最大,所以纵向投影后对索引矩阵排序后找到最大值就可以找到光带具体位置,再外扩若干像素便可剪切出光带子图。再对这个光带子图进行横向投影,如果光带存在异常,则其横向投影就会出现灰度值陡变的情况,如图5所示。
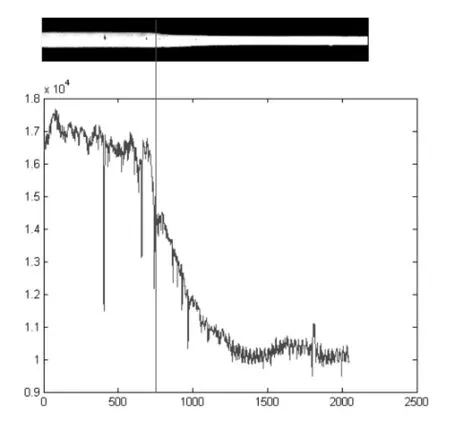
图5 存在异常的光带子图的横向投影效果
4.2 扣件歪斜与缺失的识别
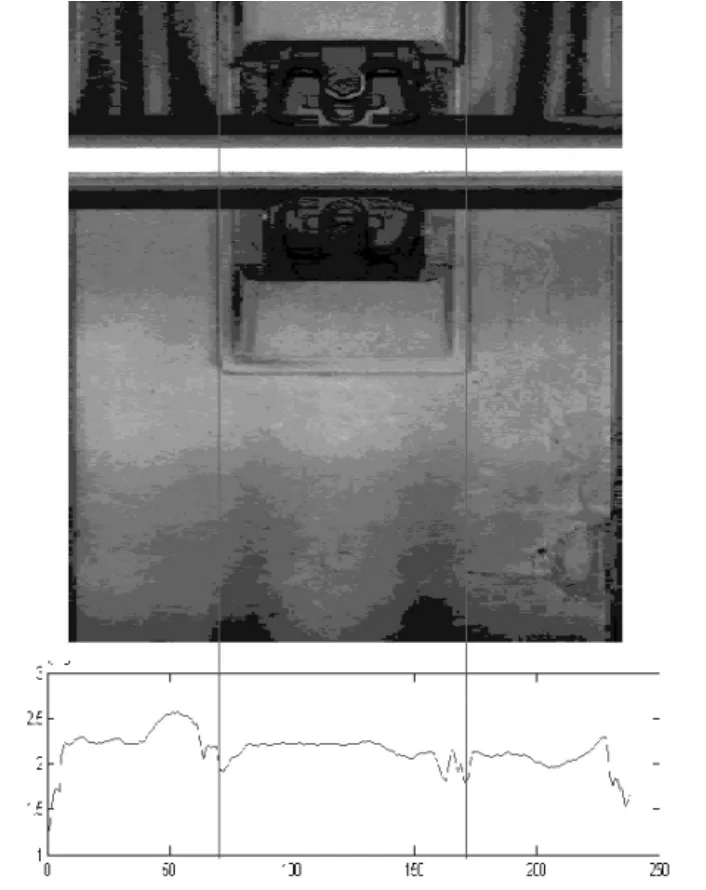
图6 剪切出轨道板子图
智能识别软件根据钢轨的位置从图中分割出扣件区域图,将扣件区域图与模板图像进行比对,从而判断扣件是否存在歪斜与缺失。从整个图像中分割出扣件区域图是非常关键的一部。本系统采用灰度阈值分割法,在确定合适的阈值后,将阈值与像素点的灰度值进行比较和分割,检测灰度级或者结构具有突变的地方,这些地方往往表明一个区域的终结和另一个区域的开始。整个像素比较的过程可以并行进行,分割的结果直接给出扣件区域。区域分割通过两个步骤进行,第一步是通过横向投影,剪切出扣件所在区域的轨道板子图。如图6所示。
再进行纵向投影剪切出扣件区域子图。如图7所示。对于扣件区域子图,与模板图像进行比对,可检测出扣件歪斜与缺失的图像。

图7 剪切出扣件区域子图
5 结论
智能轨道检测系统采用了先进的机器视觉技术,系统的开发思路及技术手段体现出了有效、易用、安全、经济的显著特色。该系统的研制成功,提高了轨道巡检和地面检测数据分析处理的能力。通过数据采集系统和分析系统,合理配置人工资源,能够实现把检测到的缺陷数据及时提供给相应的工务段,进一步提高了对现场指导的准确性和实用性。该系统现在正在投入使用,基本满足需求,但还可以通过增加相机进一步改善拍摄效果,同时通过后续的研究,智能识别的缺陷类型也在不断的增多。相信系统的不断改进将为铁路的安全运营带来更好的保障。