基于隶属度和贝叶斯分类的机场目标分类研究
2013-06-08靳俊峰田明辉
靳俊峰,方 青,田明辉
(中国电子科技集团公司第三十八研究所,合肥 230088)
0 引言
近几十年来,随着航空运输业的飞速发展,各大机场飞机起降次数迅猛增长,传统的塔台管制员人工监视方法无法满足机场场面监视和交通管理要求。高级场面移动引导和控制系统(A-SMGCS)[1]应运而生。该系统能够完成地面运动规划、引导、监视和交通冲突监视,在各种气象和环境条件下都支持飞机和车辆安全、有序、迅速的移动。
场面监视雷达[2](Surface Movement Radar,SMR)是A-SMGCS 系统自动监视功能的关键数据源。SMR区别于其他雷达传感器的关键特征就是它的高分辨率(距离3 m,方位0.3°),目标的回波信号会在距离和方位上扩展形成一幅移动目标图像,可以提取位置信息和结构信息。
目前,国外关于SMR 目标分类方面的研究工作[3]主要思路为:在已知机场目标分类的先验分布和属性向量时,采用贝叶斯准则对每个属性估计器来进行更新,从而得到每个目标归属于每个分类的概率。国内尚无SMR 目标分类研究,相关工作主要集中在基于雷达回波信号特征分类、辐射源分类、红外目标分类等,但这些分类技术均无法应用于SMR 目标分类[4-7]。
考虑用于目标分类的主要特征是目标的结构信息(面积、长度、宽度等)和目标的运动信息(速度、加速度等)。结构信息可以从目标图像中获取,运动信息从目标航迹中得到,此处不展开叙述。本文提出了基于隶属度和贝叶斯分类的目标分类算法,首先利用柯西分布函数得出各特征值的隶属度,然后采用贝叶斯分类方法得到特征向量的概率向量,在此基础上构造隶属度决策矩阵;最后使用加权平均综合评判函数对目标测量值进行分类,分类结果迭代用于下一次计算。仿真结果证明了算法的正确性和有效性。
1 贝叶斯分类与决策矩阵
1.1 贝叶斯分类简介
贝叶斯分类[8]是一种基于贝叶斯定理的统计学分类方法,如果所需的先验信息已知,且条件概率可以获得,那么贝叶斯分类适合用来迭代表示离散时间点上的特征间关系。假设机场目标分类的先验分布和特征向量已知,分类概率可以根据贝叶斯准则来进行更新。假设时刻tk目标的特征向量为X[k],目标隶属于分类Cj的概率估计定义为

式中,Pk(Cj)为目标在时刻tk属于分类Cj的先验概率估计,P(X[k]|Cj)为给定分类Cj时X[k]属于分类Cj的概率。在迭代机制中,一旦更新了Pk(Cj| X[k]),该值就成为用于下一次特征向量获取时新的先验概率P(Cj)。此处不考虑分类间的变迁且假设分类是平稳的,因此在假设每个目标分类的估计概率为Pk(Cj)=Pk(Cj|X[k])时,贝叶斯准则可以迭代用于新特征向量的处理。
定义目标属于分类Cj的条件概率为特征变量构成的概率向量Pk(X[k]|Cj),即

1.2 柯西分布函数简介
由于机场目标的各个特征变量都是连续型的因素变量,可以根据经验选择用柯西型分布函数。假设特征变量是正态分布模糊集,测量值X[k]的第i个特征参数xi对分类Cj的隶属函数为




1.3 基于后验概率的决策矩阵
根据公式(4)的关联概率向量可以构造决策矩阵:

其中,uij=Pk(Cj|xi),m 表示特征数,n 表示类别数。决策矩阵U 满足如下归一化、独立性和兼容性的条件:
(1)uij∈[0,1],表示第i个特征参数xi关联到分类Cj的概率,已经进行了归一化;
(2)uij和upq互不相关(i≠p,且j≠q),表示任一隶属度的改变,不影响另一隶属度;
(3)当增加一个新的可用来衡量目标的特征参数时,可以只根据新目标的特性和相应的特征参数建立相应的评判函数。
2 熵值分析法
权矩阵体现了各个观测特征对目标类别的支持大小。权重值可由先验知识得到,但在先验知识很难得到的情况下,可采用熵值分析法来确定。权矩阵W 可以表示为

对于第i类模式的目标分类问题,已提取的特征参数共有m个。对每个特征参数Fj(j=1,2,…,m ),将其对应的分布区间分为相等的L 段,记为rk(j ),k=1,2,…,L。这里的分布区间是指第i类模式最大可能的参数分布区间,则满足Fj∈rk(j )的样本属于第i类的概率为

式中,Nk(j)为满足Fj∈rk(j)的样本数,Nki(j)为Nk(j)中属于第i类的样本数,则有

设Pk(j)为一个样本满足Fj∈rk(j)的概率,则有


这样,定义特征参数Fj的熵值为

根据该函数的性质,熵值H (Fj)越小,各类模式在特征Fj上的类间分离性越大,则特性Fj对分类的贡献越大,即在识别过程中的权重越大。如果Fj∈rk(j )所有的样本都属于同一类,则有H (Fj)=0。在得到各特征参数的H (Fj)后,就可以定义相应的归一化权值:

3 加权平均型综合评判函数
目标分类结果取决于特征向量与辨识对象(即SMR 目标分类体系)的隶属度和权向量,通过归一化模糊评判矩阵U=(uij)m×n和权矩阵W=(wij)n×m构成加权平均型综合评判函数:

设识别阈值小于Pth的目标为“未知”分类,如果imax是有最大关联概率Pk(Cimax)=maxi{Di}的分类,那么k时刻对特征向量X[k]的目标分类结果为

更新Pk(Cimax)后,该值就成为用于下一次特征向量获取时新的先验概率。
4 仿真分析
4.1 仿真参数及条件
仿真参数如表1所示。
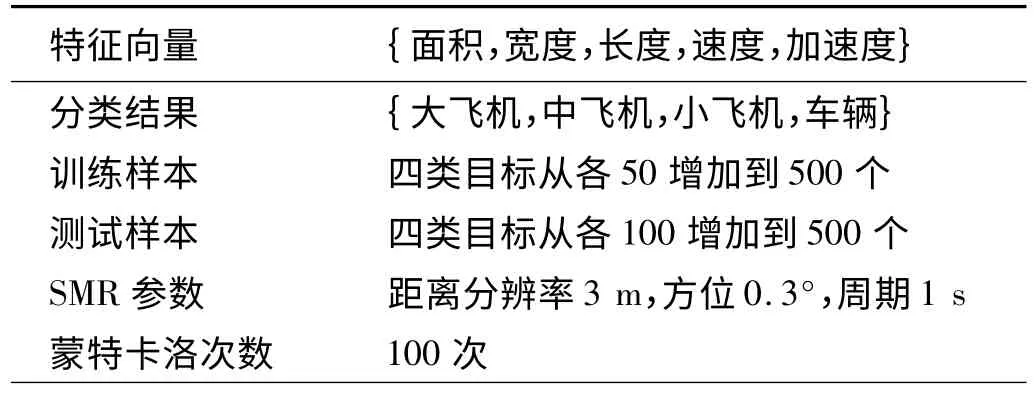
表1 仿真参数
4.2 已知先验概率仿真结果
本节假设已经获得训练样本数据,从而可以对各类目标特征值的均值、均方差以及先验分布进行分布估计。此时,测试样本中各类目标从100 增加到500个,而训练样本中的各类目标从50 增加到500个,通过仿真实验来观察训练样本和测试样本的增加对目标分类正确率的影响。从图1中可以看出,随着训练样本数目的增加,目标分类概率在上升,符合训练样本越多越能得出目标的统计规律的预期,但训练样本数目的增加带来的分类概率提高很有限。这主要是因为每类目标数目达到100时已经能够反映出真实的特征分布。另一方面,测试样本越多,算法分类概率呈微弱下降趋势。这是因为测试样本增多时,训练样本数据的分布特性无法完全体现测试样本的分布,导致分类正确率降低。

图1 已知先验概率时的分类概率
4.3 未知先验概率仿真结果
本节假设没有可用训练样本数据,无法得到目标特征值的均值、均方差的分布统计值,只能使用经验数值。此时,测试样本即为训练样本,各类目标从50 增加到500个,通过仿真实验来观察测试样本数据的增加对目标分类正确率的影响。从图2中可以看出,随着测试样本数目的增加,目标分类概率在上升,这符合学习时间越长目标分类越准确的预期。另一方面,测试样本数目的增加带来的分类概率提高很有限。这是由于通过将前一时刻后验概率作为后一时刻先验概率的迭代机制能够实时反映目标当前分类特征,提高了算法的稳定性。测试样本不均匀分布时会导致算法分类正确率下降。这是因为不均匀的测试样本无法真实体现样本的分布,无法得到正确的均值和均方差,通过100 次蒙特卡洛算法抵消了测试样本不均匀引起的分类错误。

图2 未知先验概率时的分类概率
5 结束语
本文提出了基于隶属度和贝叶斯分类的机场目标分类算法,各特征值为连续变量且符合正态分布。因此,利用柯西分布函数得出各特征值的隶属度,然后采用贝叶斯分类方法得到测量值的概率向量,最后采用加权平均型综合评判函数得到目标分类。实验表明,该分类算法能够准确地对机场各类目标进行分类识别,对先验知识的要求较低,随着分类的进行可以通过使用当前分类概率来提高分类识别的准确率,且算法实现简单,可满足机场场面监视雷达的实时性要求。
[1]刘伟,朱衍波,张军,林熙.高级机场场面监控系统[C]//第四届中国智能交通年会论文集,北京,2008.
[2]金文.场面监视雷达的应用与发展[J].中国民用航空,2011(129):48-49.
[3]Ghadaki H,Dizaji R.Target Track Classification for Airport Surveillance Radar[C]// Proceedings of IEEE Conference on Radar,Shanghai,2006:136-139.
[4]林幼权.球载雷达目标分类与识别技术研究[J].现代雷达,2011(7):1-4.
[5]王睿,李言俊,张科.基于不变矩和SVM分类的三维目标识别方法[J].计算机仿真,2011(1):242-245.
[6]袁祖霞,高贵明.基于高分辨率一维距离像雷达目标识别研究[J].雷达与对抗,2010,30(1):11-14.
[7]缪崇大,高贵明.D-S 证据理论在雷达目标识别中的应用[J].雷达与对抗,2008(3):32-35.
[8]崔彩霞.智能分类方法[M].北京:气象出版社,2009:130-137.
