数字阵列雷达目标模拟器设计
2013-06-08胡万坤潘瑞云
胡万坤,潘瑞云,沈 磊
(中国船舶重工集团公司第七二四研究所,南京 210003)
0 引言
雷达的发展已进入数字化、阵列化阶段。依据数字阵列雷达目标回波的特点,构建适应雷达系统调试及功能验证需要的目标模拟器已成为雷达系统工程的一项重要研究方向[1]。本文基于数字阵列雷达的实际应用背景,利用大规模集成电路技术、计算机技术、数字信号处理技术构建了在线多目标模拟器[2]。
1 多目标模拟器实现架构
该模拟器的设计以大规模可编程器件FPGA(XC6VSX315T)和嵌入式信号处理器MPC8640D为核心处理器。在系统规划时,充分利用FPGA 芯片内部强大的逻辑资源、乘法器资源、存储器资源、高速串行接口资源(RocketIO、PCIE)、IO 接口资源,在FPGA中实现了阵列雷达多路中频回波数据的模拟;充分利用MPC8640D 多核、低功耗、实时计算能力强、与FPGA及操控计算机互联方便的特点,在PowerPC中实现对多批模拟目标的距离、方位、多普勒、相位、幅度等参数的计算,并将这些参数通过PCIE 传给FPGA。
该架构的设计,使得真实回波数据与模拟目标数据之间无缝链接,共享波控、定时信息、时钟资源,模拟回波与真实回波数据可叠加,共同参与信号处理与数据处理运算。多目标数字中频模拟器的系统框图如图1所示。
2 多目标模拟器的工作流程
2.1 在线多目标模拟器工作过程

图1 多目标数字中频模拟器的系统框图

图2 PowerPC中的程序流程图
显控台通过网络将模拟目标的起始位置、航迹参数、目标批次、目标起伏特性、接收通道的幅相监测数据等发送给多目标模拟器。根据雷达天线波束扫描特点以及目标运动轨迹,PowerPC 进行目标与天线波束的相关性判决。以伺服方位的正北脉冲为基准对发射脉冲进行计数,对天线旋转周期内的雷达工作脉冲进行计数。对落入雷达波束内的目标,计算出每个雷达工作脉冲下的用于信号产生的数据;对雷达波束外的脉冲,所有信号产生的信息置零。以发射脉冲计数器为指针,对天线旋转周期中每个脉冲的信号产生的参数数据进行建表,每个天线旋转周期对应一张映射关系表,该表也对应着产生模拟目标航迹中的一个点迹的所有信息资源。在每个伺服方位正北脉冲的时刻,FPGA 通过PCIE 向PowerPC发送中断请求信号,PowerPC 响应中断后通过DMA方式将表格中数据传给FPGA,FPGA 将数据存入存储器;在DMA 执行完之后,释放中断,并计算下一个天线旋转周期目标点迹的所有信息。FPGA 在每个脉冲重复周期起始时刻从存储器读取信号产生的控制字数据,实现以DDS技术为基础的多路中频数字信号产生。
2.2 PowerPC的计算流程
PowerPC的主要功能包括初始设定、航迹产生、相关判决和信号产生参数计算。PowerPC中的程序流程如图2所示。
根据雷达的波束扫描数据,可知道获得雷达的信号形式(工作频点、脉冲宽度、脉冲重复周期)、天线转速、波束形状等参数;根据雷达操控台设定的模拟目标参数,可知道目标批次、飞行轨迹、目标起伏特性等。由PowerPC 计算出所模拟目标的飞行轨迹,即不同天线旋转周期中各个回波点的距离、方位、仰角等信息。
根据雷达天线机械扫描方位角θ 及水平波束宽度(3 dB),进行目标飞行轨迹与天线波束的相关性判决。对判定落入雷达波束内的目标,PowerPC 根据雷达的信号形式、模拟目标运动的点迹参数、接收通道的幅相监测数据、噪声特性、目标起伏特性、天线波束形状调制特性等数据,确定阵列中多路回波信号的时延、相位差、多普勒频率、回波强度等数据。
2.3 FPGA中多路数字中频回波的实现过程
在雷达工作脉冲的起始阶段,通过存储器读取当前周期产生多路回波所需要时间延迟信息、多普勒调制信息、多通道之间的回波相位信息和多通道之间的回波强度信息。
依据定时关系,在FPGA中产生距离计数器,对产生目标的时间进行控制。由于所产生的每路信号的频率控制字、相位控制字、幅度控制字各不相同,时间关系是同步的,需要在FPGA中实现多个DDS信号产生模块。通过DDS技术,实现在线数字中频回波模拟的原理框图如图3所示。
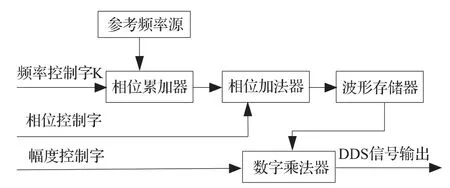
图3 DDS信号产生原理框图
3 目标运动轨迹计算及回波起伏特性分析
3.1 模拟目标航迹规划
模拟目标航迹的设计应参考真实目标飞行情况,应尽可能保证对雷达动态性能和在复杂环境下稳定性的检验。
本设计中的航迹模型包括:(1)民航机的等高飞行,(2)战斗机的机动飞行,(3)两批目标轨迹交叉的模拟,(4)海杂波背景下、低空小目标的模拟,(5)云雨杂波背景下、目标的模拟,(6)高速、高机动飞行目标的模拟(7)航路捷径目标的模拟,(8)400 批目标的模拟。目标的飞行高度、速度、RCS 等可通过操控界面选择。
3.2 距离时延和多普勒频率
目标i 回波信号的时延为

其中,Ri为当前时刻模拟目标的斜距,c为光速。
目标的多普勒调制为

式中,fi,d为目标的多普勒频率,Vi为模拟目标径向速度,fo为雷达工作频率,c为光速。
3.3 阵列天线多接收通道之间回波相位差
第j 路接收信号的模拟相位量为

其中,Øpj(θi,Øi)为传播过程中引起的第j 路接收机接收目标i 回波信号相对于基准支路的相位差,Øaj(θi,Øi)为天馈系统引起的相位误差。一般可将接收通道的测试结果以数据库形式存入多目标模拟器计算机或者进行在线监测。
3.4 回波信号幅度控制
模拟目标i 落入天线波束,第j 路接收机接收的目标i的回波信号强度为[3]

其中,Si,j为第j 路接收机接收第i个目标回波信号功率;Pt为发射信号功率;Gt(θi)、Grj(ϑi)分别为天线发射增益和第j 路子接收机的增益;多目标模拟器将天线静态测试结果量化存储获得天线方向图参数表,供使用时读取;σi为目标反射面积,根据事先确定的目标RCS 平均值与目标起伏模型(如Swerling 模型、瑞利模型等)确定,或将实际目标RCS 存入计算机,根据目标姿态读出;Lj为损耗(馈线损耗及大气损耗等);Ri为目标i的径向距离;λ为雷达工作波长;f(θ,Ø)为天线增益随波束扫描角变化的方向图因子。
3.5 噪声、杂波的模拟及与接收机噪声、杂波背景的叠加
回波信号的模拟还要考虑接收机的噪声和杂波环境的模拟。噪声和杂波都不是确定信号,只具有统计特性。噪声分布类型较多[4](如高斯分布、指数分布、瑞利分布等)。
雷达的杂波环境较为复杂,类型较多,有地杂波、海杂波、云雨杂波、箔条干扰杂波等,不同的杂波类型具有不同的杂波特性。对于地物杂波,可采用幅度概率分布为瑞利分布、对数正态分布、Weibull分布的模型来描述,功率谱为高斯谱、立方谱;海杂波可采用幅度为对数正态分布、K分布的高斯谱杂波模型来表示;气象杂波可采用幅度分布为瑞利分布的高斯谱模型来描述。
噪声的类型、杂波的幅度分布及功率谱模型应根据实际情况来选择。利用计算机产生符合概率分布和功率谱特性要求的随机序列,控制目标噪声和杂波幅度的变化,即依据统计模型产生噪声、杂波回波信号。将产生的噪声、杂波数据存入存储器,利用硬件控制逻辑完成数据的读取[5]。
4 目标模拟效果
图4中,模拟16 批航路捷径目标,用于检验在高仰角情况下目标跟踪的稳定性;图5中,同时产生400批运动目标,用于检验全程、全方位自动起始的能力;图6中,模拟目标与噪声、杂波环境的叠加,进行信号处理抗杂波算法及杂波中目标检测、跟踪算法的验证。
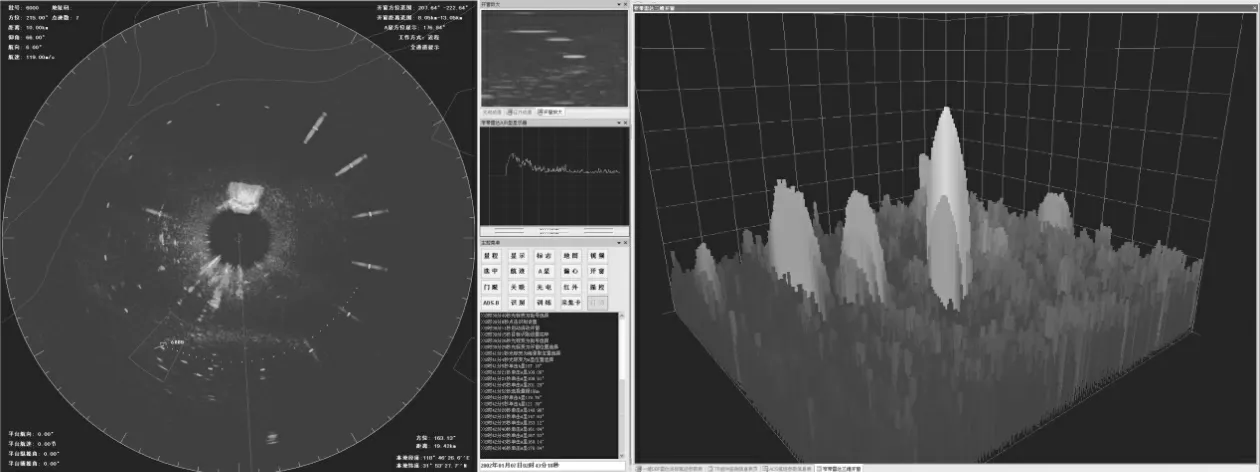
图4 模拟16 批航路捷径目标

图5 模拟400 批运动目标

图6 模拟目标与噪声、杂波环境的叠加
5 结束语
依据阵列雷达的回波特点,多目标模拟器考虑了目标起伏、目标噪声、杂波环境和大气影响等因素,使得所模拟的目标回波比较接近真实情况。模拟目标运动航迹、数量等可随意设置。模拟器与雷达系统之间无缝链接,共享系统时钟和波控信息,所模拟的目标回波与雷达信号之间保持相参关系。多目标模拟器在数字阵列雷达中的应用,使得整机调试与性能验证变得十分便捷、高效,可降低试验条件与成本,对雷达操作人员的培训也具有积极意义。
[1]卫健,陈定阶.雷达目标模拟器[J].现代雷达,2000(2).
[2]徐安林.在线注入式相控阵雷达目标模拟器关键技术研究[D].南京理工大学硕士论文,2009.
[3]丁鹭飞,耿福录.雷达原理[M].西安:西安电子科技大学出版社,2010.
[4]张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2006.
[5]张维刚,陈勇,朱晓东.相控阵雷达多目标模拟器总体技术[J].航天电子对抗,22(5).
