基于DSP 的运动控制器研究
2013-06-01夏晓俊
夏晓俊
(广东省机械技师学院,广东广州 510450)
0 前言
运动控制器在轨迹控制当中具有定位精度高的优点,在数控机床、激光加工、机器人以及柔性制造系统等领域得到了非常广泛的应用。它具备较高的实时性要求,同时满足较多的输入和输出接口需求,还能够完成各种状态的监测和控制。本文选用TI 公司TMS320F28335 芯片作为本运动控制器的核心处理器,它的优势体现在数值处理及计算方面,因此特别适合用于本运动控制器轨迹规划运算及伺服控制运算。
1 系统的总体结构设计方案[1-3]
本运动控制器总体框图设计如图1 所示,各个主要组成部分具备如下功能:DSP 芯片模块负责PI 控制算法及直线、曲线插补功能运算;D/A转换模块负责把数字信号转换为模拟信号,传送给伺服驱动电机;编码器反馈处理模块负责测定转速;串口负责和上位机进行通讯。

图1 运动控制器硬件结构框图
2 系统的硬件设计方案[4-5]
本系统硬件设计原理图如图2 所示。晶振复位电路,给DSP 提供工作时钟信号,电源监控芯片SP708S负责给DSP芯片提供复位信号,以提高系统的可靠性。光电耦合电路用来隔离运动控制器与外部的强电信号,对输入信号和输出信号进行抗干扰处理,提高系统的抗干扰性和稳定性。运动控制器DSP 通过高速光耦电路通讯,经过D/A 芯片MCP4922 输出电压,电压经过放大电路后,转换为输出范围-10 V~+10 V 的模拟电压传送给伺服驱动系统。
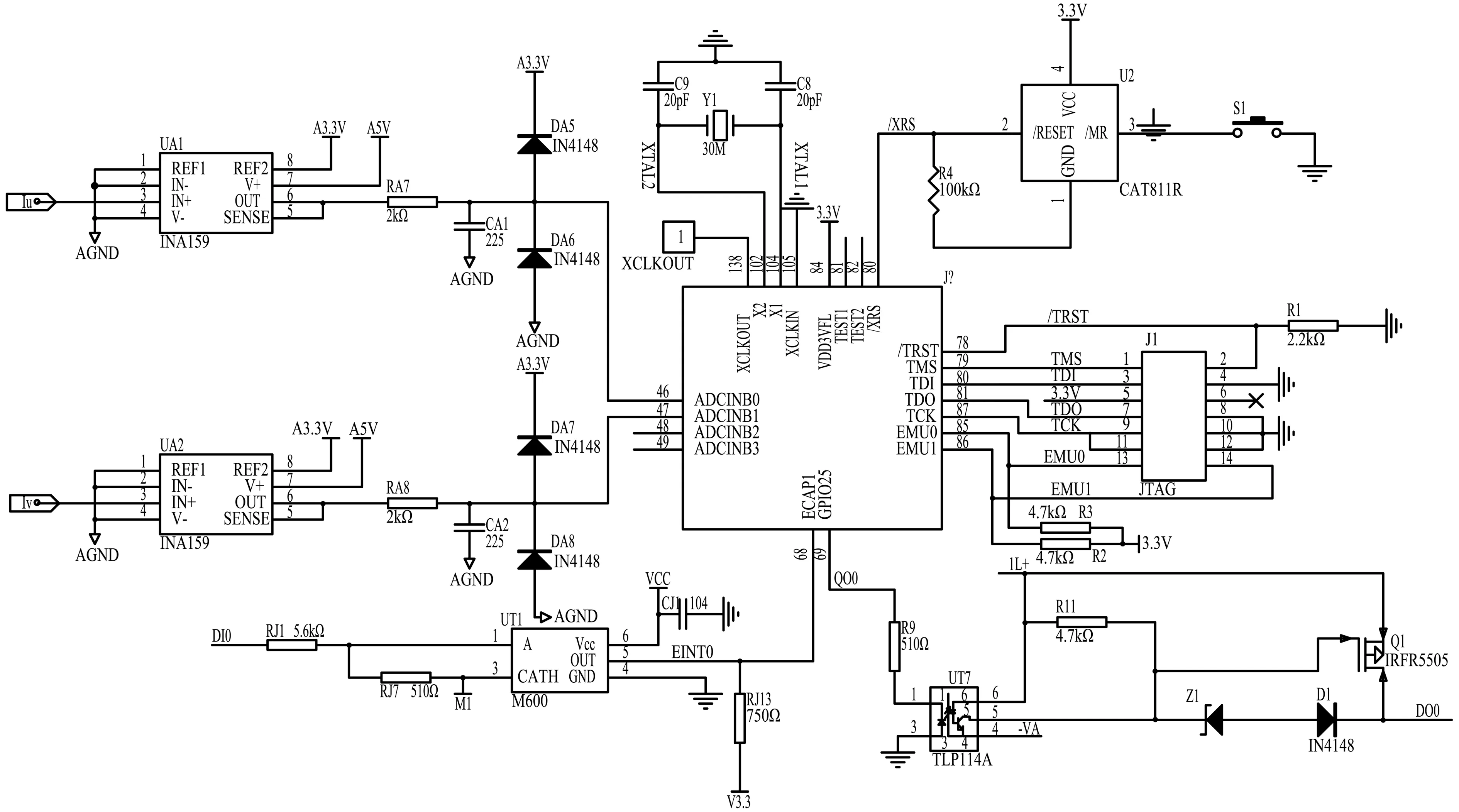
图2 系统的硬件设计方案
3 系统的软件设计方案[6-7]
软件设计主要由位置控制程序、串行通信程序、插补程序以及D/A 转换程序等模块设计组成。软件设计开发工具采用德州仪器公司提供的Code Composer Studio3.3 软件开发环境,用C 语言进行程序编写,主程序流程图如图3所示。
主程序通过调用具备特定功能的子程序来实时控制运动轨迹,利用全局变量和系统工作状态的跳变进行选择执行或交换变量信息。各模块程序实现的特定功能为:数据预处理程序实现数据采样、直线圆弧插补和三次B 样条曲线插补迭代运算之前的插补准备计算工作,完成S 曲线的加减速运算。加减速运动控制程序实现对指令进给速度进行S 曲线加减速处理,保持加工速度平稳过渡。增量光电编码器反馈坐标轴位置实时采样信号,并与插补程序产生的位置增量值比较,算出跟随误差。PI 控制算法通过对误差进行计算处理,得到的进给速度指令经DAC转换成模拟电压后传送到伺服驱动器,驱动各轴伺服电机运行。
4 PI控制算法设计[1,7]
PI 调节器可以分为位置式控制和增量式控制。DSP 是采用采样取值控制方式,它根据采样时刻的实时值计算控制量,因此可以选用一系列采样时刻点K表示连续的时间t,得出离散的位置式PI控制算法表达式为:

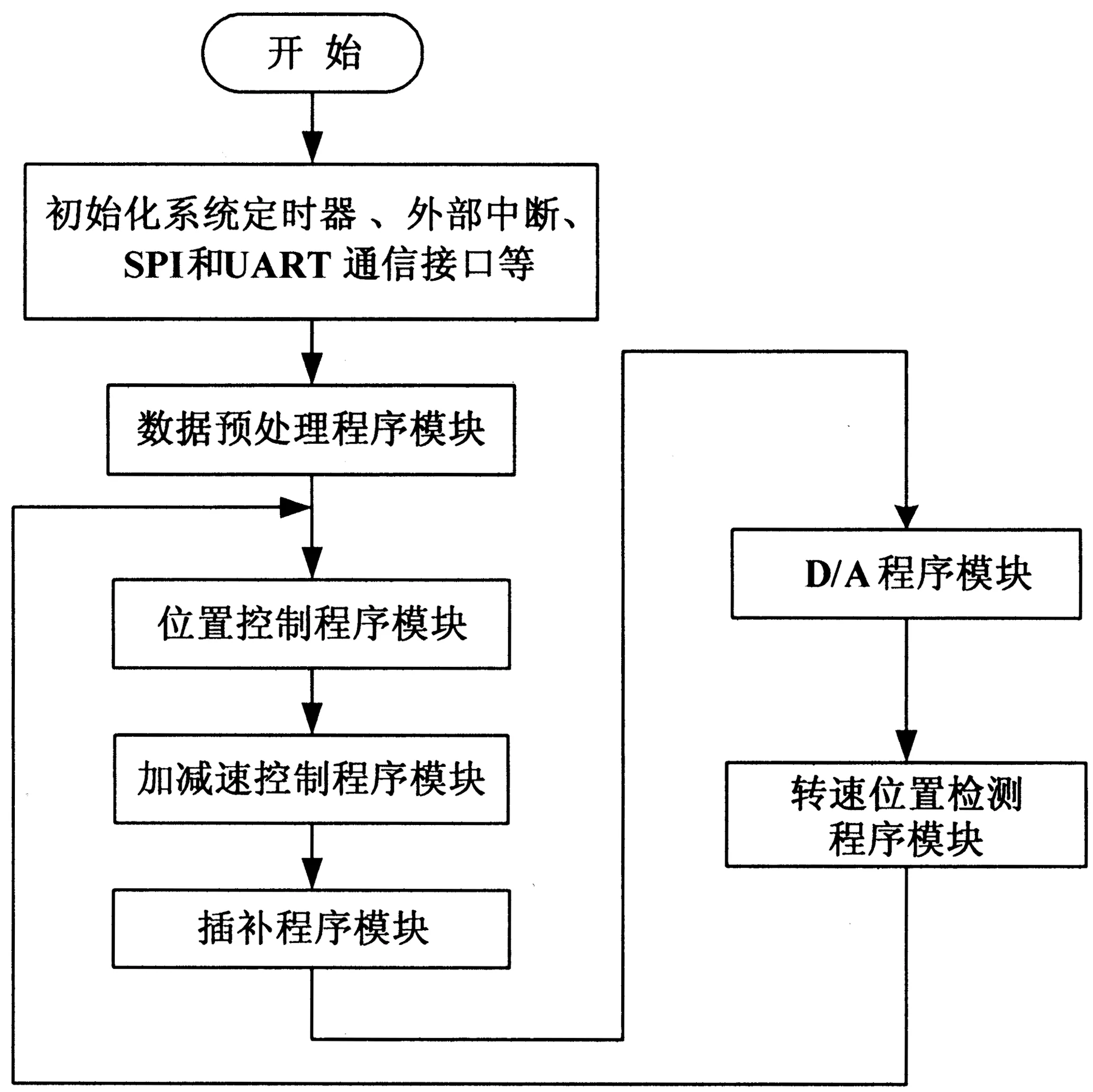
图3 主程序流程图
其中i=0,1,2……表示采样序列,u(i)表示第i 次采样时刻PI 调节器的实时输出值,e(i)表示第i 次采样时刻输入的偏差值,kq为积分系数,kp为比例系数。
位置式PI调节器计算过程中每次都要对进行累加,因此容易产生积分饱和的情况,导致执行机构位置发生大幅度变化,造成控制对象的不稳定的。因此采用增量式PI控制算法,根据(1)式可得:

增量式PI控制的是执行机构的增量,每次计算与前次的计算结果u(k-1)相减得到本次的控制输出,计算错误时产生的影响较小,稳定性得到提高。
5 结束语
该运动控制器设计具备控制接口丰富、集成度高、响应速度快、调速范围宽、稳定性好、抗干扰能力强等技术指标特点,可以达到工业自动化控制的技术指标要求。
[1]谢万德.基于DSP的多轴运动控制器的研究[M].杭州:浙江大学出版社,2002.
[2]熊权洪.基于CAN总线的独立运动控制器的设计与研究[D].武汉:武汉理工大学,2007.
[3]刘松国,朱世强,王会方.多轴运动控制器研制及其在机械手上的应用[J].机电工程,2011 (5):556-559.
[4]扈宏杰.DSP 控制系统的设计与实现[M].北京:机械工业出版社,2004.
[5]谭建成.运动控制专用集成电路及应用[J].微电机,1994(1):19-25,47.
[6]王潞刚,陈林康,曾岳南,等.DSP C2000 程序员高手进阶[M].北京:机械工业出版社,2005.
[7]张崇巍.运动控制系统[M].武汉:武汉理工大学出版社,2002.
