基于扰动电压观测器的死区补偿算法
2013-06-06陈康平曾岳南
陈康平,曾岳南,陈 勤
(广东工业大学自动化学院,广东广州 510006)
0 引言
在目前的PWM调制方法中,空间矢量调制法可以获得较高的直流电压利用率和较低的输出谐波[1],因而受到广泛的应用。但在桥式逆变电路中,为了防止同一桥臂的上下两个开关管发生直通,需要在两个开关管的开通与关断之间加入死区时间,然而加入死区时间将带来不良影响:Ueda R[2]等人提出死区的存在可能会导致系统的不稳定;Dodson R.[3]等人研究了逆变器死区时间对于输出电压的影响,发现死区的存在会使输出电压的基波幅值降低5%~15%左右,并指出死区的存在使得逆变器的输出电流含有大量的谐波;Murai Y.[4]、Choi J.[5]等人研究指出死区的存在将导致零电流箝位现象。这些不良影响就是所谓的死区效应,其会导致逆变器输出电压基波分量减小、输出电流波形发生畸变并输出转矩脉动等。
针对死区效应,国内、外学者已提出多种补偿方法。文献[6]采用设计硬件电路直接检测功率管的导通时间,利用软件进行补偿,避免了电流过零检测,但需要增加额外的硬件。文献[7]根据零电流箝位产生原因,在每个PWM 周期内对两个非零空间电压矢量作用时间进行分别补偿,取得良好效果。但该补偿所需死区补偿时间是通过离线测量得到,而开关的导通关断时间和功率器件的压降都是随工作状态的不同而变化,其受直流母线电压、三相电流、工频以及电机转速变化的影响,因此用离线的方式很难获得理想的补偿效果。
综上所述,考虑到直流母线电压和负载的不同,功率管开通时间和关断时间的变化,以及管压降等不确定因素,本文给出了一种基于扰动电压观测器的在线补偿算法。该算法不需要准确知道开关器件的开通和关断时间,而且不需要任何额外的硬件电路和离线测量实验,具有实现简单、输出波形谐波含量小等特点,并且能有效抑制零电流箝位现象。仿真结果表明该算法是有效的、可行的。
1 死区效应分析
图1为永磁同步电机三相PWM逆变器驱动系统原理图。因为死区时间的存在,使在死区时间内输出电压的大小不受开关管控制,而由输出电流的方向来决定,另外IGBT的开通和关断都需要一定的时间,且考虑IGBT和反并联二极管的通态管压降,这些因素共同作用使输出电压存在误差。

图1 永磁同步电机三相PWM逆变器驱动系统原理图
为了方便分析,以a相为例分析PWM逆变器的死区效应,定义电流由逆变器流向负载时的方向为正。图2 表示a 相死区效应波形图。图2(a)表示上下两个开关管的理想驱动信号;图2(b)表示考虑死区时间的上下两个开关管的实际输出信号;图2(c)表示ias>0 时考虑死区时间的实际输出电压;图2(d)表示ias<0 时考虑死区时间的实际输出电压;图2(e)表示ias>0 时考虑死区时间和开关延时的实际输出电压;图2(f)表示ias<0 时考虑死区时间和开关延时的实际输出电压。由以上波形可得到由死区时间和开关延时所造成的输出电压误差。



图2 相死区效应波形图


由式(1)、(2)、(3)、(4)可得:

类似的可以得到b、c两相的误差电压:

此三相误差电压可认为是由死区时间和开关延时所产生的“扰动电压”。
2 死区补偿算法


其中:

由式(6)、(7)、(8)可得相电流在d、q 轴坐标系下的表示:
以前如果想买私募基金或者信托产品,只要满足100万元到300万元人民币不等的资金门槛就行,所谓的合格投资者审查基本上是一个形式。而资管新规实施后,无论是银行、券商还是信托、私募基金,发行的资管产品将被严格分为公募和私募两类。公募产品谁都能买,而私募产品仅供合格投资者。这里说的合格投资者不但必须具有2年以上投资经历,并且需要家庭金融资产至少在300万元到500万元以上,或者是投资者本人三年的年均收入在40万元以上。要求显然比以前提高不少。换句话说,目前的很多高净值客户以后只够格购买公募产品了。想买定制化、投资非标或者非上市股权的私募产品,需满足合格投资者的要求。

则可将式(9)表示为:

由于本文基于永磁同步电机空间矢量控制系统,采用id=0 的控制策略,因此可以将式(14)简化为:

由式(15)可得在静止坐标系的扰动电压矢量可以表示为空间向量:

当ias>0 时,在两相静止坐标系中,误差电压矢量可以用图3表示,误差电压矢量取决于电气位置,可将两相静止坐标系平面分为6个扇区,每个扇区对应一个误差电压矢量。于是可得到在两相静止坐标系中补偿电压与电气位置的关系如表1所示。
考虑死区效应对扰动电压的影响,在旋转坐标系下永磁同步电动机的模型可表示为:


图3 根据电气角度判断扰动电压扇区分布

表1 补偿电压与电气位置关系
其中:ud、uq分别为d、q 轴的输入电压,Rs为定子电阻,Ld、Lq分别为d、q 轴的电感,id、iq分别为d、q轴电流,ϕf为定子磁链幅值,ω 为电机转速。式(17)可化为:

由于死区造成的扰动电压受多种实际条件的影响,难以直接得到,因此可以将此扰动电压作为系统的状态变量,通过设计一个状态观测器[8]对扰动电压进行估计。设Ld=Lq=Ls,式(18)化为离散状态方程的形式为:

其中:


其中:Ts为采样周期。
因为采样周期很短,可认为一个采样周期内扰动电压不变,即:
x2(k +1)=x2(k)。
以x2为被测对象,由式(19)、(20)可得到降阶扰动电压观测器的表示方式[9]:


其中F 为观测器的增益矩阵。
考虑到观测器的稳定,可将误差动态方程表示为:

图4 补偿前相电流波形及其谐波分析

图5 补偿后相电流波形及其谐波分析


F=FI2,
λ1=λ2=1 +TsFLs-1。
为了保证系统的稳定,所有的特征值应满足:
0 ≤λ1,2<1。
λ 的取值会影响观测器的性能,其太大则观测器反应速度慢,太小则会导致系统不稳定,综合考虑系统的稳定性和快速性,本论文取λ=0.764 7。
3 仿真结果及分析
根据永磁同步伺服电动机矢量控制系统基本原理在MATLAB中建立仿真模型,所选永磁同步电机参数为:Rs=2.875 Ω ,Ld=Lq=8.5×10-3H ,ϕf=0.175 ,J=1×10-3kg·m2,极对数p=4 ,逆变器开关频率为10 kHz,死区时间设置为5 μs 。图4 表示补偿前的相电流波形图及其谐波分析,图5 为加补偿后的相电流波形图及其谐波分析。图6 为加入死区补偿并调节补偿电压比例环节后的相电流波形图及其谐波分析。
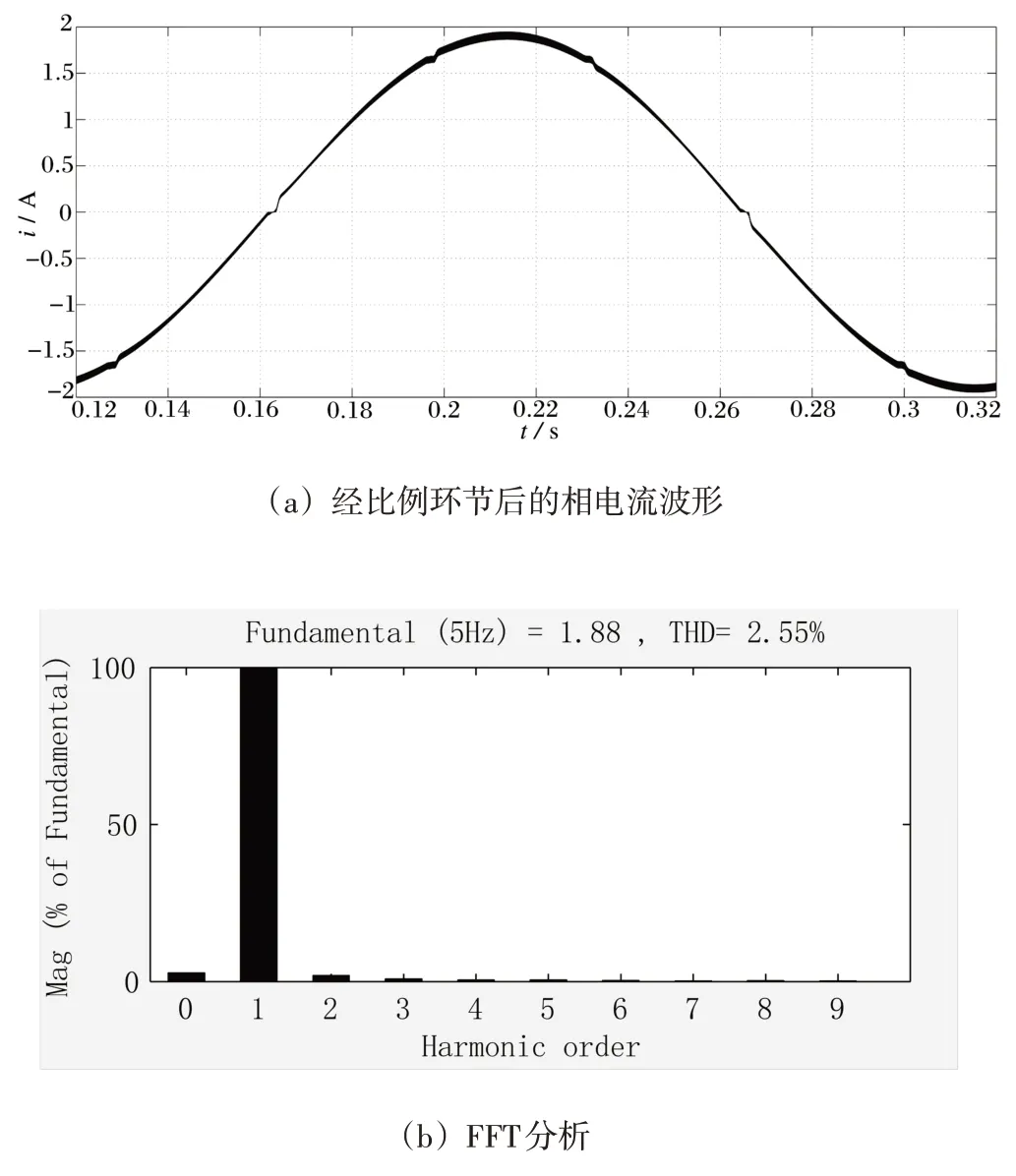
图6 加入补偿并经过比例调节的相电流波形及其谐波分析
由仿真结果可以看出,补偿前死区效应导致输出转矩的脉动,相电流在过零点时发生严重畸变,并且使相电流含有大量谐波;加入补偿后,相电流波形的正弦度得到明显改善,有效抑制了零电流箝位现象,并且相电流谐波含量也大幅减小;由图5和图6的对比可以看出,在补偿电压端加入比例环节可以实现对补偿效果的微调,使相电流波形的正弦度更好,谐波含量更低。
4 结语
本文针对逆变器的死区效应,给出了一种基于扰动电压观测器的死区补偿算法,该算法不需要准确知道直流母线电压、死区时间,并且综合考虑了随着负载的不同,功率管开通时间和关断时间的变化,以及管压降等不确定因素,实现在线补偿。永磁同步电机空间矢量控制系统死区补偿仿真结果表明,该算法能有效的抑制零电流箝位现象并使电流谐波含量大幅减少,在补偿电压端加入比例环节能实现对补偿效果的微调。
[1]Attaianese C,Nardi V,Tomasso G.A novel SVM strategy for VSI dead-time-effect reduction[J].IE-EE Trans-actions on Industry Applications,2005,41(6):1667-1674.
[2]Ueda R,Sonoda T,Inoue Y.Unstable oscillating motor in PWM variable speed drive of induction mode and its stabilization[A].Records of Industry Applications Society Annual Meeting[C],San Franc- isco,USA,1982.
[3]Dodson R,Evans P.Compensating for dead time degradation of PWM inverter waveforms[J].IEEE Proceedings B:Electric Power Applications,1990,137(2),73-81.
[4]Murai Y,Riyanto A,Nakamura H,et al.PWM strategy for high frequency carrier inverters elimi-nating current clamps during switching dead-time [A].Records of Industry Applications Society An-nual Meeting[C],Houston,TX,1992.
[5]Choi J,Sul S.New dead time compensation elim-inating zero current clamping in voltage-fed PWM inverter[A].Records of Industry Applications Soci-ety Annual Meeting[C].USA,1994.
[6]刘军锋,李叶松.一种新颖的死区补偿和电机相电压检测方法[J].电力电子技术,2007,41(1):33-34,89.
[7]周华伟,温旭辉,赵峰,等.一种抑制VSI 零电流箝位效应的死区补偿方法[J].电机与控制学报,2011,15(1):26-32.
[8]Kim Hyun-Soo,Moon Hyung-Tae,Youn Myung Joong.Online dead-time compensation method us-ing disturbance observer[J].IEEE Transactions on Power Electronics,2003,18(6):1336-1345.
[9]K.Ogata,Discrete-TimeControlSystems.Englewo-od Cliffs[M].NJ:Prentice-Hall,1987.
