喷浆机械手轨迹控制研究
2013-06-01曹国军
曹国军
(青海黄河水电再生铝业有限公司,青海西宁 811600)
喷浆机械手广泛应用于需要喷浆支护的工程中,特别是铁路公路隧道、水利水电建设、地铁、矿山巷道和各种地下建筑等的施工与支护[1]。轨迹控制对机械手的工作效率,运动平稳性有重要意义。非对称缸具有体积小,制作简单成本低等优点,因此作为驱动元件被广泛应用于电液比例控制系统中[2-5]。各国学者对阀控非对称缸电液位置控制系统开展了一系列的研究,如Taco J.Viersma提出了非对称缸采用非对称阀控制消除阀换向瞬间在系统中出现的“压力跃变”的研究方法[6];国内学者李洪人、赵继云等人对非对称阀控制非对称缸进行了理论分析和实验研究[7-12]。
本文采用阀控非对称缸驱动喷浆机械手的关节,PID 控制算法校正系统,通过MATLAB/simulink 进行机械手轨迹控制仿真分析得到喷枪的轨迹。结果表明:喷枪的轨迹可以满足工作要求,采用电液比例控制系统控制喷浆机械手是可行的。
1 电液比例控制系统数学模型
如图1 所示电液比例位置控制系统原理,主要由电液比例阀、比例放大器、数字控制器、液压缸—负载构成。
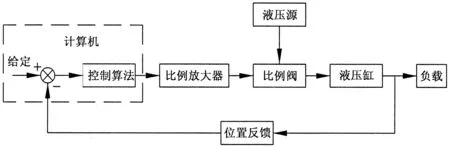
图1 电液比例控制系统原理图
其工作原理为:比例减压阀接收到控制器电压控制信号U1后,驱动换向滑阀产生与电压值成比例的位移,即产生一定的开口度或开口面积,使工作执行装置(液压缸)产生相应的位移量;同时编码器及位置传感器测出反馈信号的电压U2与输入电压U1(目标值)比较,进行误差计算ΔU=U2-U1,经放大器后(电流信号)加载到电液比例阀上,实现闭环反馈控制。改变输入信号的极性,即可改变电液比例阀的输出流量的方向,以改变执行装置的运动方向。
1.1 比例放大器环节
电液比例阀电—机械转换器的频宽远小于比例放大器的频宽,因此比例放大器环节可以看作比例环节,传递函数为:

式(1)中,I—比例放大器输出电流,A;
U—经控制器转换而成的电压信号,V;
Ka—比例放大系数,A/V 。
1.2 比例阀环节
阀芯位移Xv对输入电流I的传递函数为:
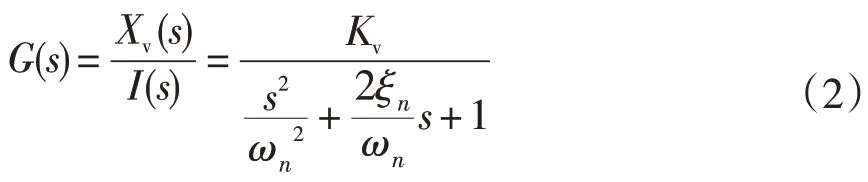
式(2)中,ωn—衔铁组件的固有频率,rad/s ;
ξn—衔铁组件无因次阻尼比;
Kv—阀芯位移增益,m/A。
1.3 阀控非对称液压缸环节
阀控非对称液压缸的动力机构如图2所示。
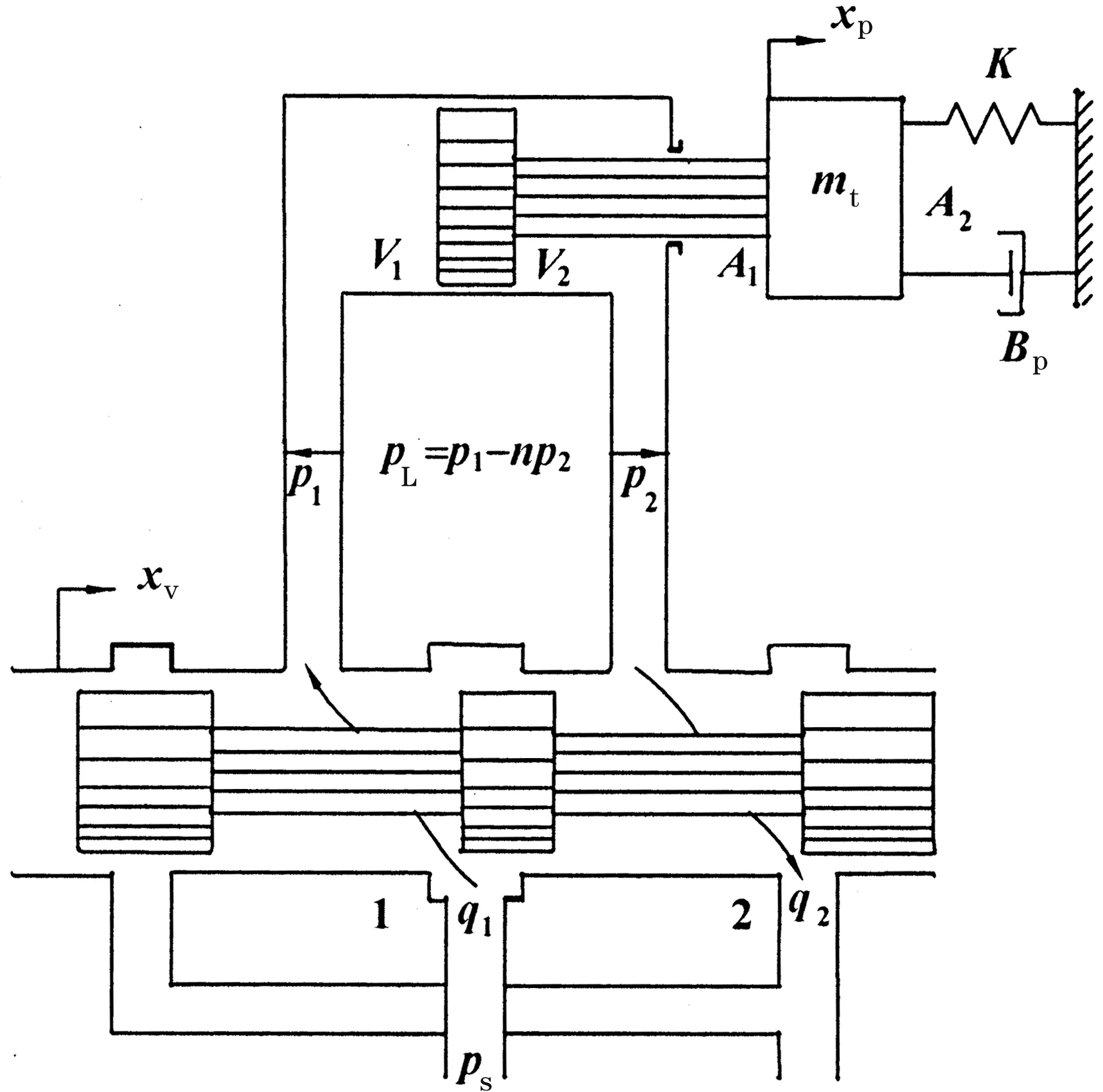
图2 阀控非对称缸结构图
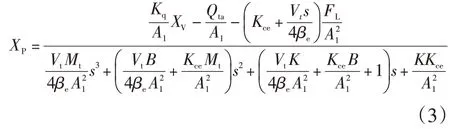
式(3)中,Kce——总流量压力系数,m5/N·s ,且Kce=Ctc+Kc;Qta——附加泄漏流量,m3/s ,且Qta=CtaPs。

1.4 反馈环节
系统采用位移传感器检测的信号作为反馈环节,位移传感器频宽远大于系统的频宽,因此可以将该反馈环节看作比例环节,其传递函数为:

式(5)中,U—反馈电压,V;
Km—反馈放大系数,V/m;
XP—液压缸活塞位移,m。
传递函数方框图如图3所示。
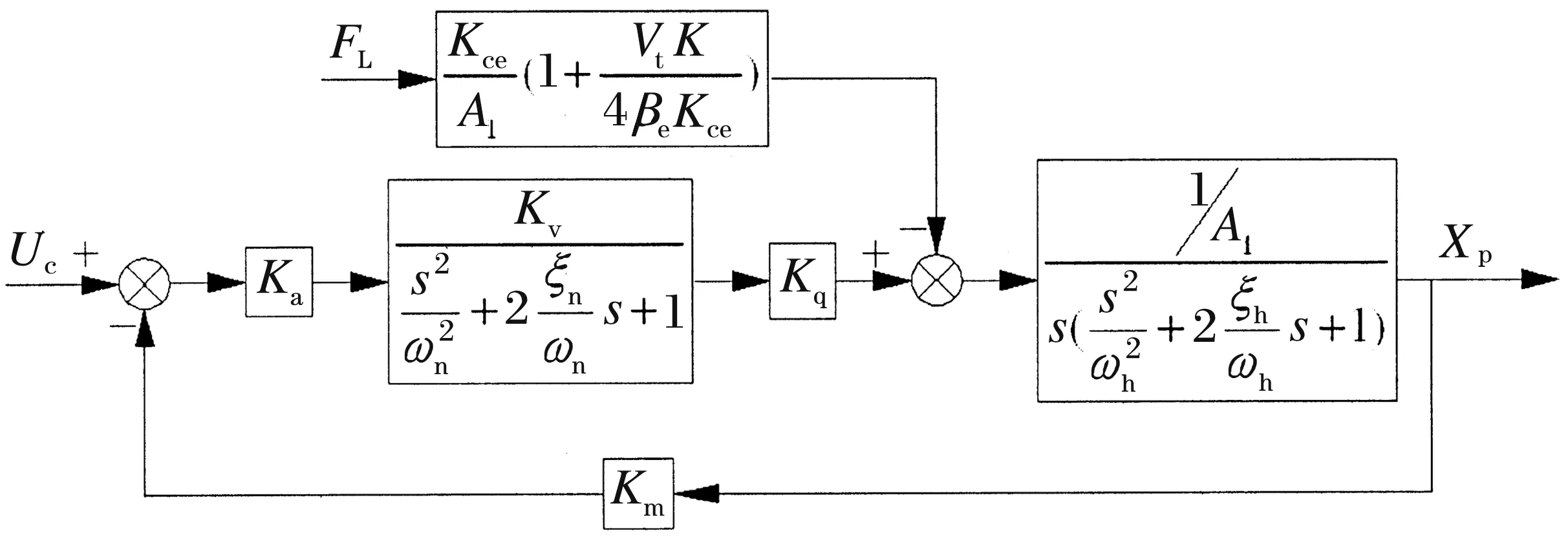
图3 电液比例位置控制系统传递函数方框图
2 各环节参数的确定
系统的供油压力Ps=25 MPa ,液压油的密度ρ=8.48×102kg/m3,液压油运动粘度ν=1×10-5m2/s ,有效体积弹性模量βe=700 MPa。
比例阀选用BoschRexroth 公司的4WRE6E16-2X/G24K31/AV 型电液比例阀,比例阀的流量增益为Kv=Q额/I额=3.65×10-3m3/s·A ,由样本参数可知,固有频率ωn=108 rad/s ,阻尼比ξn=0.65。
以大臂举升油缸为例,液压缸直径D=125 mm ,活塞杆直径d=70 mm ,行程为L=740 mm ,无杆腔面积A1=1.23×10-2m2,有杆腔面积A2=8.42×10-3m2,活塞及负载折算到活塞上的总质量为mt=500 kg 。流量比为η=0.69,等效容积Vt=1.10×10-2m3,液压固有频率ωh=277 rad/s ,液压阻尼比为ξh=0.15。比例阀的流量增益Kq=4.1,总的流量压力系数Kce=8.3×10-10(m3/s)/Pa。
本系统选取用VT-5006 型比例放大器,放大增益为 Ka=0.2 A/V ,反馈放大系数为Km=1 V/m。
因此可得传递函数为:

3 PID参数的整定
整 定PID 参 数 为 Kp=100 ,Ki=0.5 ,Kd=0.01。增加PID 控制器后和原系统的单位阶跃响应比较如图4所示。
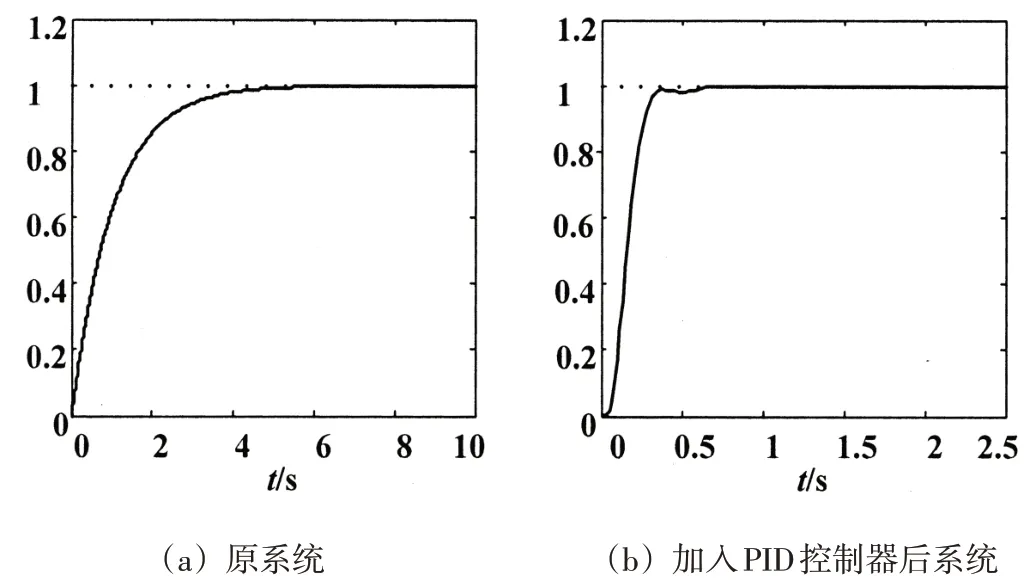
图4 单位阶跃响应比较
4 轨迹PID控制仿真
根据所确定的PID 控制参数,采用MATLAB/Simulink 建立模型对大臂举升油缸、大臂伸缩油缸以及小臂伸缩油缸三个电液比例控制系统分别进行轨迹跟踪仿真,跟踪第三章规划的轨迹。仿真结果如图5~8所示。

图5 小臂伸缩油缸活塞位移
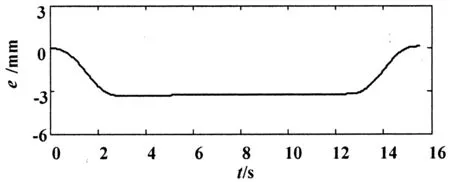
图6 小臂伸缩油缸活塞位移误差
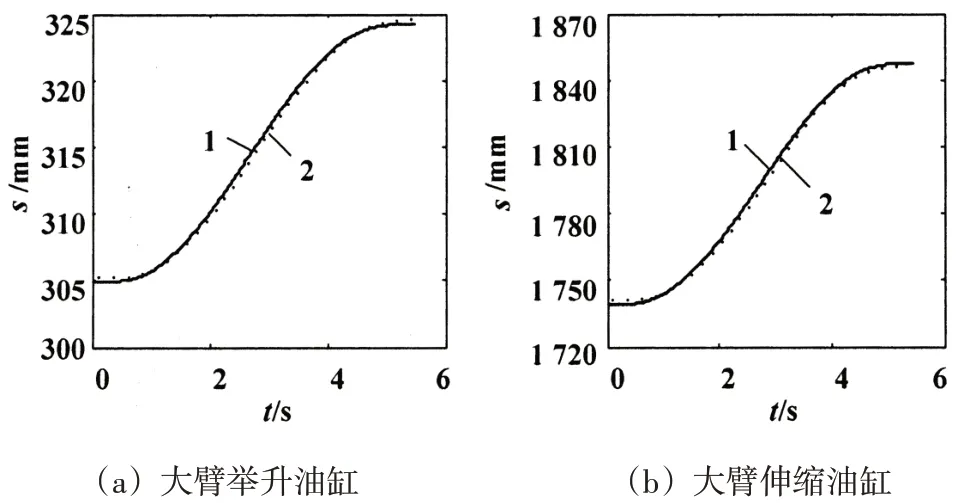
图7 活塞位移
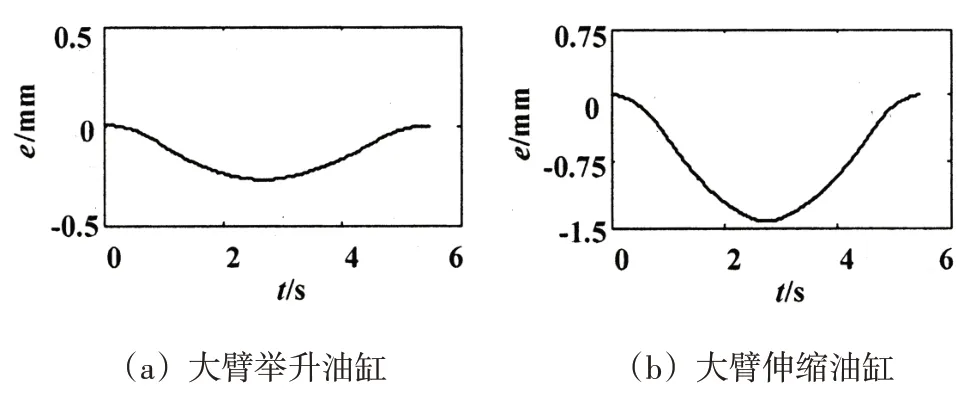
图8 活塞位移误差
5 结论
对电液比例位置控制系统进行建模得到系统的传递函数,在此基础上采用PID 控制器对系统进行校正,运用仿真软件MATLAB/Simulink 对规划的机械手轨迹进行轨迹控制仿真,仿真结果表明采用电液比例控制系统引入PID 控制后可以保证所需喷浆机械手轨迹较准确的实现,满足喷浆机械手的工作要求。
[1]Garshol K F,Zieqler C.Computer controlled application of shotcrete:A status report [A]//10th International Conference on Shotcrete for Underground Support[C],September 12-16,2006,Canada.United States:American Society of Civil Engineers,2006:368-378.
[2]张飞,童朝南,彭开香,等.液压位置控制系统的自适应补偿[J].机械工程学报,2005,41 (5):94-97.
[3]朱兴龙,周骥平,罗翔,等.一种新型三自由度液压伺服关节的动力学模型[J].东南大学学报:自然科学版,2004,34(1):33-37.
[4]张新禾,张宏.PQ 阀控液压系统动态特性模拟[J].机电工程,2011(1):47-50.
[5]徐海军,潘存云,谢海斌,等.水下仿生推进器阀控液压摆动关节建模与动态特性分析[J].国防科技大学学报,2010,32(6):116-121.
[6]Taco J.Viersma.Analysis Synthesis and Design of Hydraulic Servosystems and piplines [J].ESPC,1980:55-57.
[7]赵继云,柴光远,李昌熙.非对称伺服阀静态特性的理论研究[J].机床与液压,1995(05):275-278.
[8]赵继云,钟廷修.零开口非对称四通阀特性的理论研究[J].机床与液压,1998(02):35-37.
[9]许贤良,丁雪峰,杨球来.非对称伺服阀控制非对称液压缸的理论分析[J].液压与气动,2004(03):16-18.
[10]王春行.液压控制系统[M].北京:机械工业出版社,1998.
[11]刘常年.非对称伺服油缸的动态研究[J].机床与液压,1985(01):1-10.
[12]王栋梁,李洪人,张景春.非对称阀控制非对称缸的分析研究[J].济南大学学报,2003 (02):118-121.
