应急车辆作用下的路段交通仿真模型研究
2013-06-10王强华刘小明李颖宏王宗钰
王强华,刘小明,王 文,李颖宏,王宗钰
(1.交通运输部公路科学研究院,北京 100088;2.北方工业大学城市道路智能交通控制技术北京市重点实验室,北京 100041)
0 引言
微观交通流仿真模型作为交通流理论研究的基础组成部分之一,对交通仿真及交通管理控制方法的发展具有重要意义。目前较为典型的微观交通流模型主要包括非线性跟驰模型、元胞自动机模型等[1-5]。在以往的研究中,微观交通流模型构建更多侧重于车辆之间的时空关系,即通过加入驾驶者感知能力、判断力以及理性程度等因素,使其与实际车辆行为更加接近。相对而言,上述模型对特殊车辆(如应急车辆)加入到车流中以后,车辆间相互影响作用关系以及由此产生的交通流特性变化特征等问题还较少提及。在实际交通环境中,应急车辆是一类特殊车辆,主要包括警车、消防车、救护车、工程救险车等执行应急救援服务的车辆。应急车辆的特殊性导致其行为过程与普通车辆有所差异,因此有必要对其进行专门研究,而研究考虑应急车辆的路段交通流模型也将会对应急车辆路径优化、交通管制措施制定等提供有益的指导。
1 模型构建
在路段交通流中,由于应急车辆的加入,车辆的行驶规则较通常状况下会有所变化。根据《中华人民共和国道路交通安全法》中的相关规定,当应急车辆出现在交通流中时,其他车辆需要让行,给予应急车辆优先通行权。基于此,在模型构建过程中,根据车辆属性及其所在车道,将车辆分为四类:应急车辆;与应急车辆不在同一车道的普通车辆;与应急车辆在同一车道但位置处于应急车辆前方的车辆;与应急车辆在同一车道但位置处于应急车辆后方的车辆。以下将根据上述四类车辆分别制定其行为规则,其中的应急车辆影响范围是指对应急车辆声光指示有所响应(具体表现为跟车换道行为的变化)的范围大小,大小用元胞数来表示,其示意图如图1所示。图1中虚线框内为应急车辆影响范围,其中车辆a为应急车辆,车辆c、d为应急车辆影响范围内与应急车辆在同一车道的前车,车辆b为应急车辆影响范围内相邻车道普通车辆。
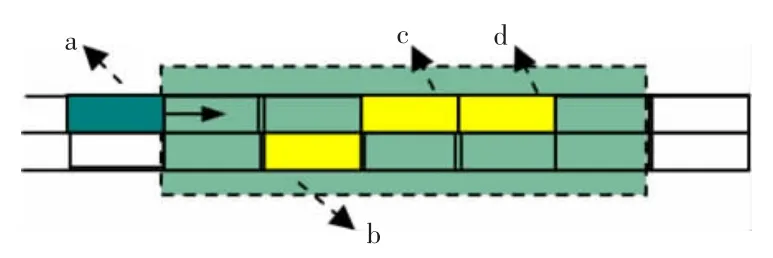
图1 应急车辆影响范围示意图
在本文中取一条道路,将其视为长度为3 150m的离散格点,其中包含两条车道的行车格点,每条车道外侧为停车格点,为简单起见,两类格点间距均为7.5m,每车道被分为420个格点,即L=420。在任一时刻行车格点为空或被一辆车占据。系统采用周期性边界条件,从左向右行驶车辆当驶出右边界后从左边界(如左边界被占据则等待)重新进入,初始时刻车辆随机分布在车道上。普通车辆最大速度为vmax=5,应急车辆最大速度为vmax=6。根据车辆的行为过程,分以下几类情形进行分析:a)车辆在本车道的跟车行驶;b)应急车辆强制换道;c)应急车辆自由换道;d)应急车辆影响范围内仅有一辆车时,与应急车辆在同一车道的前车换道情形;e)应急车辆影响范围内仅有一辆车时,与应急车辆在同一车道的前车不具备换道条件;f)应急车辆响应范围内有n(n>1)辆车时,与应急车辆在同一车道的前车换道情形;g)应急车辆影响范围内相邻车道普通车辆不能换道情形;h)普通车辆在应急车辆影响范围外自由换道的情形。
由于篇幅关系,以下主要对上述车辆行为中的b)、d)、f)进行分析,分别建立其元胞自动机交通行为规则如下(需指出的是,在本车道跟车行驶采用的NS模型,应急车辆由于其特殊性,在本文中的设计不执行随机慢化规则)。
1.1 应急车辆强制换道
考虑到应急车辆的特殊性,当其有换道意图时,普通车辆一般会给予支持,也即相邻车道后车可能会减速以使应急车辆完成换道,但考虑到安全性因素,由于后车最大减速度一般情况下取值为6~8m/s2,因此本文设计应急车辆的强制换道规则如下:
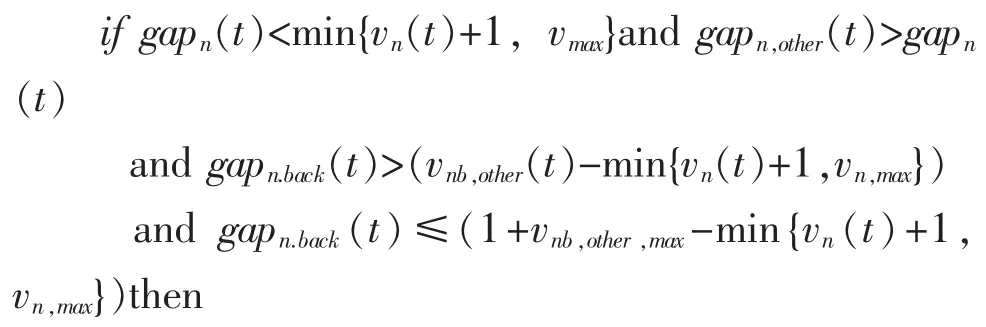
{应急车辆以概率Pm完成强制换道,同时相邻车道后车速度:
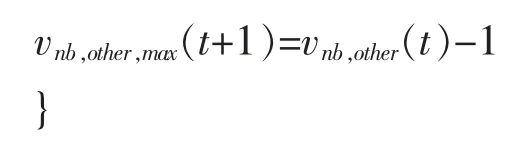
式中,第n辆车为应急车辆,gapn(t)、gapn.other(t)、gapn.back(t)分别为t时刻第n辆车与本车道前方车辆间的距离、t时刻第n辆车与相邻车道前方车辆间的距离、t时刻与第n辆车与相邻车道后方车辆间的距离;gapn(t)<min{vn(t)+1,vn,max}表示第n辆车在原车道受到阻挡,此处的vn,max为应急车辆最大行驶速度;gapn,other(t)>gapn(t)表示应急车辆可以在另一车道上达到更快的速度;vnb,other(t)为相邻车道后车速度,gapn.back(t)>(vnb.other(t)-min{vn(t)+1,vn,max})表示与目标车道后车安全换道间距符合条件(考虑到避免急刹车情况的出现,此处认为后车最大减速度为一个格点(7.5m/s2));gapn.back(t)≤(1+vnb,other,max-min{vn(t)+1,vn,max})表示应急车辆与相邻车道后车之间的距离不足以使应急车辆自由换道,vnb,other,max为应急车辆相邻车道后车最大行驶速度。
1.2 应急车辆影响范围内仅有一辆车时,与应急车辆在同一车道的前车换道情形
应急车辆影响范围内仅有一辆车时,由于受应急车辆的影响,应急车辆前车将根据相邻车道前后车空间、速度等因素考虑是否换道,具体包括以下两种情况。
1.2.1 前车自由换道
考虑到应急车辆的影响,相对于STCA模型来说需进行一些修改,其约束条件更为宽松,即当该车换道至相邻车道后即便速度并无改观,也执行换道行为。
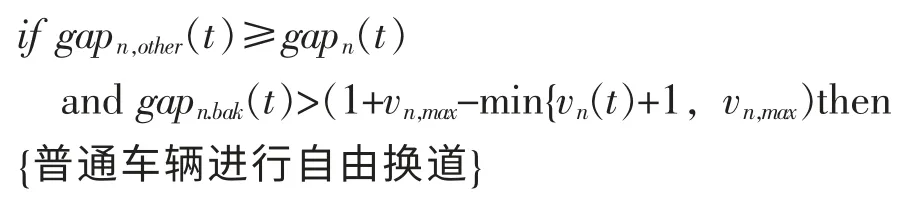
式中,此处第n辆车为普通车辆,gapn(t)、gapn.other(t)、gapn.bak(t)分别为t时刻第n辆车与本车道前方车辆间的距离、t时刻第n辆车与相邻车道前方车辆间的距离、t时刻与第n辆车与相邻车道后方车辆间的距离;vn,max为普通车辆最大行驶速度。
在应急车辆的影响下,此时普通车辆自由换道时有两个特征:a)原车道前车不一定对本车的加速产生阻碍;b)换道后本车速度未必有改观。
1.2.2 前车减速换道
由于受到应急车辆的影响,前车执行换道行为时主要以判断与目标车道后车的距离是否满足安全间距为主,换道后该车辆的速度会降低,换道规则设计如下:

1.3 应急车辆本车道影响范围内n辆车时前车换道情形
应急车辆本车道影响范围内n辆车时,需要首先判断影响范围内本车道车辆数,在此基础上,以与应急车辆最近的前车受影响最大为出发点,依次判断范围内车辆是否满足换道条件,参见规则2.4与2.5,需要指出的是,如应急车辆本车道影响范围内相邻车辆的路段空间映射到相邻车道上,在相邻车道该空间内没有其他车辆,则由于存在时间前后关系,距离应急车辆较远的车辆需首先判断距离应急车辆较近的车辆(本车道后车)是否准备换道,如准备换道,则该车辆的换道条件将受距离应急车辆较近车辆的影响。基于上述分析,本文设计判断流程及相应的规则如下:
a)判断影响范围内第一辆前车C1是否满足换道条件,见规则2.4与2.5;
b)如不满足换道条件,则判断第二辆车C2是否满足换道条件,依次类推直至Cn;
c)如某辆车Ci满足换道条件且执行换道,则判断Ci+1是否满足换道条件时,要考虑Ci换道后的位置、速度影响,情况1为车辆Ci换道后与Ci+1之间路段空间映射到相邻车道上,如该空间内有其他车辆,则直接判断Ci+1是否满足换道条件,情况2为车辆Ci换道后与Ci+1之间路段空间映射到相邻车道上,如该空间内无其他车辆,则判断Ci+1是否满足换道条件时,其在相邻车道上的后车或前车(以Ci换道后位置是否超过Ci+1的位置来判断)为Ci。
2 模拟与分析
模拟时每次的演化时步为10 000步(每个仿真时步对应现实时间1s),为消除初态影响,取后600步运行结果。为了消除随机性对结果的影响,每条件下做10次仿真,其后对10个样本取平均。模拟过程中,根据所处交通条件的变化,车辆将相应地执行前文中描述的元胞自动机交通模型规则。
下文先分析应急车辆在受到前车阻碍执行换道的情况下路段交通流的变化特征。设定pm=0.5、pn=0.5,应急车辆影响响应范围fw分别为10、30和60个格点时,在不同车辆密度ρ情况下,应急车辆与普通车辆平均速度的变化过程。仿真结果如图2所示,从图2可以看出,随着车流密度的增加,应急车辆与普通车辆的平均速度均呈下降趋势,且在密度ρ=0.2~0.7之间时下降较快,应急车辆在路段上行驶的时空情况见图3。此外,在相同影响范围情况下,总体上应急车辆的平均速度要高于普通车辆的平均速度,随着密度的增加,这两类车辆平均速度之间的差值逐渐减小,当密度ρ>0.9之后,两类车辆平均速度已十分接近。且从图3也可以看出,在相同的车流密度下,应急车辆影响范围越大,它所能获得的平均速度越高,其与普通车辆平均速度之间的差值也越大。
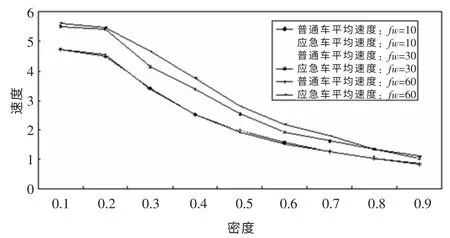
图2 不同fw车辆随交通流密度变化平均速度的变化过程
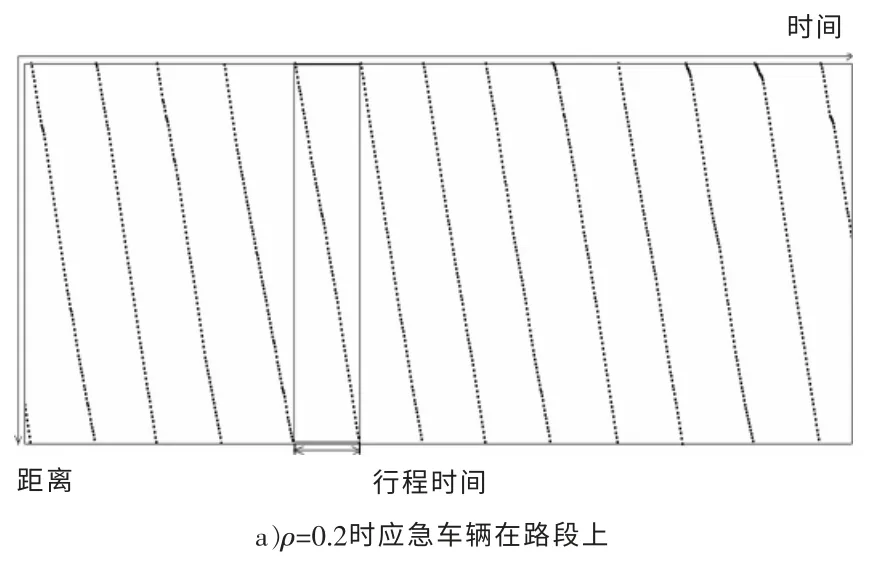
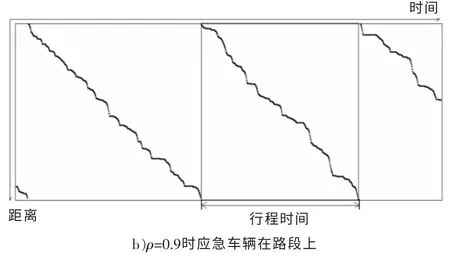
图3 行驶的时空图
图3a)为ρ=0.2、pm=0.5、pn=0.5,fw=10时,应急车辆在路段上行驶的时空图,图3b)为ρ=0.9、pm=0.5、pn=0.5,fw=10时,应急车辆在路段上行驶的时空图。对比这两幅图可以看出,在车流密度较小时(ρ=0.2),应急车辆基本能以最大速度持续向前行驶,此时应急车辆的平均速度较大,路段行程时间较短;当车流密度很大时(ρ=0.9),此时应急车辆在车流中受阻程度严重,以较高速度前进的机会变少且持续时间变短,此时应急车辆平均速度较小,路段行程时间大幅上升。
以下分析应急车辆换道或不换道时对交通流运行速度的影响。图4为应急车辆换道(参数设置为pm=0.5、pn=0.5,fw分别为10、30和60)、应急车辆不换道(参数设置为pm=0、pn=0.5,fw分别为10、30和60)时,不同交通流密度下路段普通车辆平均速度的对比。图5为应急车辆换道(参数设置为fw=10、pm=0.5、pn=0.5)、应急车辆不换道(参数设置为fw=10、pm=0、pn=0.5)时,不同交通流密度下应急车辆平均速度的对比。图6为应急车辆换道(参数设置为fw=60、pm=0.5、pn=0.5)、应急车辆不换道(参数设置为fw=60、pm=0、pn=0.5)时,不同交通流密度下应急车辆平均速度的对比。
从这三幅图中可以看出:首先是无论应急车辆换道与否,在设置的三个影响范围内,随着路段交通流密度的变化,整个路段普通车辆的平均速度变化不大;其次是应急车辆执行换道行为时,其平均速度较不执行换道行为时的平均速度略高,且当影响范围较小时(fw=10),在一个较宽的车流密度范围内(ρ≤=0.7),两种情况下的平均速度差值较明显,而当影响范围较大时(fw=60),在密度较低的情况下(ρ≤=0.3),两种情况下的平均速度差值较明显,之后两种情况下的平均速度已比较接近。这说明当车流密度较小时,应急车辆换道可能性较大,其受前车阻碍程度较小,此时应急车辆影响响应范围对应急车辆的速度影响不大;而当车流密度逐渐变大时,较小的应急车辆响应范围下,前车对应急车辆的阻碍相对较大,此时应急车辆换道对其速度的提高起到一定作用;较大的应急车辆影响响应范围下,前车对应急车辆的阻碍相对较小,加之应急车辆影响响应范围内换道至相邻车道的车辆数相对较多,也导致应急车辆换道的机会变小,此时应急车辆换道与不换道两种行为下的平均速度会比较接近。
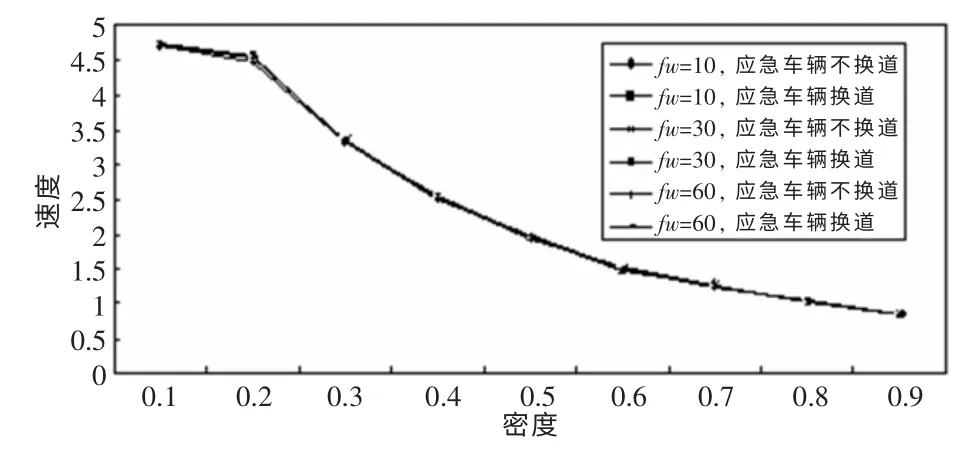
图4 应急车辆执行/不执行换道时普通车辆平均速度变化过程
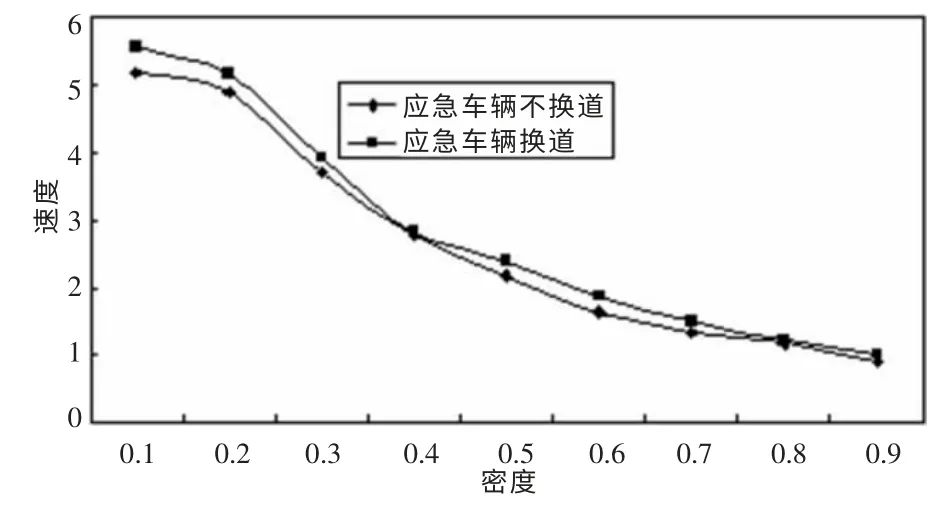
图5 当fw=10应急车辆执行/不执行换道时应急车辆平均速度变化过程
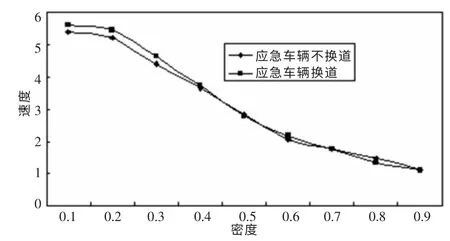
图6 当fw=60应急车辆执行/不执行换道时应急车辆平均速度变化过程
3 结语
应急车辆的特殊性使其行为过程与普通车辆有所差异,因而有应急车辆加入的路段交通流运行特性较以往也有了一定程度上的不同。基于此,本文在对不同车辆属性及相互影响下行为特征分析的基础上,将路段车辆进行分类并分别构建了应急车辆和不同类别普通车辆跟车换道元胞自动机行为规则,进一步通过数值仿真,给出了不同参数设置条件下应急车辆本身及路段交通流交通特性的变化过程。研究结果表明:其一,在相同的车流密度下,应急车辆影响响应范围越大,应急车辆所能获得的平均速度越高,其与普通车辆平均速度之间的差值也越大;其二,无论应急车辆换道与否,在本文设置的三个影响响应范围下,随着路段交通流密度的变化,整个路段普通车辆的平均速度变化不大,也即应急车辆的换道及其影响响应范围对整个路段交通流的平均速度影响不大,而应急车辆执行换道行为时,其平均速度较不执行换道行为时的平均速度略高。上述结论将会对实际交通管理和控制过程中应急车辆路径优化、交通管制措施制定等提供有益的指导。
[1]王涛,高自友,赵小梅.多速度差模型及稳定性分析[J].物理学报,2006,55(2):634-640.
[2]王崇伦,李振龙,陈阳舟,代桂平.考虑换道约束空间的车辆换道模型研究[J].公路交通科技,2012,29(1):121-127.
[3]胡红,刘小明,杨孝宽.基于最小安全间距的应急交通疏散车辆跟驰模型[J].北京工业大学学报,2007,33(10):1070-1074.
[4]陈漩,高自友,赵小梅,贾斌.反馈控制双车道跟驰模型研究[J].物理学报,2007,56(4):2024-2029.
[5]王艳娜,周子力,王新伟.基于元胞自动机的模糊控制换道模型[J].计算机应用,2007,27(5):1197-1200.
