模糊控制器的设计及其在隧道风机控制系统中的应用
2013-06-01汤先驰
汤先驰
(上海电器科学研究所,上海 200063)
0 引言
在现代工业控制系统中,PLC因其可靠性高、抗干扰能力强、指令丰富、维护方便等优点,在进行逻辑控制方面的应用十分广泛。将PLC丰富的指令功能与模糊控制算法相结合,对一些复杂的非线性系统进行模糊控制,能达到较好的控制效果。本文着重介绍了模糊控制器的设计步骤,以及不同模糊控制器的应用场合。以隧道风机控制系统作为应用实例,通过在PLC上编程来实现模糊控制算法。一方面利用PLC的稳定性和高速计算能力,不用单独使用模糊控制芯片,这样降低了模糊控制系统的成本;另一方面可以用模糊控制技术来优化风机控制系统,使得风机开启和关闭更加智能化以此来提高通风效率,降低运营成本。
1 模糊控制器的设计步骤
1.1 结构设计
结构设计是模糊控制系统的核心,它的好坏直接影响到模糊控制系统的精度。一般来说模糊控制器的结构由五个部分组成,分别是模糊化接口、数据库、规则库、推理算法和解模糊接口[1],如图1所示。
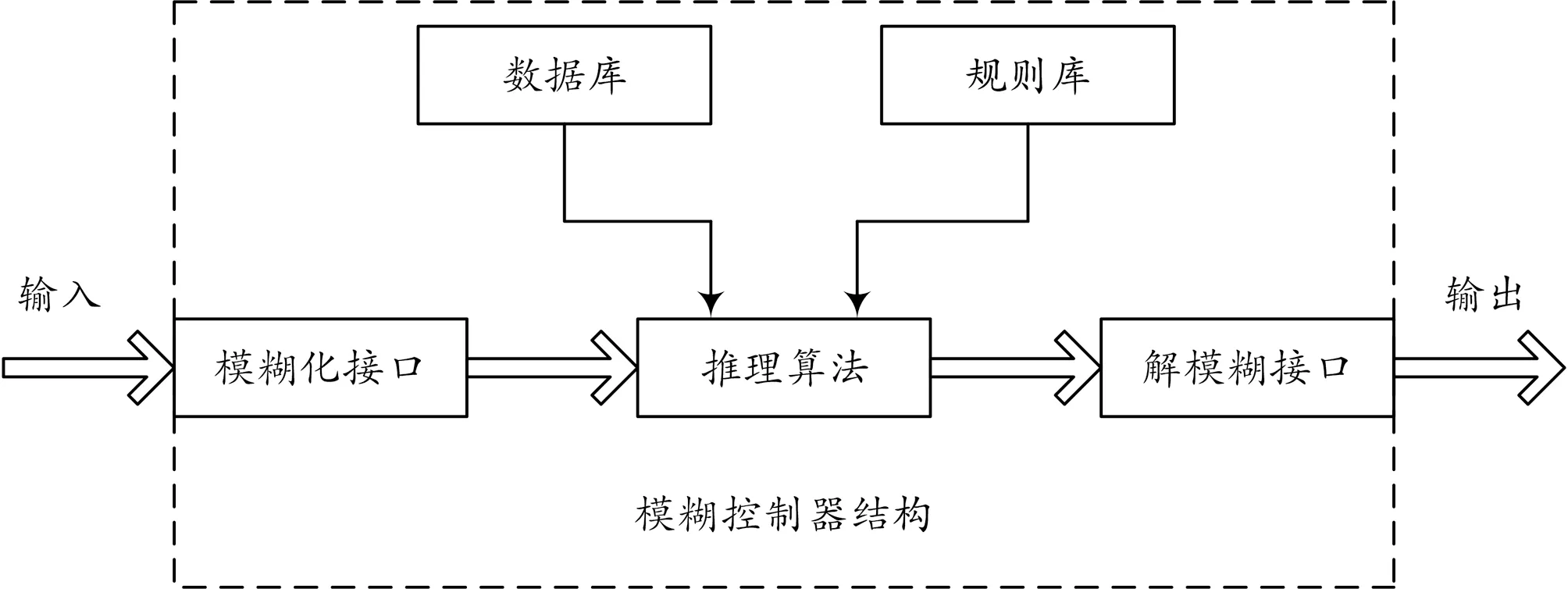
图1 结构组成
1.2 参数选择
模糊控制系统参数主要包括模糊语言集的选择、模糊等级选择以及隶属函数的选择。模糊控制也可以说是一种语言控制,正是因为这些模糊语言所能包含的信息量更大、更灵活,所以对一些不能用二义性(是或不是)的词汇来描述的变量来说,用模糊语言更能够表达准确的意思。通过模糊语言将一个确定量输入转换成一个模糊矢量[2]。隶属函数反映了某个模糊语言子集在其相应论域中对所取值的隶属程度。针对不同的系统需选择不同的隶属函数,这样才能正确反映模糊语言子集的隶属程度关系。但就大多数系统而言,三角形和梯形隶属函数适用最为广泛。如图2 所示,左边为三角形隶属函数,右边为梯形隶属函数。
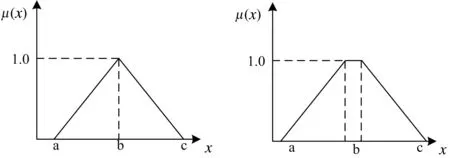
图2 隶属函数图
1.3 规则建立
有了模糊语言集、模糊量化等级和隶属度函数之后就可以建立模糊规则,进行模糊推理。模糊规则的建立也被称为专家经验规则,是通过设计者在对该控制系统进行充分了解之后,为了系统满足想要得控制效果而给出的一系列控制规则[3]。可以说控制规则建立的好坏将直接影响到整个模糊控制系统控制效果的好坏。由于模糊规则是设计者通过自己的经验以及主观判断进行设计的,所以在设计的时候难免会由于自己的某种经验习惯,对规则的建立带来一定的主观倾向性,从而会影响整个规则的建立。所以在进行模糊规则设计是应尽量减少人为影响,遵守基本的设计原则[4]。模糊规则通常是由一系列的关系词连接而成,例如if-then、else、or、also等,如if E is NB and EC is NB then U is PB。
1.4 模糊推理算法
模糊推理是模糊输入量根据一定的推理算法来求解模糊关系方程从而得到模糊输出的过程。在模糊推理中尚未建立一致的理论去指导模糊关系的构造。这就意味着存在多种构造模糊关系的推理方法。一般来说常用的模糊推理方法主要有Mamdani、Lason、Takagi-Sugeno。在这里只介绍Mamdani模糊推理算法。
这种模糊推理算法是根据Zadeh[5]关于模糊算法在复杂系统和决策处理应用中的思想,采用极小运算规则定义模糊蕴含表达的模糊关系。例如模糊集合A 和A*是论域为U 的模糊子集,模糊集合B和B*是论域为V的模糊子集,A→B 看作是从论域U到论域V的一个模糊关系R。应该存在一种算法使得A*与R 合成推理出B*。按照Mamdani模糊推理法:

其中x,y分别为模糊集合A和B在论域U和V上的元素变量。

按照该模糊关系可以推理出B*:

其中〇表示为合成算子的符号,以上为了举例简单只是根据一组规则来说明Mamdani 模糊推理算法的思想,实际时候需把所有规则的推理结果在进行合成才是最终的模糊关系。

在应用Mamdani 型的模糊推理时,每一条规则推理后得到的输出是变量的分布隶属度函数或离散的模糊集合,也就是说还是一个模糊量,需对每一个模糊集合的输出变量进行解模糊化处理,以得到精确的输出。
1.5 解模糊方法
由于通过模糊推理获得的控制输出是模糊语言变量论域上的模糊子集,也就是说还是一个模糊的量,需通过解模糊方法将模糊量变换成精确量然后再进行控制。解模糊方法通常有最大隶属度法、中心法、加权平均法[6]。
2 公路隧道风机控制系统应用实例
2.1 公路隧道通风特点
公路隧道是交通隧道的一种,随着城市交通负担日益增重,为了减少占地面的,尽量少破坏城市植被,修建公路隧道是解决上诉问题的一种好方法。公路隧道由于其特殊的结构,自然风和交通风对隧道内空气置换作用相对较少,隧道内粉尘、车辆尾气、烟雾浓度等将对行车安全、驾驶员特别是隧道内施工维护人员的人身安全带来危险。必须采取适当的机械通风,将隧道内的有害气体及粉尘浓度控制在容许的限度之内。目前国内外在隧道通风控制系统中采用的主要方法有手动控制、时序控制和实时控制[7]。而国内最常用的控制方式是实时控制。其控制方法是通过布设在隧道内的CO 检测器的CO(一氧化碳)值和烟雾透过率检测器的VI(能见度)值,将隧道内当前的值与控制目标相比较,以不超过目标值作为原则,经过计算处理后给出控制方案,实施通风控制。但是由于检测数据的滞后性,以及阀值控制的缺点,控制效果并不好。采用PLC对风机进行模糊控制,利用模糊控制具有语词计算和处理不确定性、不精确性和模糊信息的能力,改善风机控制效果,使之能够用最适合的控制方式使隧道通风系统达到良好的效果,既节约能源又有利于设备维护。
2.2 隧道风机控制系统框图
隧道风机控制系统如图3所示。
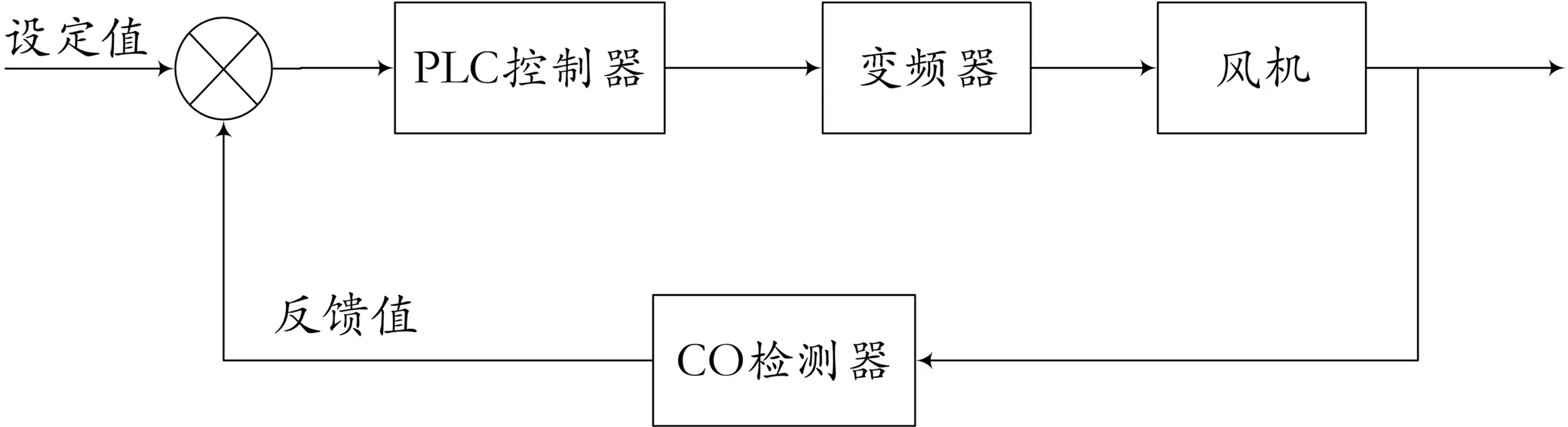
图3 隧道风机框图
2.3 隧道风机模糊控制器结构设计
根据影响风机启停的关键因素,建立两个相互独立的模糊控制器,分别是一氧化碳模糊控制器和能见度模糊控制器。两个控制器均为二维模糊控制器,输入为一氧化碳和能见度的偏差量e及偏差变化ec,输出为开启风机的台数。对于两个控制器输出不一致时,为保证隧道安全性应取两者输出的较大者作为输出。风机模糊控制系统结构如图4所示。
2.4 模糊控制器参数设计
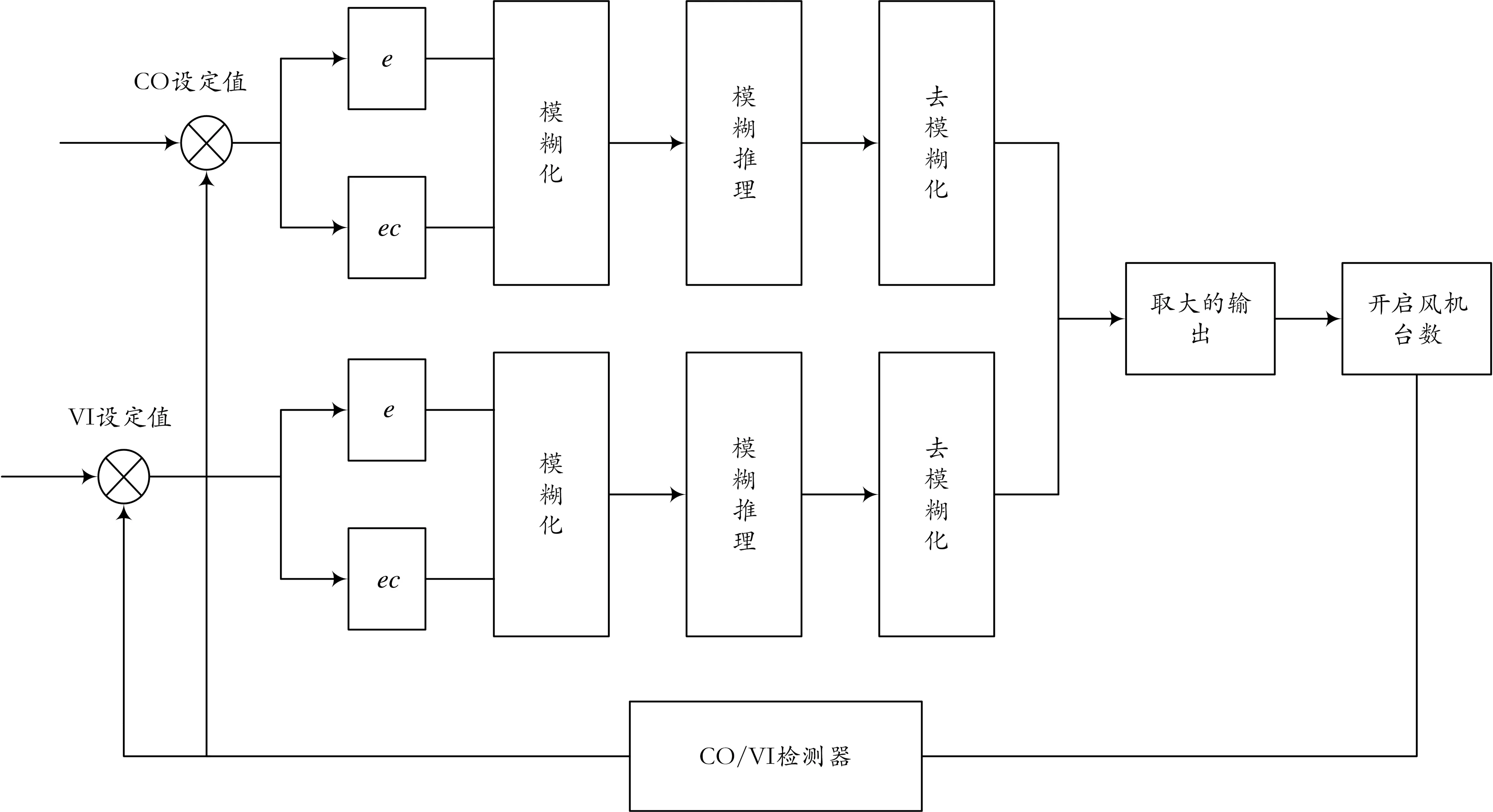
图4 风机模糊控制器结构

表1 CO偏差论域变换

表2 CO偏差隶属度表
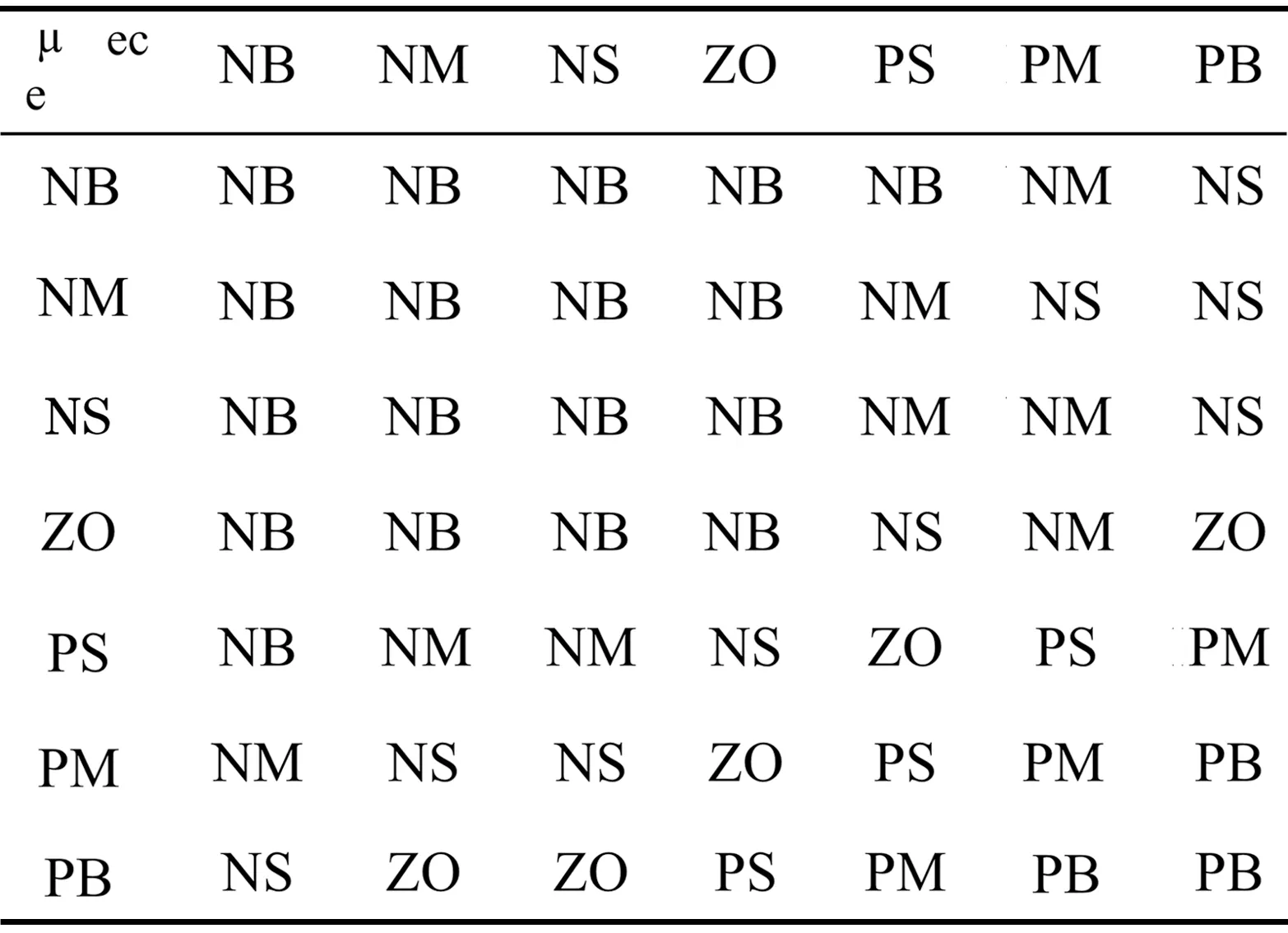
表3 模糊控制规则表
有了模糊化之后的论域,就可以根据实际操作经验,建立模糊化论域的离散值与各语言变量的隶属程度了,即输入和输出语言变量的隶属度赋值表,现只将CO 偏差的隶属度表建立如表2,其它变量的隶属度表[8]也根据实际操作经验写出。
最后在根据实际控制经验,可建立如表3 的模糊控制规则。
2.5 在Matlab上实现模糊控制器设计
Matlab模糊控制工具箱[9]为模糊控制器的设计提供了一种非常便捷的途径,通过它只需要设定相应参数,就可以很快得到所需要的模糊控制器,而且修改起来也非常方便。
对于本案例选择Mamdani 型模糊推理算法,选择重心法作为解模糊的方法,根据前面已经设计好的隶属度函数值,模糊语言集、模糊等级可建立如图5和图6所示的隶属度函数图。

图5 CO偏差隶属度函数图
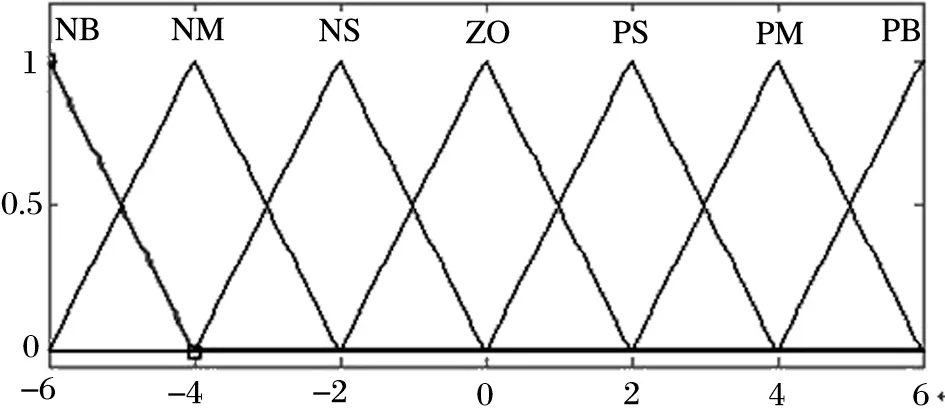
图6 风机开启台数隶属度函数图
根据表3 建立的模糊规则以及按照前面描述的Mamdani 模糊推理算法,可得模糊控制查询表,按照四舍五入列表如表4。
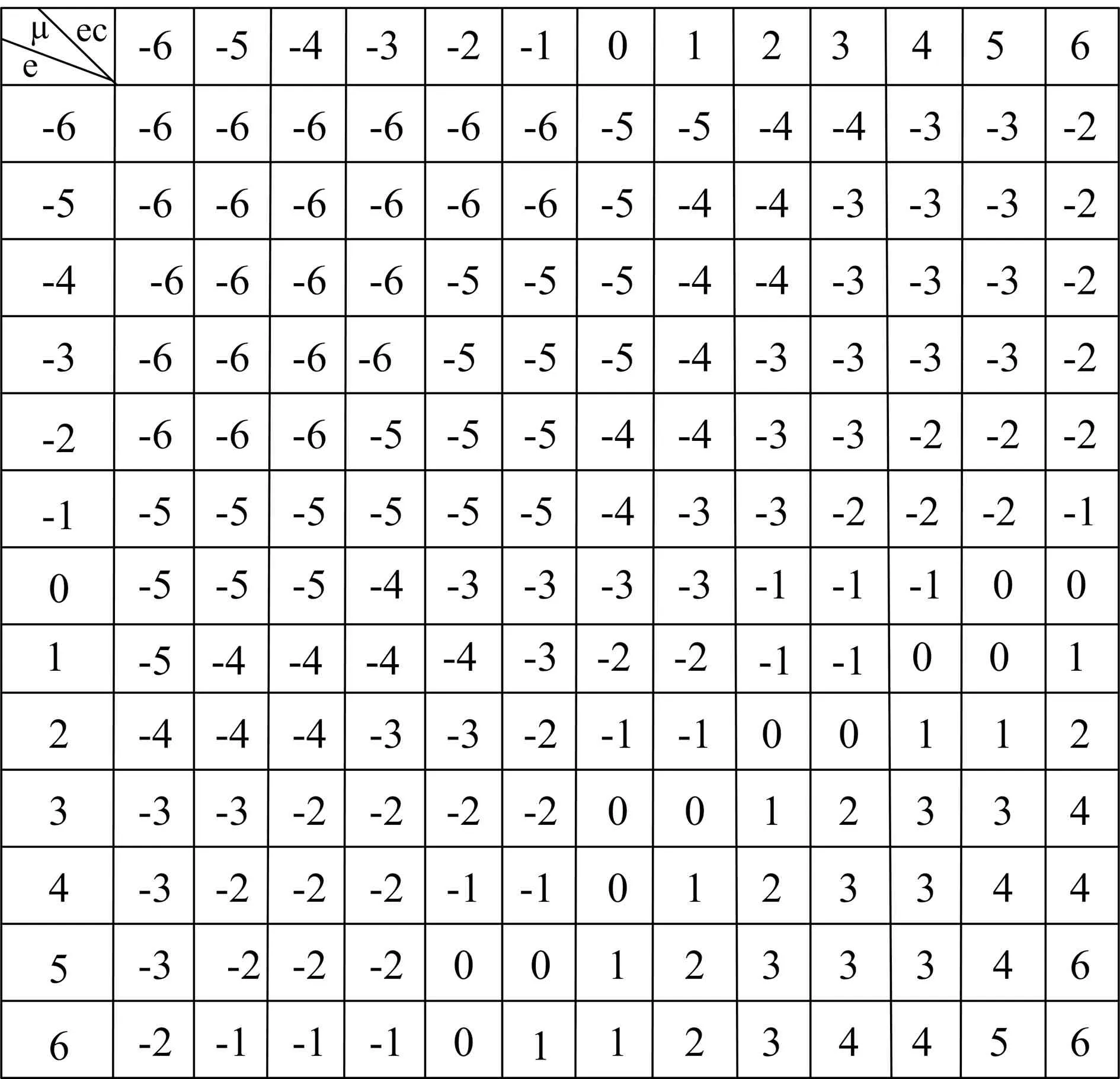
表4 模糊控制查询表
2.6 模糊控制算法在PLC上实现
在实际应用中,用来实现模糊控制的方式一般有硬件实现和软件实现两种。硬件实现是利用专用的模糊控制芯片来实现模糊控制。主要产品有美国TIL公司的FC110和FCA,日本欧姆龙公司的FP-3000 和FB-30AT 等。采用硬件来实现模糊控制优点是推理速度快,控制精度高,缺点是成本高,使用范围有限制。另一种方式是用软件来实现,就是利用编程的方式来实现模糊控制算法,本案例中就是利用罗克韦尔MicroLogix1400作为硬件平台[10],利用软件编程来实现模糊控制算法。在用PLC进行模糊控制算法实现的过程中,关键步骤是输入精确量的模糊化以及模糊控制查询表的查询,解模糊化只用将输出乘以比例因子然后在加上9 即为实际风机开启台数。对于输入精确量的模糊化程序可根据表1 的数据,通过比较指令将输入精确值与论域离散值进行一一比较,就可将精确值变换到模糊论域中。对于模糊控制查询表功能的实现相对比较复杂,对于本例模糊控制查询表为13×13 的矩阵,按照从上到下,从左到右的顺序依次将169个数据放入到N7:0 到N7:168 寄存器中。然后建立查询关系式,为了编程方便可先将模糊控制查询表输入的论域偏移6,即e和ec的取值论域为[0,12],通过观察可知μ=13ei+ecj,其中i,j=0~12,这样就建立了输入与输出的对应关系。例如当输入偏差为3,偏差变化为6时,按照查询关系式可知输出为第45 个寄存器内的值,即N7:45,然后在用MOV指令将相应的值移动到输出寄存器内就完成了模糊控制查询表的功能。部分程序如图7、8、9 所示。
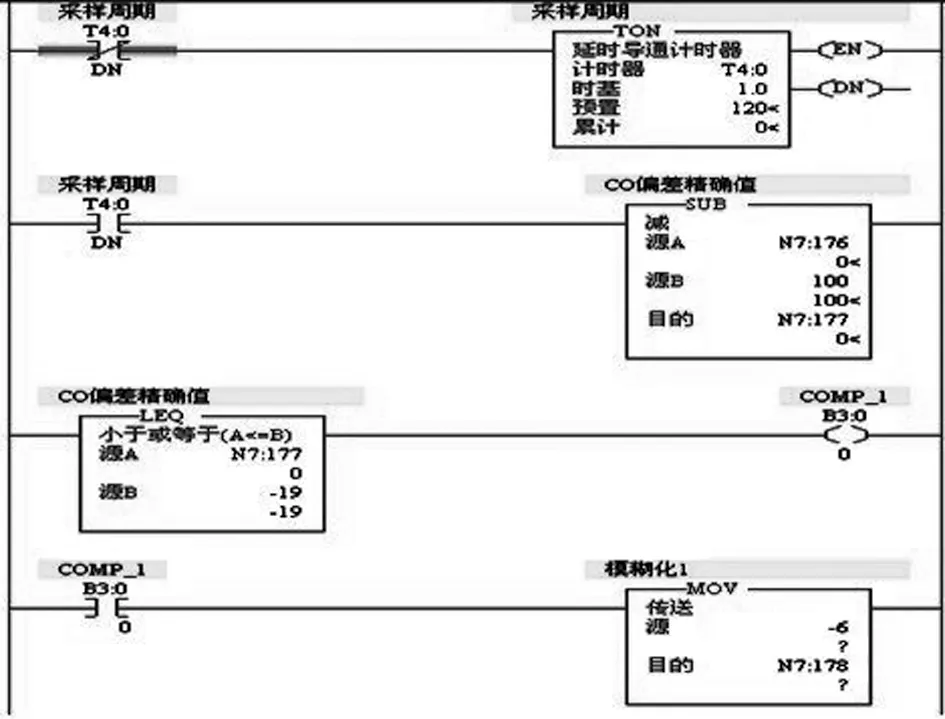
图7 输入量模糊化部分程序
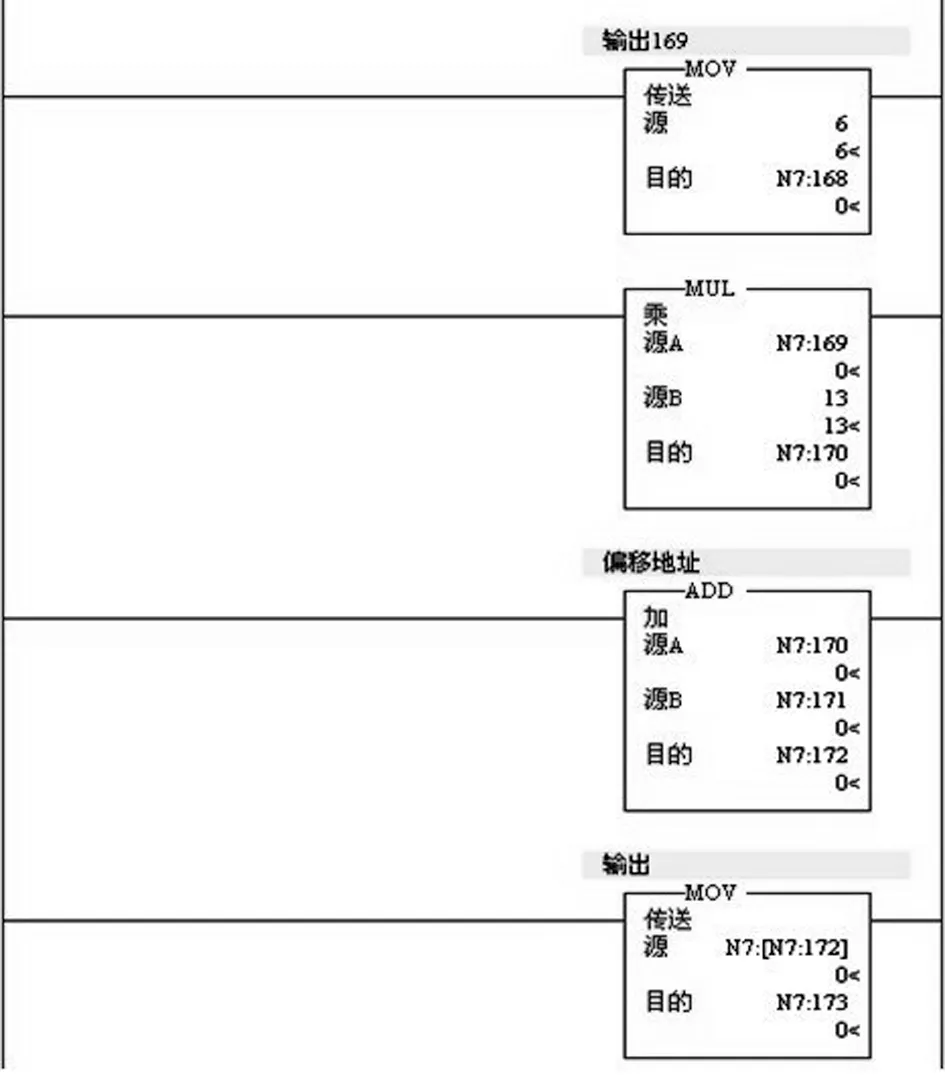
图8 模糊控制查询表部分程序
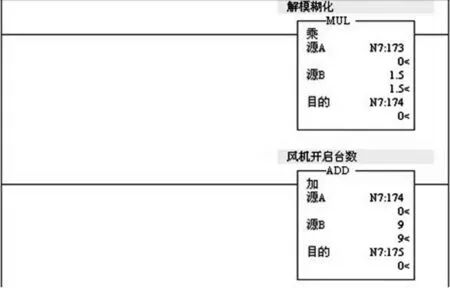
图9 解模糊程序
3 结束语
用PLC来实现隧道风机的模糊控制,一方面利用PLC可靠性高、抗干扰能力强的特点,另一方面对隧道风机进行更为智能的控制,有效避免了风机频繁启动,在一定程度上降低了隧道运营成本,具有很高的推广价值。
[1]诸静.模糊控制原理与应用[M].北京:机械工业出版社,1995.
[2]丁永生.智能技术及其应用[M].北京:北京科学出版社,2009.
[3]章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,1999.
[4]易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,2002.
[5]L.A.Zadeh.Fuzzy Sets [J].Information and control,1965(8):338-353.
[6]李士勇,夏承光.模糊控制和智能控制理论与应用[M].哈尔滨:哈尔滨工业大学出版社,1991.
[7]赵忠杰.公路隧道机电工程[M].北京:人民交通出版社,2007.
[8]廉小亲.模糊控制技术[M].北京:中国电力出版社,2003.
[9]徐昕.MatLab工具箱应用指南:控制工程篇[M].北京:电子工业出版社,2000.
[10]MicroLogix 1400可编程控制器[Z].2008.