城轨车辆防滑防空转控制浅析
2013-06-01孙宗先
隋 燕,孙宗先
(南车青岛四方机车车辆股份有限公司技术中心,山东青岛 266111)
0 引言
随着世界铁路运输的发展,高速和重载成为城轨车辆设计的重要方向。这就对城轨车辆制动系统的发展提出了更高的要求,其中最为关键的问题是如何进一步提高防滑控制系统的性能,以便在制动时,既能防止车轮擦伤,又能充分利用粘着,得到较短的制动距离。
防滑防空转控制是由牵引系统控制单元完成对牵引电机的控制过程,通过在牵引模式下改变牵引力,在制动模式下改变电制动力。其用于在不利的轨道条件下提高加速和减速性能。牵引系统空转/滑行保护具有以下任务:(1)充分利用轮轨粘着力;(2)防止牵引时驱动轴的空转以及制动时驱动轴的滑行;(3)减少车轮和轨道的磨耗。空转/滑行保护连续监控列车速度和驱动轴的旋转速度。如果有差值,牵引力自动减少以满足轮轨粘着力。如果轨道条件变好,摩擦系数变高,那么牵引力将按照一定的斜率(可调节)提高到轮轨粘着力。空转/滑行保护的持续时间由牵引控制单元监控。
防滑防空转的目的:其一是在减少的黏着条件下提供最好的牵引力,其黏着系数为α(α=F/mg,其中F是瞬时牵引力,m是车辆黏着重量,g是重力常数,黏着重量为所有动轴的轴重和);其二是限制牵引力的参考值确保动轴的车轮不要失去控制滑行,不要超过最大允许的转差率。在牵引控制单元中可以在三个防滑防空转控制子系统中选择,其一,优化防滑—防空转控制;其二,防滑—防空转保护;其三,Δν控制。其中,优化的防滑—防空转控制是到目前为止最常用的系统。
1 防滑防空转控制
1.1 概要
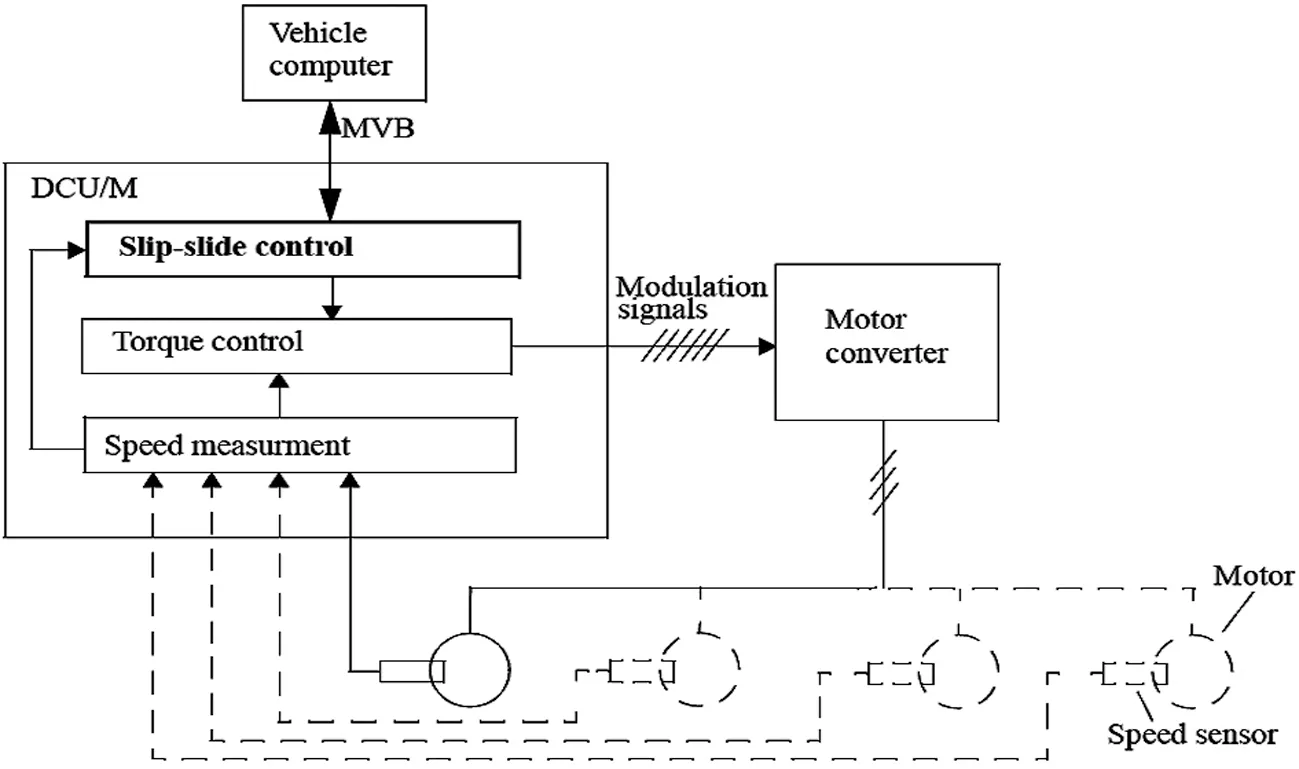
图1 工作环境中防滑控制系统的简化
防滑防空转控制检测的是车辆动轴的速度。它探测到车轮在牵引模式下的空转和动态制动模式下的滑行。当车轮的空转或滑行被探测到后,减小牵引变流控制中的牵引力参考值直到空转或滑行停止。防滑防空转的目的是当轨道和车轮之间的黏着系统达不到所要求的牵引力时,获得尽可能高的牵引力;并且减少牵引力参考值以使得驱动轴上的车轮不会在牵引状态下发生不可控制的空转,在电制动时不会锁死,不超过最大的允许空转速度。图1为工作环境中防滑控制系统的简化。
1.2 基本原理
基本原理参见图2。考虑一个具有PI 控制器的控制系统,这个控制系统的目的是调整相对于参考值的空转速度。
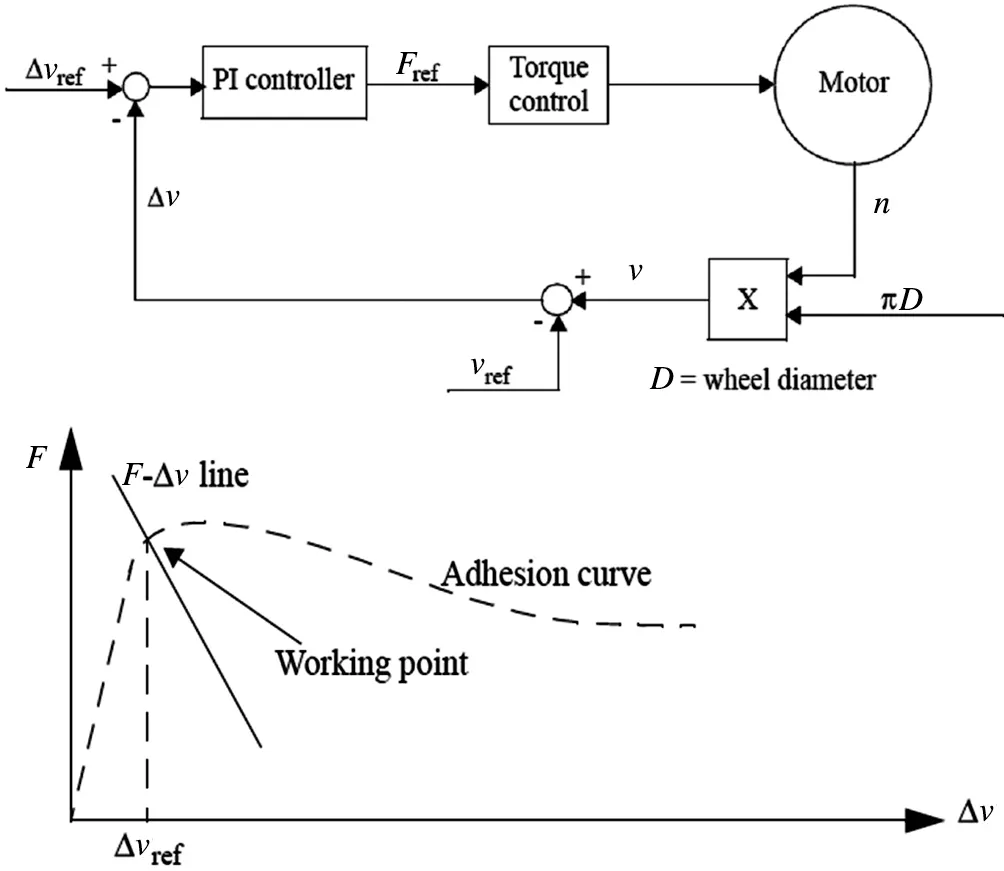
图2 基本原理
在短的运行间隔中Fref是由牵引力和空转速度(一条F-ΔV线)之间的线性关系决定的。PI控制器的放大与F-ΔV 线的斜率相对应。积分部分沿线移动直到F-ΔV 线和黏着曲线的交叉点与空转速度参考ΔVref相符。
优化的防滑防控转控制系统就是从这一简单系统发展起来的,如图3所示。F-ΔV线被限制在一个有限的间隔内并且控制系统的积分部分被一个寻求最大可能牵引力的系统所代替。
防滑防空转控制系统可以是两个状态中的一个。
(1)监控:Fref曲线的第1 部分。
由于黏着很高以至于可以获得所要求的牵引力。防滑防空转控制在Fref.out=Fref.in时不起作用,但它随时处在准备状态,以便在必要时减少Fref.out。
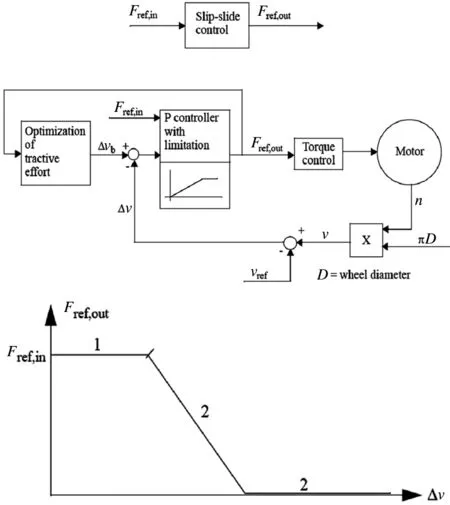
图3 优化的防滑防空转控制系统
(2)激活:Fref曲线的第2部分。
防滑防空转控制必须减少牵引力(Fref.out<Fref.in),是为了防止太大的空转速度,当优化的防滑防空转处于激活状态时,空转指示被设定。
1.3 监控状态
在监控状态下Fref.out=Fref.in,即防滑防空转控制不减少Fref,如果防控转速度限制被超过或空转速度增长很快。此时可以认为车轮发生空转,Fref.out相应下降并且防滑防空转控制系统改变到激活状态,如图4所示。
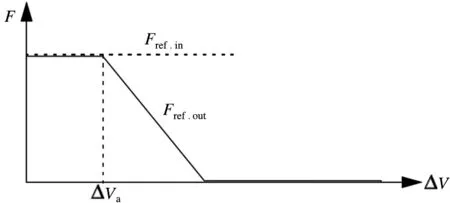
图4 当ΔV>ΔVa时,状态变为激活状态
1.4 激活状态
在激活状态中防滑防空转控制系统减少了牵引力的参考值,Fref.out<Fref.in,F-ΔV线(曲线倾斜部分)不停地寻找着最大的可能的牵引力。当牵引力Fref.in可以获得时,空转停止并且防滑防空转系统返回监控状态,如图5所示。
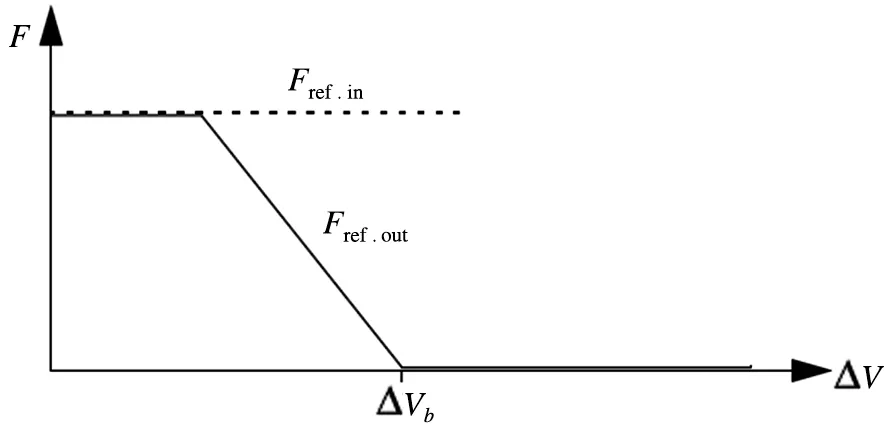
图5 当Fref.out=Fref.in时这个状态变为监控
这个最优化的过程在两个方向中的任意一个方向上慢慢改变ΔVb。只要Fref.out在增长,则在同一方向上的移动就将继续。当它减少时,移动方向就改变。在Fref.out上可能有小的但很快的变化。由于这些改变可能会引起许多不希望的方向的改变,因此只有在合适时间段中的Fref.out平均值被考虑(例如:1秒)。如图6所示。
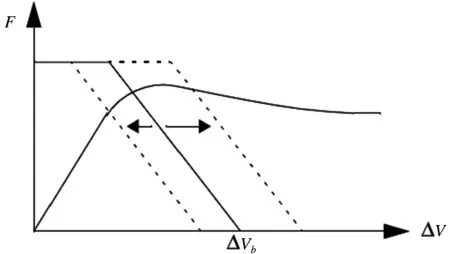
图6 在Fref.in减少或黏着增加以后,系统又变为监控状态
2 结语
防滑防空转是城轨车辆不可缺少的控制方式,好的控制方法不仅能有效防止滑行的产生,还能在提高制动效率的基础上,充分利用轮轨间粘着,缩短制动距离。因此,为适应我国城市轨道交通发展的需要,防滑兼轮轨粘着利用,必将提高制动性能的发挥。
