基于矩阵相似度的探地雷达成果图解译技术
2013-06-09孙祥鑫何磊明世祥张连恒马
孙祥鑫何 磊明世祥张连恒马 银
(1.北京科技大学土木与环境工程学院;2.中国华冶科工集团有限公司)
基于矩阵相似度的探地雷达成果图解译技术
孙祥鑫1何 磊2明世祥1张连恒2马 银2
(1.北京科技大学土木与环境工程学院;2.中国华冶科工集团有限公司)
在大量现场解译经验的基础上,发现了雷达成果图与含水量之间的关系,以及不同程度含水情况图像的规律性,基于所有图像都可以用颜色值矩阵表示、矩阵的相似度表示图像相似程度的思想,提出了矩阵相似度判别探地雷达成果图含水程度的方法,运用图像颜色值矩阵提取函数对图像进行了提取,计算了不同类别含水情况的特征矢量中心值,并验证了矩阵相似度在探地雷达成果图解译中的可行性,在实际应用中取得了很好的效果。
探地雷达成果图 矩阵相似度 图像颜色值矩阵 特征矢量中心值
探地雷达作为超前地质预测预报的手段之一,已经在国内外的隧道工程中获得了广泛的应用,但是雷达成果图的解译仍然处于经验解译阶段,主要依靠长期从事探地雷达解译的技术人员进行解读,在此基础上分析掌子面前方含水量情况,这在一定程度上限制了探地雷达的使用和发展,因此亟需找到简单有效的方法,对探地雷达探测成果图进行规范准确的解译,方便现场施工人员解读和使用探地雷达方法。本研究是在长期解译经验的基础上,利用雷达探测成果图与含水量之间的关系,在运用图形处理技术的基础上,提出了基于矩阵相似度的探地雷达成果图解译方法,并取得了较好的实际应用效果。
1 探地雷达技术和矩阵相似度
1.1 探地雷达技术
探地雷达(Ground Penetrating Radar)是一种地下高频—超高频(微波段)电磁波反射定位探测法。根据回波的单程旅行时间和电磁波在相应介质中的传播速度确定目标距离,并通过综合分析判断目标性质。探地雷达的发射天线向地下定向发射高频宽频带电磁波,另一个接收天线或处于接收状态的同一个天线接收来自于地下各种不同介质的界面或目标的反射波。在介质中传播的电磁波,其路径与电磁场强度随所通过的介质的电性、几何形态及尺寸等不同而变化,所接收到的反射回波的幅度、形状及其在纵横向上的展布特征也随之变化。因此,目标性质的识别判定是根据这些波形变化特征并结合地质知识进行的[1]。
1.2 矩阵相似度和相似性判别函数
矩阵相似度,指的是矩阵的相似程度,主要比较矩阵相同位置元素的一致性,相似度值在0到1之间,越接近于1,则矩阵之间的差异越小,反之,则差异越大。
矩阵相似性判别函数

式中,A1,A2,…,As表示s个灰度图像,若相似性判别函数Z(α)越大,则表示图像Ai(i=1,2,…,s)在矢量α上的投影矢量之间的差别越小,反之,则差别越大。当得到每一类别最大的单位矢量后,通过矢量可以得到每一类别图像的特征矢量将待识别图像的特征矢量与每一类的特征矢量中心值进行比较,计算2矢量的距离,距离越小,图像的相似性就越强,可以将其归为同一类。相似性判别函数是抽取图像特征矢量的一种有效准则,它抽取的投影矢量使得同类图像具有最小的差异,并具有较好的稳定性[2-3]。
1.3 基于矩阵相似度的解译方法
所有的图像都可以看作是一个颜色灰度值矩阵,每一个像素位置都是一个颜色值,图片的大小即像素的大小,也就是矩阵的大小。如果2幅图中有一个区域完全一样,那么代表这部分的2个矩阵也是完全一样的;如果某一区域图形近似,那么矩阵也是相似的,通过这一思想,可以根据代表图像的2个矩阵的相似度,来判别图像是否相近。
当分析探地雷达成果图时,如果某一类型的地质构造和含水情况在已知的图像中反映出来,那么待识别的图像如果与这一图像矩阵类似,则新的图像表示的就是相同的地质情况。
通过研究不同不良地质体的波形和频率特征,结合正演模拟和大量的现场实践,发现探地雷达探测生成的波形图分析含水量时有一定的规律,波形图的振幅大小和同向轴错段程度,代表了掌子面前方含水情况的不同。图1显示的是探测时实际的波形图情况,图1(a)表示的是掌子面前方干燥无水的波形图,图1(b)表示的是掌子面前方含少量水时的波形图,图1(c)表示的是掌子面前方含有大量水时的波形图,图1(d)表示的是存在干扰时的波形
图[4-5]。
由图1可以发现含水量的大小与探测得到的成果图有一定的关系,不同含水量图像部分区域的灰度情况不同,得到的灰度矩阵也是不同的,如果将大量的实际图形进行分类,提取相同类别图像的特征矢量中心值,将待识别图像与其进行对比,即可得到待识别图像与不同类别中心的差距,距离最短的即为其对应的类别,这样也就分析出了掌子面前方含水量的不同。
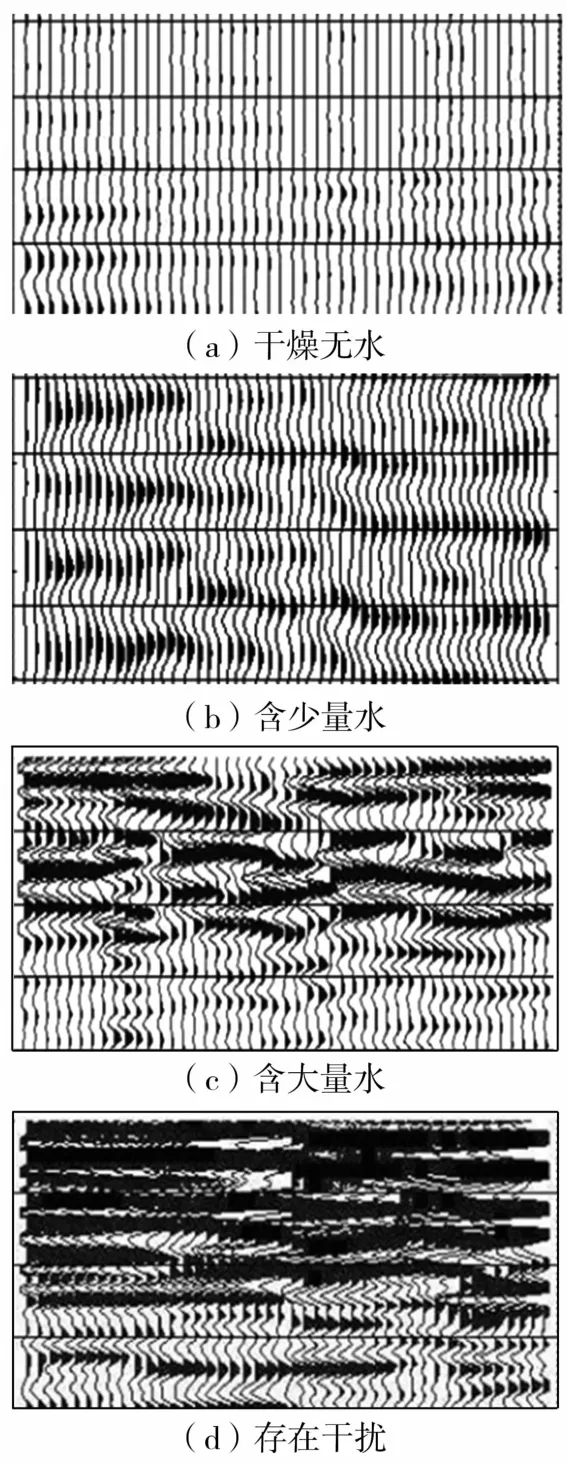
图1 探地雷达探测波形
2 成果图处理和相似度函数的建立
2.1 探地雷达成果图标准化
基于矩阵相似度的识别,其中的矩阵指的是探测成果图的灰度值,所以必须保证图像由RGB转为灰度图像,以及图像大小和波形位置一致,这时就需要对所有得到的图像进行标准化。
首先,必须保证所有的图像都是统一的灰度规范,不采用二值灰度,采用相同颜色值的灰度标准。在提取探地雷达成果图的灰度矩阵时,图像所有像素位置都会有值,而与波形无关的部分不应作为输入向量进行运算,所以标准成果图只需保留图形部分,标题标注和空白部分应予以删除。其次,各个矿山巷道的宽度不尽相同,那么采用探地雷达进行探测时探测的道数会不同,得到的探测图像宽度和高度也不同,本研究采用数据的巷道断面为3.8 m× 3.4 m,探测道数在50道左右,在实际中根据巷道宽度的不同选取不同的探测道数,但是需要保证前后探测道数的一致性,这样通过多次验证得到的特征分类向量才能在之后的探测中运用。再者,探地雷达的探测深度最多能够达到30 m,但是30 m的长度不能作为一个整体的特征矩阵,必须截取代表不同含水量的区域作为特征矢量才能代表不同的类别,通过大量的实践发现,将掌子面探测成果深度方向每隔2 m进行划分,宽度方向采用全宽度,可以获得探测波形变化的全波长,这样相应类型的波形变化就完全包括在矩阵中了。
经过上述处理得到的成果图,宽度400像素、高度650像素,其中宽度400像素代表的是3.8 m,高度650 m像素代表的是掌子面前方延伸长度26 m,将整个图形在高度方向划分为13个区域,每一个区域代表掌子面前方每隔2 m的含水量情况,选择其中具有代表性的数据作为典型类别图像。最终得到的标准成果图,宽度400像素,高度50像素。
2.2 图形特征矢量数据采集
本次创建相似度函数所需要的图形数据全部来自于现场实测,共140个图形,为了保证提取特征矢量数据的有效性,选取图像库中具有典型类别特征的60幅图像,每个图像都经过了标准化处理,得到有效图像500张,将代表相同含水情况的图像归为一类,从中选取每一类别的图像为30个。MATLAB软件中提供的imread函数可以提取图片的灰度值并直接返回矩阵,可以在这一软件中将图像进行处理得到图像的特征矩阵[6-7]。
2.3 图像的识别
此次输出结果分别为干燥无水、前方含水、前方含大量水和图形结果为干扰波4个类别,表示为

其中第i类有N个图像,即

对于第i类的N个图像,从中选择s个图像作为训练样本构造第i类的相似性判别函数Z(αi),即
若B为一个待识别的图像,将它和每类标准图像向量作比较,把它归到距离最接近的一类,具体的识别方法如下[2]。

(8)求图像B的特征矢量¯Yi和第i类特征矢量中心的距离di,

(9)根据距离最小值,判断所属类别:若
选取了4个类别的30个图像后,经过步骤(1)~(6)的处理后,得到每一类别的特征矢量中心,将待识别的图像进行步骤(7)~(9)的处理,即可得到对于不同类别的距离大小,其中距离最小的类别表示待识别图像与其最相似,可以归为一类。
3 实际应用
中关铁矿采用探地雷达进行短距离超前探水预报,在进行了较多的测量验证后,采用矩阵相似度方法对探测得到的成果图进行解译,矩阵相似度方法的识别结果如表1所示。
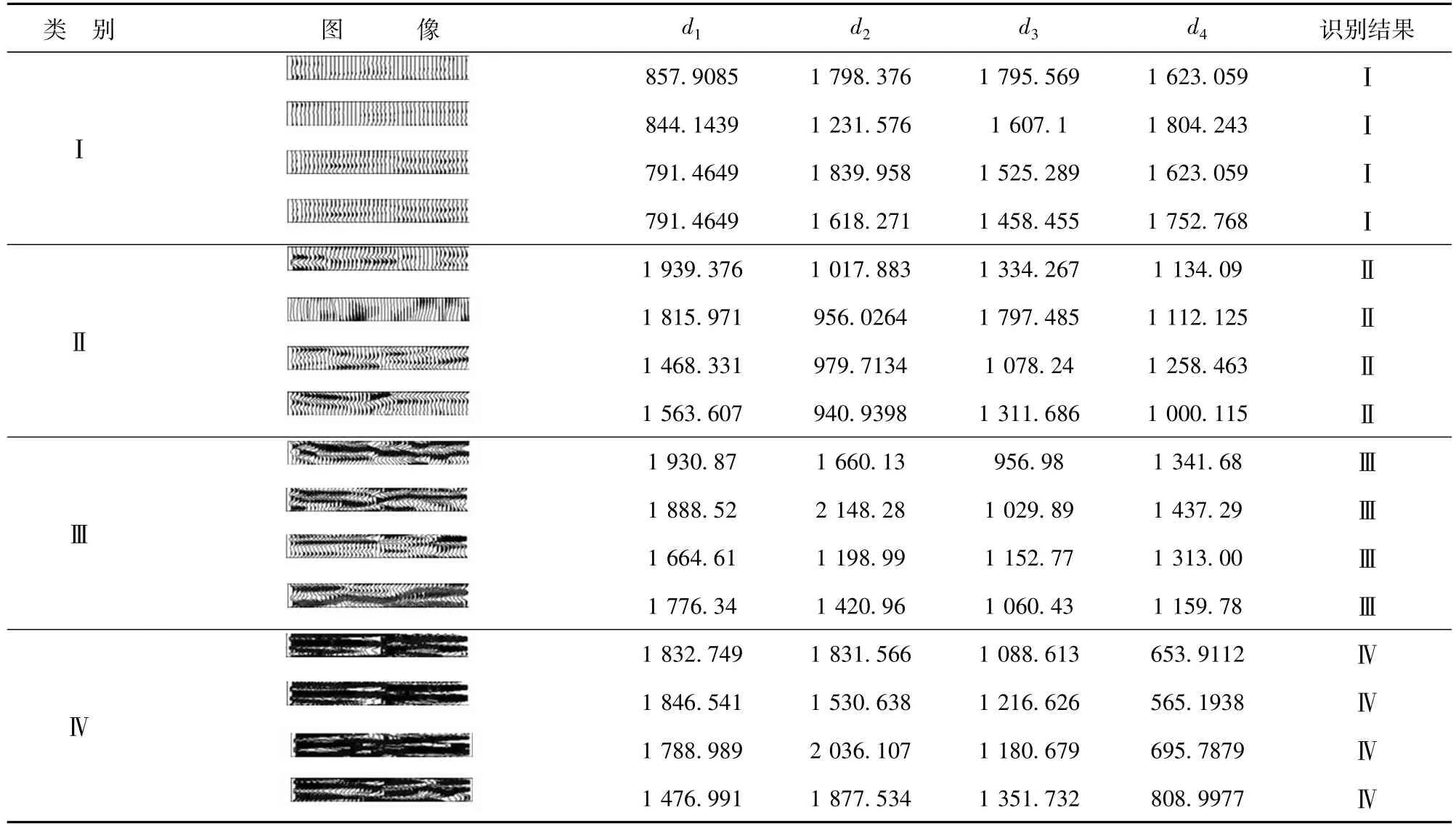
表1 探地雷达成果图矩阵相似度方法识别结果
通过上面每一类别4幅探测图像的识别结果看出,矩阵相似度的方法可以有效地识别不同图像代表的含水量,在大量不同类别实际图像和正确分类的基础上,可以将待识别图像正确的归类,由此可见基于矩阵相似度的探地雷达成果图解译技术是可行的。
4 结 论
在探地雷达成果图解译过程中,发现雷达成果图的振幅、同向轴错段情况与掌子面前面含水状态之间存在一定的联系,而每一张图都可以视为相应位置颜色值构成的矩阵,图像越相似,对应的灰度矩阵的相似度也越大,当对成果图进行标准化处理,并采用imread函数对图像灰度矩阵进行提取,计算得到相同类别的特征矢量中心后,将待识别图像进行分类并验证了这一方法的可行性。目前已成功应用于中关铁矿的施工中,极大地方便了施工人员对探地雷达成果图的解译,取得了很好的实践效果。
[1]孟陆波.公路隧道信息化施工与计算机辅助决策系统研究[D].成都:成都理工大学,2004.
[2]程永清,庄永明,杨静宇.基于矩阵相似度的图象特征抽取和识别[J].计算机研究与发展,1992(11):42-48.
[3]王孝青,党亚民,成英燕.基于矩阵相似度的InSAR图像配准方法研究[J].测绘科学.2008(6):44-46.
[4]彭向阳,张 磊,胡锡炎.矩阵方程AT×A=B的反对称正交反对称最小二乘解[J].工程数学学报,2004(6):93-96.
[5]许 勇.隧道地质灾害超前预报的计算机辅助决策系统开发[D].成都:成都理工大学,2008.
[6]孟陆波.隧道超前地质预报技术与计算机辅助预报系统研究[D].成都:成都理工大学,2009.
[7]丛 爽.面向MATLAB工具箱的神经网络理论与应用[M].3版.合肥:中国科学技术大学出版社,2009.
[8]朱 凯,王正林.精通MATLAB神经网络[M].北京:电子工业出版社,2010.
[9]李大心.探地雷达方法与应用.北京:地质出版社.1994.
[10]曾昭发,刘四新,王者江.探地雷达方法原理及应用[M].北京:科学出版社,2006.
[11]郭付印.探地雷达在隧道超前地质预报中的应用研究[D].广州:华南理工大学,2011.
Ground Penetrating Radar Results Interpretation based on M atrix Sim ilarity
Sun Xiangxin1He Lei2Ming Shixiang1Zhang Lianheng2Ma Yin2
(1.Civil and Environmental Engineering School,University of Science and Technology Beijing;2.China Huaye Group Co.,Ltd.)
Based on lots of experiences of image interpretation,the relationship between the radar image and the water content,and the imagine rule with different water conditions are found out.In the opinion that all the images can be expressed by color valuematrix and the matrix similarity indicates the images'similarity,themethod of classifying the water conditions of ground penetrating radar results bymatrix similarity is put forwards.The color valuematrix is used to extract the image and to calculate the central value of feature vector in different types ofwater condition.Then,the feasibility on the matrix similaritymethod to interprete the ground penetrating radar results is verified with good effect achieved in practical application.
Ground penetrating radar image,Matrix similarity,Image's colormatrix,The central value of feature vector
2013-08-05)
孙祥鑫(1987—),男,硕士研究生,100083北京市海淀区学院路30号。
