基于虚拟样机技术的六自由度机械手的仿真分析①
2013-06-14韩明辉
韩明辉, 王 泽
(黑龙江农业职业技术学院,黑龙江佳木斯 154002)
0 引言
本文研究的智能控制的机械手,又叫工业机器人[1~3],被广泛应用到工厂的流水生产线上,代替人类从事焊接、切削、喷涂、搬运等繁重的劳动,在现代化工业生产中发挥着极其重要的作用,在提高生产效率的同时,也极大地提高了生产产品的加工精度和产品质量,可以说工业机器人的应用对工业的发展起到了巨大的推动作用[4].本设计采用了可以简化机械产品的设计开发周期,降低产品开发的设计成本,有效的提高设计产品的可靠性的虚拟样机技术,对操控更加灵活的六自由度机械手进行了Pro/E建模,并且分别采用了ADAMS和ANSYS软件,在计算机仿真环境下对于产品进行了设计和运动仿真和受力仿真的验证分析.虚拟样机技术的优势在于.
1 ADAMS和ANSYS软件概述
ADAMS软件是机械系统动力学自动分析软件,由美国的MDI公司开发,是一款典型的虚拟样机分析软件,它集建模、求解、可视化技术于一体.该软件可以用于测量机械系统的动态性能、运动规律和载荷变化等.ANSYS有限元软件是一个涵盖多个领域的有限元法计算机设计程序,是另一种常用的虚拟样机软件,可以用来求解结构受力和结果变形问题.其中,ADAMS软件比较适合于进行运动特征分析和动态分析,因此本文中对虚拟样机的整体部件进行了ADAMS环境下的运动分析.而ANSYS软件较适合于进行静态分析,因此本文中对于机械手臂的受力最大件,大臂部分进行了受力状况和位移分析.
2 六自由度机械手臂的建模与仿真分析
2.1 机械手臂建模
本研究设计了一种六自由度机械手.此机械手是具有六自由度的空间开链机构,由4个转动关节和5个连杆组成,该机械手的Pro/E[5]三维造型如图1所示.

图1 机械手造型设计
2.2 ADAMS 运动分析
本设计使用ADAMS运动学分析模块对机械手进行正运动学和逆运动学分析,通过给机械臂手部Maker点的一般点运动驱动,让其沿着规则曲线运动,并给Maker点一个力,模拟机械臂加工工件的过程.经过仿真可以测出各个部件在实时运动时所受力的变化曲线.通过观察测量可以求出在临界时刻机械手的各个部件的受力情况.

图2 正运动时的运动状态
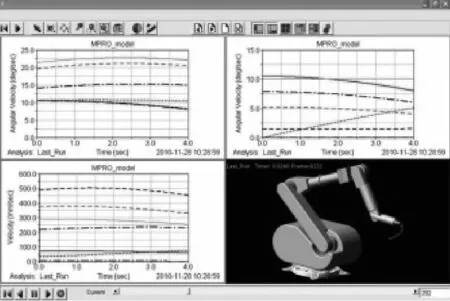
图3 正运动分析
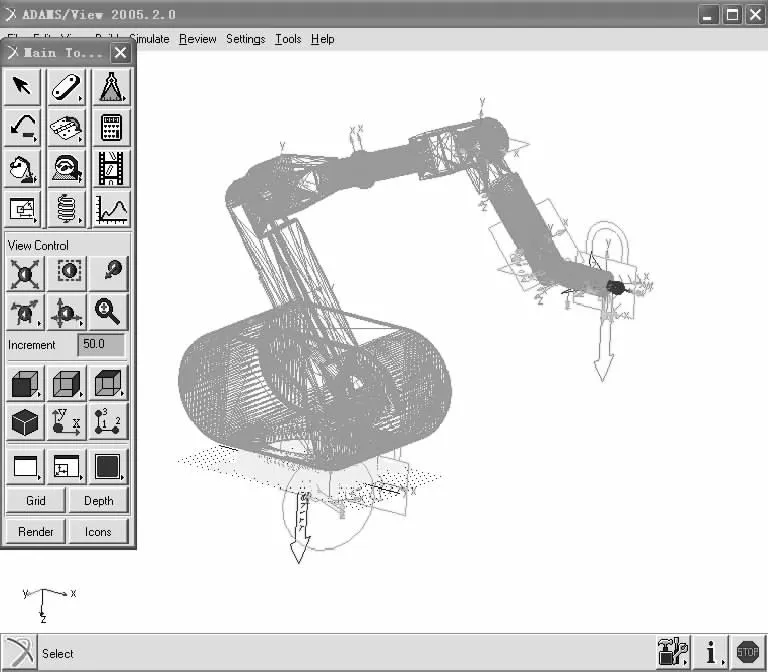
图4 逆运动时的受力状态
正运动学分析的图片(图2和图3)中,可以观察到各个部件在不同时刻的变化情况,呈现出不规则的曲线变化趋势.逆运动学分析的图片(图4和图5)中曲线成周期变化,且仿真运动不产生干涉现象.
正运动分析的结论为机械臂不产生运动干涉现象,且运动平稳,不发生速度突变.逆运动分析的结论为机械臂在1.014秒时为危险时刻,经过测量得出1.014秒时机械臂手部受力最大为7.7142e+006.

图5 逆运动分析
2.3 ANSYS 静力分析
通过ADMAS的分析,得出机械手的大臂为受力最大件,所以为了验证产品的可靠性,我们对此部件做了ANSYS的应力仿真分析.
采用三维建模软件PRO/E建立大臂结构实体模型,将模型导入ANSYS中,从而建立床身的有限元模型.其大臂结构为不规则的空间几何体,设计材料为A3,弹性模量为2.2e11泊松比为0.3.
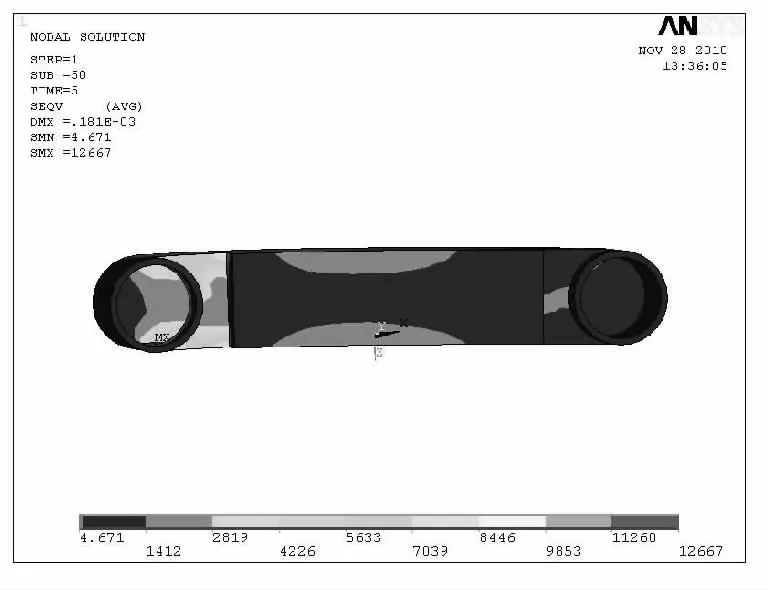
图6 大臂等效应力云图

图7 大臂最大变形分析云图
图6大臂节点等效应力Von mises分布图云可知,大臂部分的等效应力Von mises值在4.671-12667之间,最大应力位置在大臂靠左边处,但此处的应力值远小于于材料的强度极限,其应力集中不会影响大臂的刚度.其设计的安全系数较大,从应力分析角度看,材料抵抗破坏的能力还是有很大潜力的.
从图7大臂结构的总变形Translation USUM可见,最大值为0.18e-3,位于机械臂大臂右边位置.机械手的结构条件能保证加工产品有较高的精度,结构在空间方向的位移有一定的差距,说明在空间结构上刚度分布不均匀,可以通过调整结构类改进刚度合理分布.同时可以看出,机械臂大臂在最大危险应力的作用下的最大变形较小,符合设计需要.
3 结论
在计算机环境下,对于一种先进的六自由度机械手臂进行了虚拟样机的设计,采用Pro/E实体建模技术对机械手臂进行计算机模型的建立,把实体模型导入到ADAMS进行虚拟样机的仿真模拟,并在ANSYS环境下进行关键部件静力分析,模拟结果证实了六自由度机械手臂的设计合理性.虚拟样机技术对于实际产品的优化设计的实现提供了一种快捷有效的方式.为后续数控加工中心的设计制造及投产提供了设计依据.
[1]朱骏.移动机器人操作机械手设计与分析[D].南京:南京理工大学机械制造及其自动化,2006.
[2]张钦国.基于液压驱动的四自由度机械手的运动仿真与优化设计[D].吉林:吉林大学机械电子工程,2011.
[3]马江.六自由度机械臂控制系统设计与运动学仿真[D].北京:北京工业大学模式识别与智能系统,2009.
[4]卢耀祖,郑惠强.机械结构设计[M].上海:同济大学出版社.2004.
[5]杨松涛,颜兵兵.Pro/ENGINEER4.0基础教程[M].北京:北京航空航天大学出版社,2011.
