基于Buck电路的超磁致惯性冲击电机电流滞环控制
2013-06-19卢全国
赵 冉,卢全国
(南昌工程学院,江西南昌330099)
0 引 言
超磁致伸缩式惯性冲击电机是一种利用超磁致伸缩材料在变化磁场作用下快速变形而产生的惯性冲击来实现微位移的驱动机构[1]。与传统压电式惯性冲击电机[2]相比,它具有能量密度高、磁-机耦合系数大、带载能力强的优点[3]。由于超磁致伸缩棒的形变受磁场强度控制,其驱动线圈可等效为阻感负载[4],要求其驱动信号为锯齿波电流信号(如图1所示)。因此,超磁致伸缩惯性冲击电机的运动定位精度受驱动电源的电流跟踪控制精度影响。为实现锯齿波电流信号的精确跟踪控制,简化电路结构,本文提出了一种基于Buck变换器的电流滞环控制策略。本文对Buck电路的电流滞环控制工作原理进行了详细分析,对电路的开关工作频率进行分析计算,最后搭建了电源样机进行实验。结果表明,电路具有电流调节线性度高、响应速度快的优点,可满足磁致伸缩式惯性冲击电机的驱动要求。
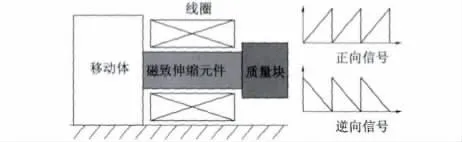
图1 超磁致伸缩惯性冲击电机及其驱动信号
1 工作原理
超磁滞伸缩惯性冲击电机驱动控制原理如图2所示,主电路采用Buck变换器[5],其中Vi为直流输入电压,S为半导体开关,VD续流二极管,L、C分别为滤波电容和滤波电感。惯性冲击电机电路等效模型以电感La和电阻Ra表示。电路同时对输出电流ia、电压Vo进行采样,电流滞环控制器利用所设置的环宽及电流电压采样值进行计算,从而产生开关的PWM 控制信号[6]。
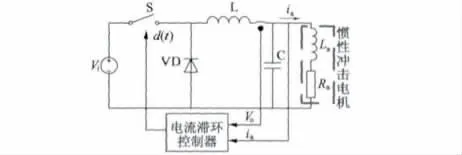
图2 基于Buck电路的滞环电流控制原理
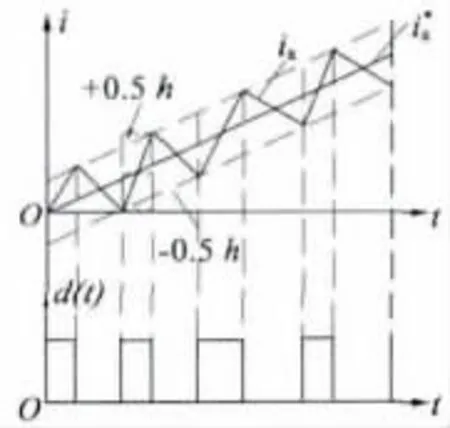
图3 开关工作波形
2 电路工作频率分析
在电流滞环控制下的一个开关周期内,电流的工作波形的几何关系如图4所示,根据文献[7]提供的计算方法,可对电路的开关频率进行计算分析。

图4 电流波形几何关系
AB段:
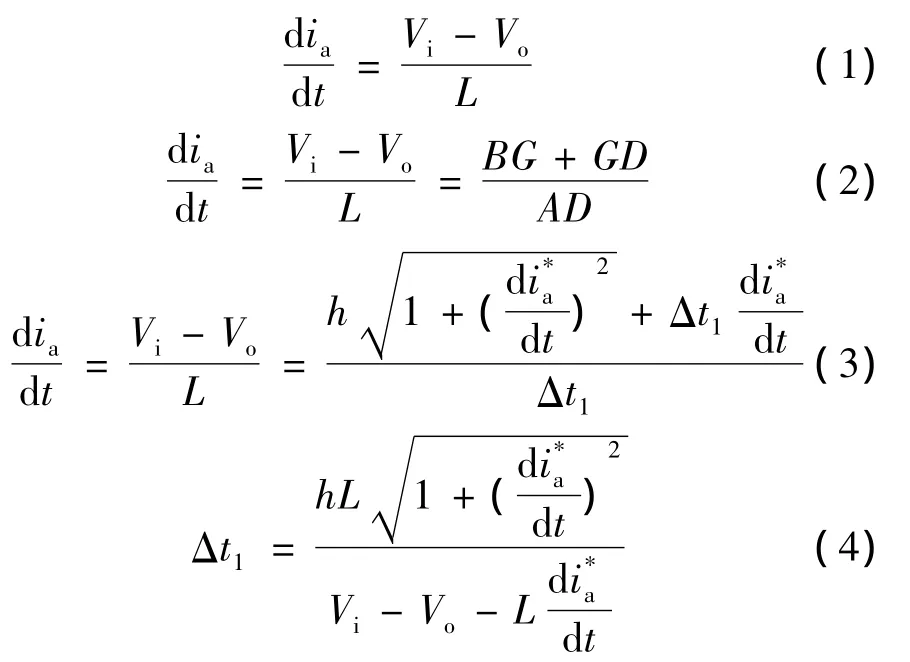
BC段:
已知Buck电路输入输出电压之间的关系为Vo=DVi,代入式(9)可以得到:
由式(9)可得到开关频率最大值:
由式(10)可知,开关频率的最大值与环宽h和给定信号的斜率有关,环宽及给定信号的斜率越小,则开关频率越高。
3 实验结果与分析
输入电压Vi=30 V,开关S采用场效应管IRPF260,续流二级管VD采用MUR1560,电感L=231 μH,滤波电容 C=2.2 μF,惯性冲击电机的等效电感La=19 mH,等效电阻Ra=8 Ω,给定锯齿波信号的频率f=80 Hz,电流滞环环宽h=0.4 A。
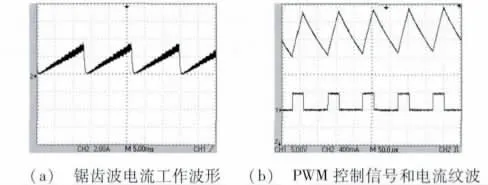
图5 电流工作波形和纹波
图5 (a)为锯齿波电流工作波形,电流Ia幅值为3.8 A,工作频率为80 Hz。由图可知,电流跟踪效果较好,波形畸变小。图5(b)为开关S的PWM控制信号及输出电流纹波,电路开关工作模式符合本文对工作原理的分析,且输出电流纹波较小。
图6 电流谐波分析
4 结 语
针对磁致伸缩惯性冲击电机的驱动控制,本文提出了一种基于Bcuk变换器的电流滞环控制策略,并对电路的开关频率进行了计算分析,最后搭建了一台300 W实验电路。结果证明,采用了电流滞环控制的驱动电源具有电流跟踪效果好、波形畸变小的特点,能够有效提高惯性冲击电机的运动控制精度,且电路结构简单,易于实现。但是,由于采用滞环控制时电路开关频率不固定,造成了电路滤波器设计较为困难,输出电流存在一定的谐波,这是目前采用滞环跟踪控制的不足之处。
[1]卢全国,陈定方,舒亮,等.一种磁致伸缩式惯性冲击微型直线电机[P]:中国,20101061211.2.2010.12.27.
[2]Kim W J,Sadighi A.A novel low - power linear magnetostrictive actuator with local three - phase excitation[J].IEEE/ASME Trasactions on Mechatronics,2011,15(2):299 -307.
[3]卢璇,刘俊标,方光荣.压电双晶片式惯性冲击电机的驱动研究[J].微特电机,2010(12):1 -3.
[4]Goran Engdhal.Hand Book of Giant Magnetostrictive Materials[M].Academic Press,1999:200 -255.
[5]赵冉,卢全国.一种用于磁致伸缩式IDM驱动器的锯齿波驱动电路:中国,201320004391.5[P].2013-07 -15.
[6]程红丽,强新娟,刘健.数字电流滞环控制的Buck-Boost DC/DC 变换器[J].电力电子技术,2010,44(23):56-58.
[7]赵卓鹏,贾石峰.电流滞环跟踪PWM逆变器控制仿真研究[J].电气传动自动化,2011,33(2):1 -3.
[8]陶涛,方光荣,姜楠,等.IDM高性能驱动电源的研究[J].压电与声光,2009,31(2):221-223.
