新型Smith预估控制在ATP伺服系统中的应用
2013-08-17汪蓉蓉方安安刘景湘
汪蓉蓉,方安安,冯 庆,刘景湘
(南昌大学信息工程学院,江西南昌330031)
1 引言
空间光通信通信容量大、实施控制灵活,安全保密性好以及传输带宽高等特点,已经在国内外得到很好地应用和研究[1]。但是信号光束窄、通信传输距离长,加上外界环境等因素的影响,就会使得伺服系统的控制技术面临很大的困难,其关键技术之一是捕获、跟踪与瞄准(Acquisition、Tracking and Pointing,ATP)复合控制[2]技术。在 ATP 伺服系统中,解决控制对象模型的不确定和滞后、网络传输时延、抗干扰性低的控制方法是其关键难点:粗跟踪系统精度要求不高,所以仅采用滞后校正器解决电机存在的滞后;针对高精度以及高带宽的精跟踪系统[3]采用由比例、积分、微分(Proportion、Integral、Derivative,PID)控制器、PI控制器、PD控制器组成的新型Smith预估控制有着较好的自适应能力、鲁棒性和抗干扰性。
2 系统描述
ATP伺服系统是光电机一体化的复合系统,ATP复合跟踪控制系统的原理如图1所示。信标光进入伺服系统,经过光学主线反射进入粗跟踪系统,通过粗跟踪CCD将光信号转为电信号,然后再进入粗跟踪控制器,而粗跟踪控制器同时要接收光电编码器探测到的视轴的位置而转换成的信号,粗跟踪探测器要将这些信号转换成指令输入到D/A转换器中,D/A转换器将得到的指令转换成模拟信号输入到电机中,用来驱动光学天线转动,这是粗跟踪过程,主要用来实现捕获和粗跟踪。粗跟踪完成之后,将信标光引入精跟踪视场,通过精跟踪CCD将光信号转为电信号,进入精跟踪控制器,精跟踪控制器把信号转换成指令传输到D/A转换器来驱动压电陶瓷(PZT)以至于对快速倾斜镜(FSM)进行精校正完成精跟踪,使得跟踪误差达到最小。
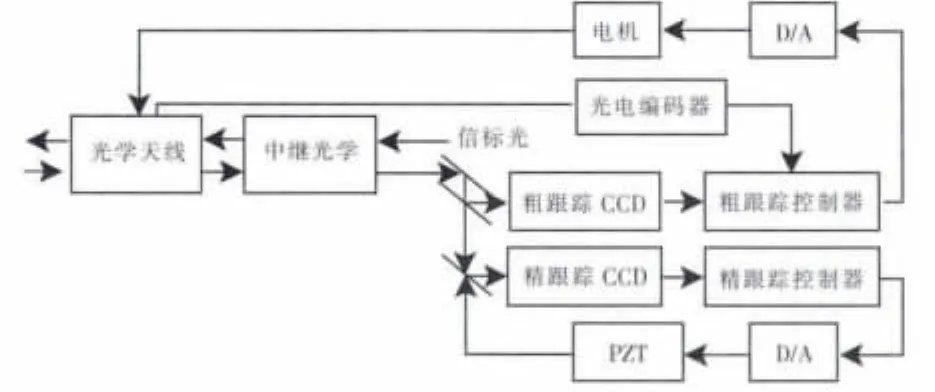
图1 ATP复合控制系统的结构图Fig.1 Block diagram of ATP multiple control system
在ATP伺服系统中,粗、精跟踪系统的视场和控制精度要有较好的匹配[4],即视场的大小既要满足捕获目标容易,又要容易将目标引入的粗跟踪视场,而且粗跟踪系统的跟踪精度要小于精跟踪视场,才能将入射光引入到精跟踪视场[5]。精跟踪必须大于粗跟踪系统的最小误差才能进行粗跟踪。同时由于粗跟踪的带宽一般小于10 Hz,而精跟踪的带宽达到几百至上千赫兹,加上粗跟踪本身的特性,精跟踪系统的控制精度又决定了整个复合控制系统的跟踪精度,所以复合系统的粗跟踪部分采用传统的PID控制以及用校正器对电机存在的滞后进行校正,而精跟踪采用新型Smith预估控制来达到更高的控制精度。
3 粗跟踪系统的校正控制
粗跟踪控制对象为电机,电机的传递函数一般建立在输出转速相对于输入电压上的单输入单输出的线性系统,在电机电气方程和机械方程的基础上进行拉普拉斯变换得到传递函数模型,得到电机的传递函数[6]为:

电机一般都会存在滞后,我们采用SISO设计器的相位超前校正来进行补偿,它可以使系统的相位裕量增加,从而提高系统的相对稳定性[7],有效地克服纯滞后的影响[8],而且还可以使增益穿越频率增加,使得阶跃响应过度过程加快。这里基于电机的传递函数,使用根轨迹和开环系统的波特图来观察补偿后的阶跃响应来调整校正器的零极点以及增益,即用数学模型来设计补偿去逼近输入输出。校正后的根轨迹、波特图如图2所示,校正器的传递函数为:

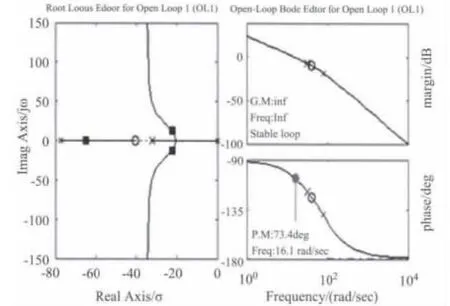
图2 校正后的根轨迹、波特图Fig.2 Diagram of root locus、bode plots after correct
图3为粗跟踪系统的MATLAB仿真结果,曲线1为PID控制的阶跃响应曲线,曲线2为经过校正器校正的PID控制阶跃响应曲线,与曲线1相比,超调量大大减少了,系统响应时间也明显加快,达到很好的跟踪精度。

图3 粗跟踪系统控制方法比较Fig.3 Compare of coarse tracking systems control method
4 精跟踪系统的改进Smith预估控制
在ATP伺服控制系统中,对于精跟踪伺服系统的控制对象压电陶瓷驱动的快速倾斜镜所存在的滞后[9],会影响跟踪精度。而Smith预估器是在存在时滞的系统中通过与控制对象并联一个补偿环节,它是解决时滞问题非常有效的方法之一。Smith预估器控制原理如图4所示,其中 R(s)是Smith预估器的输入,Y(s)是Smith预估器的输出,C(s)是控制器的传递数,G(s)e-τs是控制对象的传递函数,而 Gm(s)e-τms是控制对象的预估模型。

图4 Smith预估控制原理图Fig.4 Principle diagram of the Smith predictor control
当 G(s)=Gm(s),e-τs=e-τms,则图4 的闭环传递函数为:

从上式可以看出,经过Smith预估器补偿相当于将延迟引入闭环之后了,使得系统的稳定性、动态性和调节速度得到很好的提高。
Smith预估器可以使得跟踪控制器提前工作,加速调节的过程,然而它必须依赖于准确的预估模型,而且鲁棒性和抗干扰性低的特点,所以改进的Smith预估控制非常有必要,同时必须结合别的行之有效的控制算法和控制技术来实现。传统的控制器是用同一个控制器同时控制系统的定值响应响应和误差扰动,但是控制器的设计要满足对这两个性能的折中的指标是很难实现的,特别是随着时滞的增大,这一特点尤为突出。PID、PI以及PD控制[10]都有和很好的控制优点:PID控制对系统进行定值跟踪;PI控制算法进行设定值跟踪响应的期望极点配置,使得系统的稳定性增加,防止震荡;而PD控制用与对控制对象的预估模型进行反馈修正,盖上环路张宗成的干扰,来提高系统的带宽,使得前向通路的PID控制得到更好的控制效果。改进的Smith预估器的结构图如图5所示。

图5 改进Smith预估控制结构图Fig.5 Block diagram of new Smith forecast control
其中,C(s)是PID控制器的传递函数,D(s)是PI控制器的传递函数,B(s)是PD控制器的传递函数,R(s)、Y(s)分别为改进型Smith预估控制的输入和输出,D1(s)和 D2(s)为干扰信号,G(s)e-τs是控制对象的传递函数,Gm(s)e-τms是被控对象的预估模型,Gm(s)是预估模型中不含滞后的部分,其中e-τs,e-τms分别为控制对象标称模型、预估模型的纯滞后环节,τ,τm为纯滞后时间。
由图5可以导出系统输出对参考输入的传递函数为:

系统输出对扰动D1(s)的传递函数为:

系统输出对扰动D2(s)的传递函数为:

当 τ=τm,G(s)=Gm(s)时,即 P(s)=G(s)e-τs=Gm(s)e-τms被控对象预估模型等于真实模型,则式(4)、(5)、(6)可等效为:

通过对他们的参数进行很好地配置,就可对偏差进一步收敛使得Smith预估控制就达到很好的控制精度。
基于精跟踪回路系统的模型匹配和模型失配在有脉冲干扰的条件下的阶跃响应曲线分别如图6和图7所示。

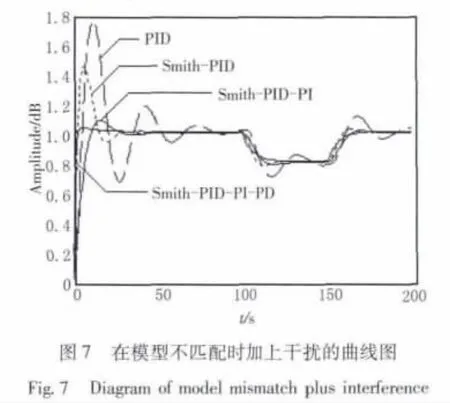
图6中可以看出简单的PID稳定性和动态性差,出现严重的超调和振荡,最大超调量为46%,调节时间为16 s,同时抗干扰能力差;基于Smith预估的PID的稳定性和抗干扰能力有些提高;由PID、PI组成的Smith预估控制的控制能力有很好的改善,最大超调量为24%,调节时间为10s;而由PID、PI、PD组成的Smith预估控制达到了最大超调量值为1.5%最小,调节时间值为6 s最短,抗干扰能力最强的优点。
模型失配在有脉冲干扰的条件下的阶跃响应曲线图7所示,从图7中可以看出PID控制超调时间比较大,最大超调量为76%,调节时间为18s,鲁棒性差;而基于Smith预估的PID控制性能有一些改善,但是超调量还是比较大,最大超调量为44%,调节时间为12 s;由PID、PI组成的Smith预估控制效果相对基于Smith预估的PID控制性能加强很多,但是相对由PID、PI、PD组成的Smith预估控制的最大超调量为2.2%、调节时间值为8s、抗干扰性还是比较差。
5 复合控制系统仿真
基于图1所示的ATP复合控制系统的结构框图,利用MATLAB/SIMULINK对其进行仿真的脉冲干扰的阶跃响应曲线如图8所示,曲线a是没有加控制的复合控制的阶跃响应曲线,曲线b是在粗跟踪控制系统上加校正器的阶跃响应曲线,曲线c是将校正控制和改进的Smith预估控制同时分别应用到粗、精跟踪回路的阶跃响应曲线,图中可看出基于两种控制方法的复合系统实现了很好的跟踪给定、有很好的稳定性能、抗干扰性和鲁棒性。
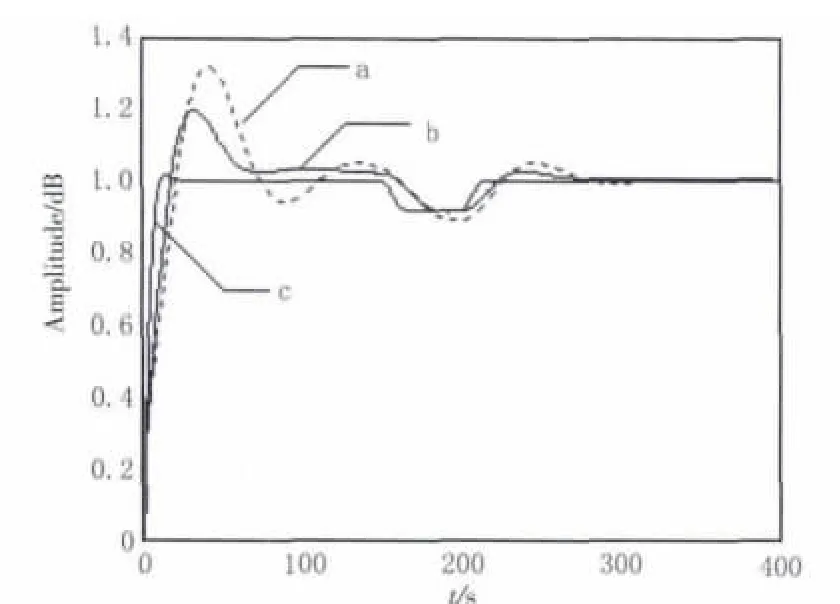
图8 复合控制仿真结果图Fig.8 Simulation results diagram of multiple control
6 结论
针对ATP控制系统中控制对象模型难以确定、网络时延,提出了一种改进的Smith预估控制方法,通过分析粗、精跟踪控制精度的要求的不同,在系统中分别采用校正器和新型的Smith预估控制对ATP伺服系统的粗、精跟踪进行有效地控制,也通过了理论推导和仿真分析说明得到了很好控制效果,而且基于复合系统的仿真更是证实了这一点。
[1] Zhao Zhengchun.Research on ATP system technology in free space laser communication[D].Guilin:Guilin University of Technology,2007.赵政春.自由空间光通信ATP系统技术的研究[D].桂林:桂林工学院,2007.
[2] Zuo Tao,Ai Yong,Huang Haibo,et al.Multiple control method of ATP system for space optical communication[J].Infrared and Laser Engineering,2011,40(1):107 -111.左韬,艾勇,黄海波.空间光通信ATP系统的复合控制方法[J].红外与激光工程,2011,40(1):107 -111.
[3] Li Ming,Ai Yong,Cao Yang.Research of fine tracking servo system for FSO terminal[J].Laser Technology,2009,33(3):262 -265.黎明,艾勇,曹阳.空间光通信终端精跟踪伺服系统研究[J].激光技术,2009,33(3),262 -265.
[4] Luo Tong.Technology of acquisition,tracking in satellite laser communication[D].Chengdu:University of Electronic Science and Technology of China,2004.罗彤.星间光通信ATP中捕获、跟踪技术研究[D].成都:电子科技大学,2004.
[5] Lian Ming,Fu Hongya.Control system of link simulator for space optical communication[J].Infrared and Laser Engineering,2009,38(1):101 -105.廉明,富宏亚.空间光通信链路模拟平台控制系统[J].红外与激光工程,2009,38(1):101 -105.
[6] Kang Kai.Realization of digital PID DC motor speed control system based on the MATLAB[J].Computer Knowledge and Technology,2010,6(22):6372 -6374.康凯.基于MATLAB的数字PID直流电机调速系统的实现[J].电脑知识与技术,2010,6(22):6372 -6374.
[7] Hu Zhen,Jiang Huilin,Tong Shoufeng,et al.Research on ATP system technology of laser communication terminal in space[J].Acta Armamentarii,2011,32(6):752 -757.胡贞,姜会林,佟首峰,等.空间激光通信终端ATP技术与系统研究[J].兵工学报,2011,32(6):752 -757.
[8] IBRAHIM K Y.IMC based automatic tuning method for PID controllers in a Smith predictor configuration[J].Computers and Chemical Engineering, 2008,28:281-290.
[9] Fan Wei,Yu Xiaofen,Xi Lin.Research on driving system and controlling means of PZT[J].Optics and Precision Engineering,2007,6(22):368 -371 .范伟,余晓芬,奚琳.压电陶瓷驱动系统及控制方法研究[J].光学精密工程,2007,15(3):368 -371.
[10] Wang Huapei,Wei Tong,Li Haitao.Research on current loop for BLDCM based on improved Smith predictor[J].Micromotors,2012,45(3):47 -65.
