一种改进的噪声门限检测方法
2013-06-05黄金杰
任 伦 黄金杰 井 伟
(西安电子工程研究所 西安 710100)
1 引言
雷达回波信号中,既可能有目标回波信号,也存在噪声和杂波等干扰信号,所以雷达目标回波信号的检测是在噪声和杂波干扰背景下的二元信号最佳检测问题[1]。其中接收机噪声主要来源分为内部噪声和外部噪声[2],一般变化比较缓慢,且分布在雷达的整个作用范围内。目前雷达目标检测主要采用门限检测方法,在只有噪声干扰下的信号检测称之为噪声门限检测[1],噪声门限检测技术在整个雷达信号处理技术中相对比较简单,但其效果将关系到最终的信号检测性能,所以仍是一个非常重要的问题。通常噪声门限检测采用奈曼-皮尔逊(Neymun-Person)准则[1],即在雷达目标回波信号检测中,要求在一定的虚警概率条件下,检测概率达到最大。
雷达检测中,过高的虚警会大量占用雷达资源,甚至导致雷达无法正常工作,所以降低虚警概率显得尤为重要。对于同一目标,接收机信噪比与距离的四次方成反比,随着距离的由远及近,信噪比逐渐变大,近距离的目标回波强度非常大。为此本文提出了一种改进的噪声门限检测方法,根据信噪比随距离的变化,设计随距离变化的检测门限系数,兼顾了噪声随时间的变化和接收机信噪比随距离的变化。此外,对于此方法的工程应用,本文也提出了简单设想,可实现整个检测范围内平均虚警概率的降低或者提高雷达远程探测能力。
2 方法原理
2.1 噪声门限检测基本原理
噪声环境中信号的自动门限检测,关键是自动形成与噪声干扰环境相匹配的自动门限检测电平,其原理框图[1]如图1所示。

图1 自动门限检测原理框图
图1中,噪声样本选通电路保证了用于噪声平均电平估计的样本数据是选自噪声区的采样,消除了目标回波信号、杂波干扰信号等对噪声平均电平估计的影响。通过噪声平均电平估计器对x(n)求均值,得到噪声的平均电平估计值,只要选择的样本数足够多,估计值的均方误差就足够小,估计值就非常接近噪声平均值。噪声电平的均值乘以系数c,所形成的检测门限电平随噪声强度的变化而变化,从而实现噪声环境中信号的恒虚警率检测。
一般情况下,噪声包络的概率密度函数服从瑞利分布,即
式中,σ为噪声的标准差;H0表示没有目标存在。单次检测的虚警概率为:

由(4)式可知,虚警概率只与门限系数c有关,所以可以通过调节门限系数c来达到理想的虚警概率。
2.2 改进的噪声门限检测原理
[3]可知,对于同一目标,接收机接收到的回波信噪比与距离的四次方成反比,即

m为一定值;r为检测单元的距离。雷达在噪声环境下的检测概率

式中,I0(·)表示修正的零阶贝塞尔函数;A是目标回波幅度。检测概率的计算比较复杂,一般采用近似计算,North提出了一种非常精确的近似[3]:

假设最远端的虚警概率为P;信噪比为M,则为了保证每个检测单元检测概率相同,即:
K为固定值。则虚警概率随距离变化的关系:

由最远检测单元的距离、所要达到的检测概率和虚警概率,可以求出(5)式中的m值,将(5)式带入公式(9)中,即可求得不同距离上对应的虚警概率,由于虚警概率与检测概率的变化趋势是相同的,即虚警概率变大时检测概率也会随之变大,反之亦然。所以只要保证不同检测单元的虚警概率不低于公式(9)给出的临界值,就可以保证每个检测单元上的检测概率不低于设计要求的值。
另由(4)式可知:
将(9)式计算得到的虚警概率带入(10)式便可求出不同距离单元对应的检测门限系数,用此门限系数进行噪声门限检测,便可在保证一定检测概率的情况下尽可能的降低虚警。
2.3 计算虚警时间
虚警时间[3]是指两次虚警之间的平均时间,虚警时间越高,对应的虚警概率越小,对雷达操作员来说,虚警时间比虚警概率更有意义,虚警时间的计算公式:

其中Tfa为虚警时间,tint为一个脉冲重复时间(PRI),N为检测单元数目。
采用非线性的门限系数之后,每个检测单元的虚警概率都不同,所以虚警时间的计算公式变为:

3 工程实现与计算机仿真[4]
图2是各距离单元虚警概率对应的检测门限系数,其中距离选择在5km~15km,分辨单元为50m,虚警概率不小于10-8,检测概率不小于0.9。本文后面的实验均是在此条件下进行。
由图可看出,虚警概率和门限系数随距离变化迅速,在距离小于13km后虚警概率已经非常之小,基本不会出现虚警,此时如果继续增大检测门限,对于降低虚警已无意义,只会对检测性能带来损失。为此实际应用中可将检测单元按距离远近分为若干段,每段设置检测门限即可。具体应用有两种,一是不改变最远距离段的检测门限,依次提高近距离段的检测门限,最终实现整个检测范围的平均虚警概率的降低;二是适当降低最远距离段的检测门限,以此提高雷达的远程探测能力,同时提高近距离段的检测门限,保证整个检测范围的平均虚警概率满足要求。

图2 不同距离下的门限系数
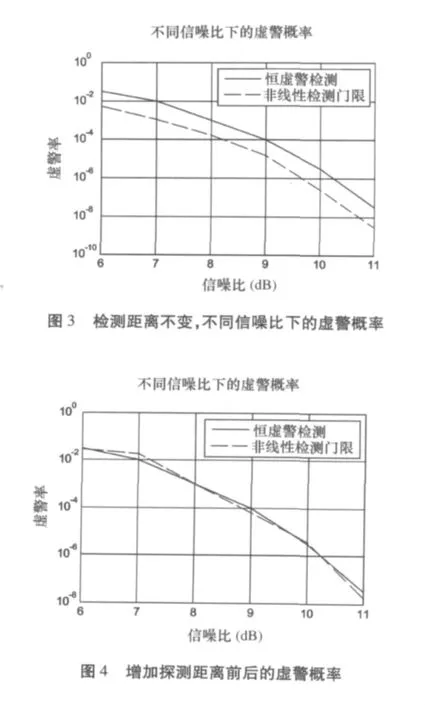
对于应用一,将检测单元按距离分为三段:5~13km,13~14km,14~15km,门限系数分别为:4.9、4.6、4.2,对应各段的平均虚警概率为 10-8、10-7、10-6,实验统计测得平均虚警概率为10-7。
图3比较了不同信噪比(最远端)下,保证最远端检测概率不低于0.9时,选用恒虚警检测和分段检测门限所得的实际虚警概率。由图可知,在不同的信噪比环境下,采用分段检测门限检测方法的虚警概率均比传统的恒虚警检测技术有大幅降低,约为传统方法的1/10,说明所提方法对于噪声环境下的目标检测性能具有很大改善。
对于应用二,不能无限降低检测门限以提高探测距离,因为远端检测门限提高以后,整个场景下的虚警大部分都来自增加的距离段,检测门限降的越低,增加的距离越多,产生的虚警就越多,整个场景下的平均虚警概率就会增大。本文通过试验计算得到虚警概率增大10倍时探测距离增加的经验公式:

式中R增为探测距离的增加量;R为原有的最大探测距离。
下面按上述条件计算整个检测范围的平均虚警概率,最大检测距离为15km,由式(13)可知,最远端虚警概率增大10倍,探测距离增加1km,5~15km检测单元处理方式与应用一相同,图4比较了增加检测距离前后、并且分别选用恒虚警检测和分段检测门限所得的实际虚警概率。由图可以看出,增加检测距离后,采用分段检测门限,虚警概率基本保持不变。
4 结束语
本文所述方法,充分考虑到雷达接收机信噪比随距离的变化情况,对于降低整个检测范围的平均虚警概率或增加雷达远程探测能力,都有一定效果;同时本文设计的分段门限系数,实现简单,便于工程应用。本方法存在以下两点问题,有待进一步研究:首先是按距离进行分段分配系数不一定是最优的,工程应用中还可进一步改进,本文只是提出了一种思路;其次是对于杂波干扰,信杂比随距离变化比较复杂,杂波干扰环境下,如何实现随距离变化的门限设置有待研究。
参考文献:
[1]赵树杰.雷达信号处理技术[M].北京:清华大学出版社,2010,225 -231.
[2]丁鹭飞,耿富录,陈建春.雷达原理(第四版)[M].北京:电子工业出版社,2009,52-54.
[3]Bassem R.Mahafza,Atef Z.Elsherbeni.MATLAB SimulationsforRadarSystemsDesign[M].北京:电子工业出版社,2009,10 -11,53-57.
[4]郭爱芳,侯民胜,郭廷铠.噪声恒虚警处理电路的计算机仿真[J].电子工程师,2007,33(7):4-6.
