基于PLC的实验室应用机器人的设计及研制
2013-06-13梁力中
梁力中
(广东医学院附属医院 524001)
1 前言
医学生物实验室需要从事大量与病原微生物相关的实验,这使得实验人员被生物生物病原体感染的风险大大增大,SARS、流感等大规模流行,对传染性疾病的免疫学研究的实验开展,工作接触而感染病毒的报导越来越多,2012年5月,美国一名实验室工作人员死一种脑膜炎病原体,引起世界医学界对实验室感染高度重视。用机器人取代实验人员进行病原微生物的直接的工作接触,成为了生物医学实验室建设的趋势。2012年7月东京的药品贸易展上推出了双臂机器人Mahoro,用于处理危险性实验,该机器人还处于推广阶段,造价较高,安装复杂,维护成本高,不利于我国生物实验室的大范围推广。本文将介绍一种基于PLC的四轴机器人的设计及应用。本设计选择S7-200系列的CPU224来组建四轴搬运机器人的控制系统的核心,扩展EM253位控模块。软件设计部分采用STEP 7-Micro/WIN V4.0软件编写梯形图,为四轴机器人设计了一个简单的人机界面,实现了通过机械手取代人手实现运送、抓取、旋转、放置的功能。应用效果表明,该机器人很大程度地减少工作接触,有效地提升了生物安全,较好地保护了实验室人员的生命安全,取得了预期的效果。
2 系统架构
2.1 机器人结构
四轴机器人用于实验室平台上生物试管的自动搬运,能够完成前后轴X、左右轴Y、上下轴Z、旋转轴四个轴向运动以及抓放动作,其结构如图1所示。X轴向的运动由伺服电机驱动皮带实现,Y轴向的运动由三相异步电机驱动旋转丝杠完成,Z轴向通过一个两位四通换向阀控制气缸完成升降运动,机械手的顺、逆时针90度旋转动作以及机械手抓放动作也分别由两个气缸驱动完成。
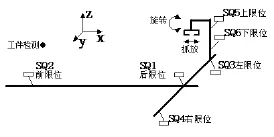
图1
系统启动后,机械手将自动复位到初始位置,即图中所示位置(X轴位于行程开关SQ1处,Y轴位于行程开关SQ3处,Z轴位于行程开关SQ5处,机械手未旋转,抓手张开)。当安装在四轴机器人上的光电检测传感器检测到产品到达后,系统将启动一轮搬运动作。首先,伺服电机启动并带动机械手向工件方向运行,碰触SQ2后则电机停转,机械手顺时针转动90度,接着下降到SQ6处,夹紧工件,再回升至SQ5,接着伺服电机反转带动机械手后退直到碰触SQ1,逆时针回转90度,然后启动Y轴异步电机,通过驱动旋转丝杠带动机械手运行到极限位SQ4,X、Y全都到位后,机械手松开工件,最后,Z向返回SQ5处,Y向返回SQ3处。
3 系统硬件设计
本统的硬件设计包括主电路和控制电路的设计。
3.1 主电路设计
系统主电路如图2所示,系统选用PDSA-0433伺服电机及其驱动器,控制四轴机器人的前进和后退。使用SINAMICS G110变频器控制三相异步交流电动机,驱动四轴机器人的左行和右行。PLC选用S7-200系列的CPU224,并且扩展EM253位控模块用于伺服电机的位置和速度控制。

图2
3.2 控制电路设计
系统控制电路如图3所示。开关量的输入除了X轴的前后限位、Y轴的左右限位、Z轴的上下限位对限位检测之外,还包括系统启动、停止两个按钮检测以及工件到位检测。另外,为了将来扩展X轴方向的位置检测功能,在伺服电机的主轴上安装了编码器,因此将I0.0、I0.1用于编码器脉冲输入。
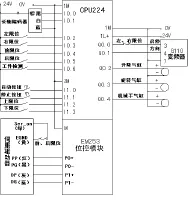
图3
4 系统软件设计
本系统控制面板上设置启动和停止两个按扭。当按下启动按钮。在系统工作过程中的任何时刻按下停止按钮,程序将对程序运行中的所有中间变量清零,使伺服电机和异步电机都停止运行,然后将升降气缸、旋转气缸设成复位状态,抓手则设成夹紧状态,搬运的工件不会掉下来。
5 结束语
机器人技术在现代工业生产领域已应用多年,但是将可控机械手的应用于实验室的尝试却未见有广泛开展,主要是由于大部分科研人员普遍认为实验过程对试剂的精度、控制的稳定性以及操作时间的把握等方面都较之工业生产高,且重复的强度也不如工业生产那么大,没有应用机器人的必要。随着实验室感染发生率的不断攀升以及机器人控制精度、稳定性以及智能化程度的不断提高,为保证生物安全,以病原微生物为主导的医学生物实验室必然会越来越多地使用机器人取代实验室人员直接的接触标本试剂。本研究所开发出的基于PLC的四轴智能控制机器人,虽然在灵活性、准确性方面还有很多提高的空间,但这是机器臂在实验室应用的有益尝试,在我院的斑马鱼神经毒性试验平台的生物实验中,实验人员也开始应用其在隔离的实验室外通过计算机的控制进行危险标本的运送、抓取、旋转、放置等操作,该平台的成本低、易于维护,取得了预期的效果,为将来更完善的机器人研制,更广泛实验室智能机械臂的推广奠定良好的基础。
[1]周乙化,庄辉.实验室感染与生物安全[J],2005,2005,39(3):216.
[2]廖常初.S7-200 PLC编程及应用[M].北京:机械工业出版社 2007.7:185
[3]S7-200可编程控制器系统手册[S].SIEMENS 2005.8:68
