基于改进高斯模型的车流量检测算法
2013-06-07朱华生
朱华生,叶 军
(南昌工程学院信息工程学院,江西南昌330099)
基于改进高斯模型的车流量检测算法
朱华生,叶 军
(南昌工程学院信息工程学院,江西南昌330099)
提出了一种基于改进单高斯模型的车辆检测与流量统计算法,该算法采用改进的单高斯模型对移动目标进行检测,然后选用HSV颜色空间抑制阴影,提高了目标提取的准确率,最后,按车道分别设置相应的虚拟区域,以实现车流量的统计工作。为验证算法的有效性,在标准测试视频上进行了对比实验,实验结果表明,该算法能够快速地提取车辆目标,且具有较高的车辆识别率,有一定的实用价值。
计算机视觉;高斯模型;阴影抑制;交通
1 引 言
随着社会经济的快速发展,交通拥堵问题日益严峻,实时的交通数据对有效利用城市空间具有十分重要的意义。要实现这一数据的提取,首先要进行车辆检测。Michalopoulos[1]提出的视觉检测方法克服了大多数传统车流检测方法的弊端,具有设备安装简单、易于维护、成本低、联网方便等优点[2]。
目前,基于视觉的交通车流量监测方法主要分为3类:光流法、帧差法、背景消减法等。光流法[3-4]抗噪性能差,计算复杂,若无特别的硬件装置作为支撑,其处理速度相当慢,难以达到实时处理的要求。帧差法[5-6]则需要动态的设定时间间隔进行差分,对于慢速运动的车辆需要选择较大的时间差,以防止产生空洞,影响检测结果。背景消减法[7]是视觉检测算法中最常用的一种方法,其关键在于背景的提取及更新,由于一般的背景建模方法对突发运动和光照突变敏感[8],又不能区分移动目标和移动阴影,从而导致车辆的误检率较高。
本文在背景消减法的基础上提出了一个新的车辆检测与统计算法。即在传统单高斯模型的基础上,采用新的背景初始化方法,能够更加准确的提取移动目标;然后,采用HSV颜色空间来抑制目标阴影,提高算法的准确性;并通过虚拟区域的设定,实现车流量的统计工作;最后,选取Highway I和Highway II两个标准测试序列进行相关实验。实验结果表明,该算法简单、高效,能够快速、准确的提取并统计移动车辆,具有较好的适应性。
2 算法设计
本文提出的交通车流量统计算法主要由3部分构成,即移动目标的提取、阴影抑制和车流量统计等。
2.1 移动目标的提取
检测交通车流量的摄像机一般固定在公路的正上方,视频的背景为公路的路面,背景并不是十分复杂,所以可以采用单高斯模型来实现移动目标的提取。
单高斯模型是基于概率分布的背景提取方法[9-11]。假设图像中的每个像素点是相互独立的,且都服从公式(1)的正态分布。

其中,xij表示点(i,j)处的灰度值;μij表示该像素点的均值;σij2表示该像素点的方差;P(xij)表示该像素点灰度值出现的概率。
利用单高斯模型检测移动目标分3步,即:背景建模、移动目标检测和模型更新。
背景建模。单高斯模型默认将视频的第一帧作为背景。而通常视频的首帧图像中存在车辆(如图1(a)所示,其为HighwayI视频的第1帧),所以需要很长时间的更新才能获得比较准确的背景。为了加快背景的提取速度,目前较为普遍的做法是将视频前N帧的均值作为背景[10]。然而,这种算法得到的背景值与实际值有一定的误差,如图1(b)所示,其为HighwayI视频前50帧的均值得到的背景图象。均值μij可以使用背景对其初始化,方差σij2可以使用公式(2)对其初始化。

其中,表示第t帧上点(i,j)处的值;N表示选取帧的数量。
移动目标检测。它是利用公式(1)对当前帧的每个像素点进行计算,如果像素点的概率大于阈值T,则为判定该像素点为背景点,否则为前景点。T是一个经验值。
模型更新。随着时间的变化,背景也会发生一些变化,如光线的变化。所以要对模型进行更新。更新的原则是:当像素点为前景时,背景保持不变;当像素点为背景时,按公式(3)对背景进行更新。

其中,α是更新参数,表示背景变化的速度,它是一个经验值,本文将α设置为0.03。
为了提高背景初始化的质量,本文提出一种背景初始化新方法。主要思路是:将每个像素点的前N帧构成1个一维数组,再计算它的直方图,最后将出现概率最大的值作为该像素点的背景值。图1(c)是HighwayI视频(200,100)像素点前50帧的直方图,图1(d)是通过本方法获得的初始化背景图。

图1 背景初始化过程及效果对比图
从图1可以看出,该改进算法提取的初始化背景相较于均值提取法更为清晰准确,贴近实际。
2.2 阴影抑制
在进行移动目标检测时,移动的阴影也会被检测出来,基于单高斯模型的移动目标检测算法无法区分移动目标和移动阴影。这些阴影会影响后续的目标识别。阴影的检测和消除方法可分为基于模型[12]和基于属性[13-14]的2种方法。本文采用基于属性的阴影检测法。HSV颜色空间是均匀的颜色空间,它反应了人眼对色彩视觉的三要素,即:色彩(H)、饱和度(S)和亮度(V)。与RGB颜色空间相比,HSV中3个分之间的相关性要小很多,比较适合做阴影检测。在HSV色彩空间进行阴影检测的原理是:在一定的光照条件下,同一物体在阴影区域内和区域外,他们的色彩变化较小,但在阴影区域内的亮度值会下降,同时阴影区域内的饱和度也会降低。

阴影的检测方法是:用公式(4)来检测阴影。其中,IH(i,j),IS(i,j),IV(i,j)和BH(i,j),BS(i,j),BV(i,j)分别表示当前图像和背景图像在(i,j)点的H,S和V分量;α,β,τH和τS是一个经验值。
阴影移除的方法是:将移动目标图像减去阴影图像,使用公式(5):

其中,Iobject(i,j)表示移动目标图像上(i,j)点的值,Ishadow(i,j)表示阴影图像上(i,j)点的值。
经过以上处理后,得到一个二值化图像。再将该图像进行形态学运算,去除干扰和孔洞。主要包括移除小点、膨胀和填充等操作。
以HighwayI视频为例,当α,β,τS和τH分别设置为0.35、0.8、0和50时,阴影检测和移除结果如图2所示。其中,图2(a)、2(c)和2(e)分别表示视频第51帧的移动目标提取图、阴影提取图和去阴影和干扰后的移动目标图;图2(b)、2(d)和2(f)分别表示视频第128帧的移动目标提取图、阴影提取图和去阴影和干扰后的移动目标图。

图2 阴影检测和移除结果示意图
从图2可以发现,该算法能够比较准确识别车辆和移除阴影。虽然阴影没有被完全移除,但留下的少量阴影,对后面的车流量统计影响不大。
2.3 车流量统计
车辆一般是按车道行驶,因此可以将一条公路按照实际情况分成若干车道,然后分别检测每个车道上的车辆。
本文提出的车辆检测方法是:在需要检测的车道上设置一块虚拟区域,如图3所示,(a)是HighwayI视频画面,在该视频的2个车道上设置的2个虚拟区域;(b)是HighwayII视频画面,在该视频的3个车道上设置了3个虚拟区域。
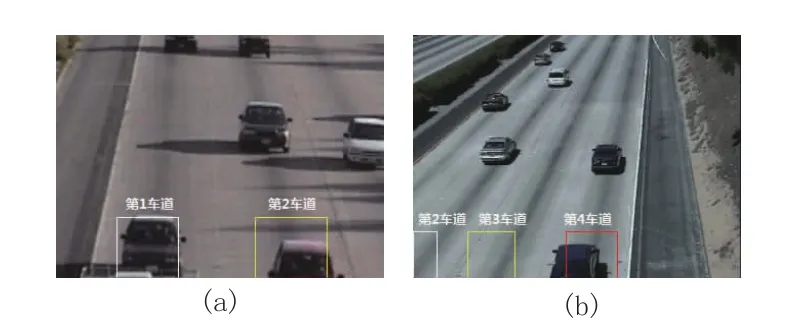
图3 车道的划分
然后,逐帧检测虚拟区域是否有车辆。具体检测方法是:当虚拟区域内移动目标的像素点大于虚拟区域面积的1/2时,就认为虚拟区域有车,否则无车。因此,相邻2帧之间的检测结果有四种可能,如表1所示。从表中可以看出,只要统计无车到有车这一种情况,就可以统计到车辆的数量。

表1 相邻帧的检测信息组合表
3 实验结果与分析
为了验证本文算法的有效性,在标准测试序列HighwayI和HighwayII上做了测试。由于摄像头拍摄角度的原因,在HighwayI上只统计了2个车道,在HighwayII上也只统计了3个车道。车流量统计结果如表2所示,从表2可以发现,实验存在一定的误检现象。产生误检的原因可以从虚拟区域车辆状态变化过程和观察实际视频进行对比来寻找。图4是HighwayI视频各帧虚拟区域内车辆状态图,图中标识了3处车辆误检区。

表2 车流量统计结果

图4 HighwayI视频各帧虚拟区域内车辆状态图
经过对比发现误检的原因,不是因为残留阴影的影响,而是因为2部车辆之间的距离太近产生误检,如图5所示。

图5 车流量统计误检
图5 (a)、(b)分别为视频HighwayI第337帧的原图及去阴影和干扰后的结果图,可以发现图中2部车辆之间的距离太过接近、难以分割,以至于最终将2部车检测为1部车。这一问题可以通过改变摄像头的位置和角度来降低误检率。
4 结束语
提出一种基于改进的单高斯模型的车辆检测与流量统计算法。在传统单高斯模型的基础上,采用新的背景初始化方法提取移动目标;然后,采用HSV特征空间抑制目标阴影;并通过虚拟区域进行车流量统计。最后,选取Highway I和Highway II两个标准测试序列进行实验,实验结果表明,该算法简单高效,能够快速、准确的提取并统计移动车辆,为智能交通系统等提供可靠的数据支撑。
[1] Ju Yongfeng,Zhu Hui,Pan Yong.Vehicle flow detection algorithm based on computer vision[J].Journal of Chang’an University(Natural Science Edition),2004,24(1):92-95.(in Chinese)
巨永锋,朱辉,潘勇.基于计算机视觉的车流量检测算法[J].长安大学学报,2004,24(1):92-95.
[2] Michalopoulos PG.Fiedld deployment of AUTOSCOPETMin the FAST-TRAC ATMS/ATIS program[J].Traffic Engineering and Control,1992,(9):475-483.
[3] Du Yuren,Zhou Aijun.Atrackingmethod ofmobile vehicle based on video sequence images[J].JournalOf Electron ICMeasurementand Instrument,2009,23(03):45-48.(in Chinese)
杜宇人,周爱军.一种基于视频图像的运动车辆跟踪方法[J].电子测量与仪器学报,2009,23(03):45-48.
[4] Ribaric S,Adrinek G,Segvic S.Real-time active visual tracking system[C]//IEEE Melecon.Vol.1.May,2004:231-234.
[5] Jiang Hanxiang,Wang Shaona,Huang Ying,et al.Nitration process and structural analysis on MnN[J].Journal of Chongqing University,2004,2(05):31-33,73.(in Chinese)
张玲,陈丽敏,何伟,等.基于视频的改进帧差法在车流量检测中的应用[J].重庆大学学报(自然科学版),2004,2(05):31-33,73.
[6] Yang Xuechao,Liu Wenping.Moving objects detection technology in video sequen[J].Computer Applications and Software,2008,25(1):215-218.(in Chinese)
杨学超,刘文萍.视频图像序列中的运动目标检测技术[J].计算机应用与软件,2008,25(1):215-218.
[7] Xu Kai,Chen Shixian,Yan Guang.Moving object detection based on improved Gaussian model[J].Laser&Infrared,2012,42(7):821-824.(in Chinese)
徐凯,陈仕先,颜广.基于高斯模型的运动目标检测方法研究[J].激光与红外,2012,42(7):821-824.
[8] LIU Jia-hui,LIZhi.Application of Elastic Stress Absorbing Layer to Deal with Old Pavement[J].Science Technology and Engineering,2010,23(10):5814-5817.
胡觉晖,李一民,潘晓露.改进的光流法用于车辆识别与跟踪[J].科学技术与工程,2010,23(10):5814-5817.
[9] WREN C,AZARBAYEJANIA,DARREL T,et al.Pfinder:real-time tracking of the human body[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(7):780-785.
[10]Yang Jun,Shi Zhongke.Improved single gaussian method for traffic background extraction[J].Acta Photonica Sinica,2009,38(5):1293-1296.(in Chinese)
杨珺,史忠科.基于改进单高斯模型法的交通背景提取[J].光子学报,2009,38(5):1293-1296.
[11]Jiang Peng,Qin Xiaolin.Robust foreground detection with adaptive threshold estimation[J].Journal of Image and Graphics,2011,16(1):37-43.(in Chinese)
蒋鹏,秦小麟.复杂背景下的自适应前景分割算法[J].中国图像图形学报,2011,16(1):37-43.
[12]Jiang C,Ward M O.Shadow Identification.Proceedings of 1992 IEEEComputer Society Conference on Computer Vision and Pattern Recognition,1992:606-612.
[13]Lea G F,Bafcsy R.Combining Color and Geometry for the Active,Visual Recognition of Shadows[C],Proceedings of the 5thInternational Congerence on Computer Vision,1995:203-209.
[14]Sonnoda Y,Ogata T.Separation of Moving bjects and their Shadows,and Application to Tracking of Loci in the Monitoring Images[C].Proceedings of 1998 IEEE International Conference on Signal Processing,1998:1261-1264.
Adaptive vehicle detection and traffic statistics algorithm based on improved Gaussian model
ZHU Hua-sheng,YE Jun
(School of Information Engineering,Nanchang Institute of Technology,Nanchang 330099,China)
A vehicle detection and traffic statistics algorithm based on improved Gaussian model is proposed.The moving target is detected by using improved single Gaussian model at first.Then the Shadows are eliminated through HSV feature space,and the accuracy rate of target extraction is raised.Finally the traffic is counted in the suppositional areas of lanes.The papermakes experiments with standard test video.The results show that the algorithm can detect vehicle quickly and have a higher recognition rates.The algorithm can work well in the actual conditions.
Computer vision;Gaussianmodel;Shadows elimination;Traffic
TP391
A
10.3969/j.issn.1001-5078.2013.10.22
1001-5078(2013)10-1180-04
国家自然科学基金项目(No.61162022),江西省自然科学基金项目(No.2009GZW0020)资助。
朱华生(1965-),男,教授,主要研究方向为图像处理。E-mail:zhuhuasheng@sohu.com
2013-02-27
