一种用于自平衡两轮车的锂电池管理系统设计
2013-05-29汤宁平王建宽劳永建
王 榆 汤宁平 王建宽 劳永建
(福州大学电气工程与自动化学院,福州 350108)
自平衡两轮车是一种新型的交通工具,与传统的电动自行车和摩托车车轮前后排列的方式不同,它采用两轮并排的方式,通过陀螺仪和多个传感器及相应的控制算法,在判断人体重心的基础上来驱动电机,以实现车辆的自平衡及前进、后退、转弯等各种控制。它在正常行驶过程中,都能自动保持平衡,而前后轮排列方式的车则需要驾驶者来控制车辆的平衡。它还具有绿色环保、转弯半径为零、控制方便简单的特点,未来将在许多场合得到广泛应用。作为两轮车的动力能源,锂电池具有工作电压高、能量密度大、自放电率低、无记忆效应等显著优点。在保证足够的续航能力的同时,使用锂电池将有助于减小整车体积和重量,因此对锂电池的管理系统的研究也有重要的意义。本设计中所用锂离子电池正极材料为磷酸铁锂,标称容量为2.2Ah,标称电压为3.6V,通过3 并13 串的方式组成容量为6.6Ah 的电池组。
电池管理系统(Battery Management System,BMS)是指通过监控和管理电池,来提高电池的利用率,防止电池出现过充电和过放电等情况,以达到延长电池使用寿命的目的,并记录电池状态信息,它能为自平衡两轮车的整体系统决策提供判断依据。
1 系统结构
BMS 应具有电池数据采集、信息传递、故障诊断、均衡管理及电量估算(SOC)等功能。本设计中的BMS 分为以下几个部分:数据采集模块、均衡管理模块、故障管理模块和电量估算模块,系统框图如图1所示。
主控芯片用的是Microchip 公司的PIC18F66K80,该控制芯片采用16 位的类精简指令系统(RISC)、哈佛总线结构和两级流水线取指令方式,它丰富的资源和强大的功能,可在满足系统要求的同时大大简化了硬件电路[1-2]。
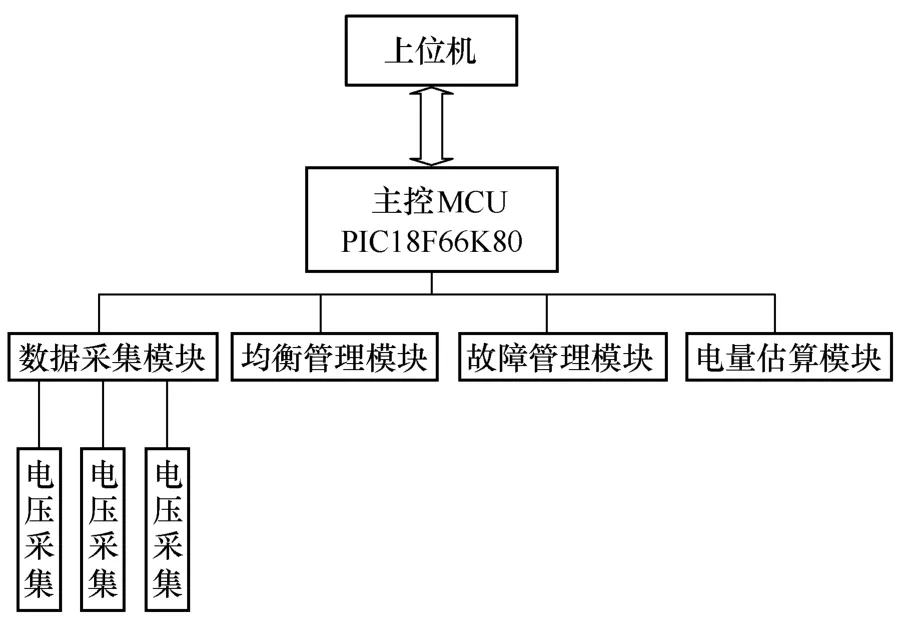
图1 BMS 系统框图
1.1 数据采集模块的设计
系统中各模块所需电源均来自电池组,通过DC/DC 变换得到,首先用LM5008 电路得到一个7.5V 电压,再通过可调微功耗电压调节器LP2951得到5V 电压,而MOSFET 驱动电路电源通过555定时器产生自举电源得到,其电源模块如图2所示。
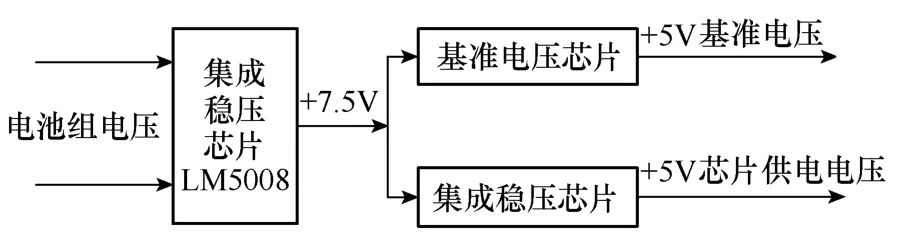
图2 电源模块示意图
为提高SOC 的估算精度,电流采样采用两种不同放大倍数的采样通道,以提高电流的采样精度,充放电电流流过同一个采样电阻,根据电流范围,采样电阻取5mΩ、5W。
温度采样电路采用阻值为10kΩ的负温度系数采样NTC 电阻,通过分压电路得到的电压值可算得相应的温度值,电路如图3所示。
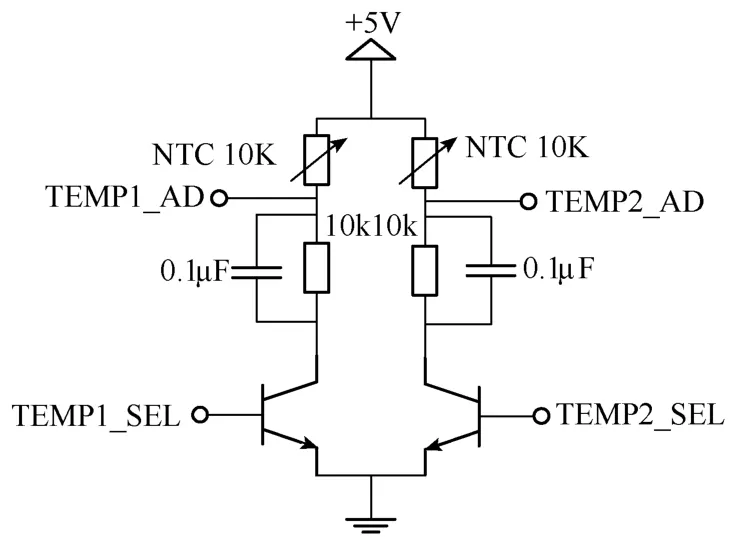
图3 温度采样电路
该电阻温度特性可以近似用下式来表示:

式中,RT、RN分别表示NTC 在温度T(K)和额定温度TN(K)下的电阻值(Ω);T、TN为温度,单位K(TN(K)=273.15+TN(℃));B称为B常数,是热敏电阻特定的材料常数,这里取B=3380。
本设计采用查表的方式来得到温度值,表中存储对应-40~127℃的128 个RT电阻值,而且NTC热敏电阻的实际特性,只能粗略地用指数关系来描述,所以这种方法只能以一定的精度来描述所测得的温度值。
1.2 均衡管理模块
由于电池组中各个单体电池之间存在不一致,若不采用均衡控制,经连续的充放电循环后,会导致单体电池之间的差异越来越大,将会对电池造成永久性的损坏[3],且电池组的实际充放电容量得不到有效利用,所以锂电池均衡管理技术的研究对于最大化利用电池组的容量和延长电池使用寿命具有重要的意义。
目前锂电池均衡电路根据均衡过程中电路对能量的消耗情况,可分为能量耗散型和能量非耗散型两大类[4]。能量耗散型主要通过在每节电池上并联一个分流电阻,这样电压较高的电池可通过分流电阻放电,其缺点为能量损耗高,效率较低,而优点是可靠性高,电路结构简单且成本低廉。对于能量非耗散型的均衡方案,目前国内外的研究主要集中在两个方面:开关电容法和DC-DC 变流器法,可实现能量在相邻电池中传递,其优点为损耗很少,而缺点是电路结构复杂,控制方法也较为复杂,且可靠性不强[5]。
本设计采用的是能量耗散型均衡电路,以第一串4 节电池为例,如图4所示,通过控制均衡使能引脚BAL_A—BAL_D,有选择地控制分流电阻上的电流,合理设计电阻R1—R4的阻值,可使均衡电流小于100mA。

图4 第一串电池均衡电路
1.3 故障管理模块
本设计的故障管理模块包括电池组的过电压状态、欠电压状态、充放电过电流状态、高温和低温告警、低容量状态,以及单体电池的过电压、欠电压。由于电池在使用过程中,容量、内阻会发生一些变化,因此对于电池组如果在循环过程中采用固定的故障状态判断,则会在循环后期使得这些保护值远大于设定的范围,导致安全性问题,而且电池组在不同的温度下的放电曲线差异较大,尤其在低温环境下,如果统一设定放电截止电压,电池组放出的容量太少,因此在单片机中存储的电池组各个保护阈值应能随着循环寿命和工作环境温度的不同而进行相应的调整,这样才能使得电池组的安全性问题得到更好的解决。
1.4 电量估算模块
目前国内外对电池的荷电状态SOC(state of charge)较为认可的是从电量角度定义,如美国先进电池联合会在其《电动汽车电池实验手册》中定义SOC 为:电池在一定放电倍率下,剩余电量与相同条件下额定容量的比值[6]。SOC 的准确估计是整个管理系统良好实现的基础,它是电池使用过程中的重要参数,它对充分合理利用电池容量并避免损伤电池有着重要意义,在自平衡两轮车的实际使用中,它的最直观作用就是能够判断车子的续驶里程,相当于汽车上“燃油表”,表示电池的剩余能量。
常用SOC 估算方法主要有放电实验法、Ah 计量法、开路电压法、内阻法、线性模型法、神经网络法、卡尔曼滤波法等[7]。本设计拟采用的是一种综合的电量估算方法,是以Ah 计量法和开路电压法为基础,通过建立锂电池Thevenin 模型(图5),结合sigma-point 卡尔曼滤波方法,并充分考虑冲放电率、温度及自放电等多种因素的影响,对电量估算进行补偿,从而得到较为精确的SOC 估算值。
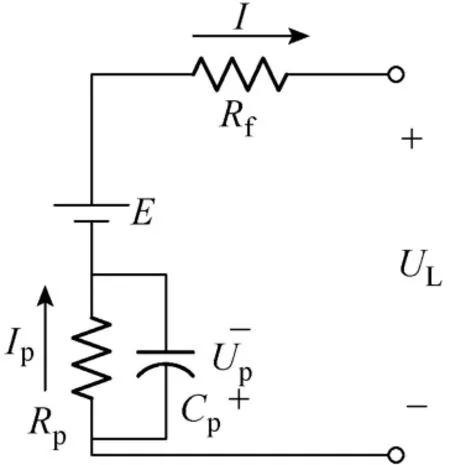
图5 Thevenin 电池模型
Thevenin 模型中:E表示电池电动势;Rf是电 池的欧姆内阻;Rp是电池的极化内阻,它与电容Cp并联构成容阻回路,用于模拟电池极化过程中表现出的动态特性。
在Thevenin 模型基础上结合Ah 计量法,可得到如下数学模型:
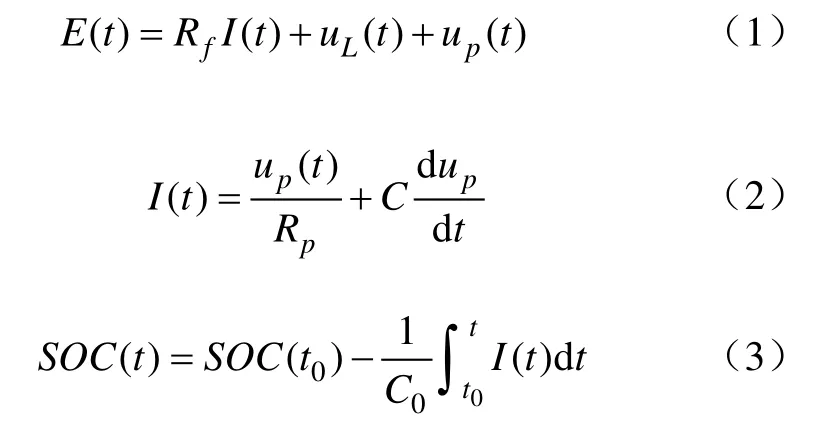
式中,SOC(t)表示t时刻电池的荷电状态,C0是电池初始时刻的容量。
1)冲放电倍率补偿
根据多轮的充放电循环试验数据表明,在充电过程中,实际充电效率大概在98%,因此在SOC 估计中,可取充电效率因子μSOC=0.98。电池以不同倍率恒流放电时,放出的电量是不同的,电流越大,放出的电量越少。图6是放电电流分别为1C、0.5C、0.25C 时的SOC 和时间曲线。
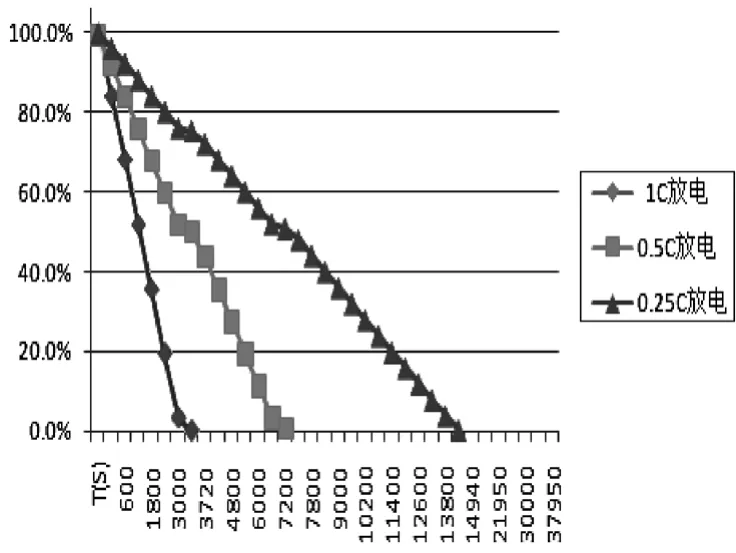
图6 不同放电倍率下SOC-时间曲线
描述电池容量和放电电流关系[8],目前广泛使用的是Peukert 方程,即

式中,C、i、t分别为电池容量(Ah)、放电电流(A)和放电时间(h),n为与电池类型有关常数,K为与活性物质有关常数,为求常数n,K,用两种不同放电电流进行放电,可得求得n和K的值,这样就可得到任意放电倍率下的容量C。
2)温度补偿
电池组的工作温度范围为-20~60℃,本设计所用电池组的可用容量受温度影响较大,温度越低能放出的容量越少,其低温性能下降主要是因为锂离子电池在温度较低时内阻会剧烈增加。反之,在高温环境下,电池内部化学活性物质活动增强,充分的反应使得更多的化学能转化为电能,导致电池组的可用容量增加。通过实验可以得到锂电池在不同温度下的容量曲线,再将当前放电温度下电池组的可用容量折算到25℃下的有效容量,当温度变化时,对照容量曲线对电池组的可用容量进行补偿修正。
3)自放电及循环寿命补偿
电池的自放电现象指:电池在充满电后,在没有与外界电路接触条件下,随着静置时间的增加,其容量会自然减少。静置环境温度也将影响电池的自放电程度,在实际使用时,要根据实验得到的自放电特性曲线,对电池组的可用容量进行修正。最后,电池容量还会随着电池循环次数的增加而衰减,因此一个精确的SOC 估算系统也应将循环次数的影响考虑在内。
2 试验数据及分析
本设计试验装置实物图如图7所示,由电池组保护板及NBT 电池测试设备组成。为了方便测得用与估算SOC 曲线对比的实际SOC 曲线,设计了以下试验:使用NBT 电池测试系统,设置为恒流1C放电,通过上位机可监测整个放电过程,其记录的数据可测得实际放电SOC 曲线,再将其与管理系统中综合估算法得到的曲线进行对比分析。

图7 试验实物图
系统总体流程图如图8所示。
上电之后先完成单片机的初始化,在延时一定时间保证完成数据采集工作后,因为故障诊断中的各项阈值设定与电池的循环次数有关,所以系统首先进入循环寿命更新模块。系统若发生故障,则关断数据采集模块,并显示、输出相应的故障代码,否则根据是否充电来决定是否进入均衡模块,由于放电过程的实时均衡控制复杂且难以实现,本系统仅在充电过程中进行均衡。电量估算模块主要完成电量估算和显示剩余电量功能,在对工作电流进行工作状态判断后,若为工作状态则继续数据采集循环,否则进入自放电计量模块。

图8 系统软件流程图
图9为实际SOC 曲线和综合电量估算法得到曲线。在t=360s 时,电池实际SOC 为80.70%,而根据综合估算法得到的估计值为79.04%,误差约为1.66%;在t=2520s 时,电池实际SOC 为32.45%,估算值为31.39%,误差约为1.06%;该款自平衡两轮车初始SOC 设计精度为5%,而本试验结果表明综合估算法的精度可以满足两轮车的实际使用需要。
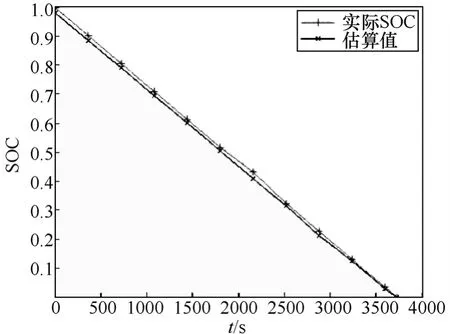
图9 实际SOC 和估算值曲线
3 结论
本文提出了一种实际的BMS 设计方案,并介绍了其中各个模块的功能和系统总体软件流程图,其中电量估计是管理系统的难点,而试验表明本设计所采用的综合估计法可达到预定的SOC 估算精度要求。
[1] 刘和平.PΙCl8FXXX 单片机原理及接口程序开发[M].北京:北京航空航天大学出版社,2005.
[2] 杨国宇,顾威.基于PΙC18F458 单片机的数据采集和通讯[J].工业控制计算机,2006,19(9): 3-4.
[3] 孙德权.空间锂离子蓄电池的特点及其管理模式[J].电源技术,2005,10(1): 57-60.
[4] 雷娟,蒋新华,解晶莹.锂离子电池组均衡电路的发展现状[J].电池,2007,37(1): 62-63.
[5] 冯卓民,张哲,陈敏,钱照明.锂离子电池均衡电路的比较[C].中国电工技术学会电力电子学会第十一届学术年会,2008.11.
[6] 林成涛,王军平,陈全世.电动汽车SOC 估计方法原理与应用[J].电池,2004,34(5): 377-378.
[7] SABΙNE P,MARΙON P,ANDRESS J.Methods for state-of- charge determination and their application[J].J Power Sources,2001,96(1): i13-120.
[8] DOERFFEL D,S.A.SHARKH.A critical review of using the Peukert equation for determining the remaining capacity of lead-acid and lithium-ion batteries[J].Journal of Power Sources,2006,155: 395-400.
