一种基于UKF的MEMS/GPS组合导航算法
2013-05-28刘明雍张立川高沛林
刘明雍, 郭 勇, 张立川, 2, 高沛林
一种基于UKF的MEMS/GPS组合导航算法
刘明雍1, 郭 勇1, 张立川1, 2, 高沛林1
(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 水下信息与控制重点实验室, 陕西 西安, 710072)
针对微电子机械(MEMS)/全球定位(GPS)组合导航系统中, 强非线性引起的扩展卡尔曼滤波(EKF)导航精度不高、滤波性能不稳定、收敛速度慢等问题, 研究了MEMS/GPS组合导航系统无迹卡尔曼滤波(UKF)算法, 避免了EKF繁重的求导计算。本文对2种滤波方法进行了仿真比较, 结果表明, 用UKF的组合导航系统的误差收敛速度比EKF快, 精度也比EKF高, UKF算法更适合于MEMS/GPS组合导航。
微电子机械/全球定位组合导航系统; 扩展卡尔曼滤波; 无迹卡尔曼滤波
0 引言
在计算机技术高速发展和低价惯性器件不断涌现的背景下, 微电子机械系统(micro-electro- mechanical systems, MEMS)和GPS组合导航系统成为众多领域导航技术的首选, 其关键技术是多传感器信息最优递推融合算法。标准卡尔曼滤波在线性系统、高斯分布等假设的基础上得到了一个最优滤波算法[1-2], 但是大部分实际系统都包含非线性环节, 属于非线性系统。非线性系统滤波问题可将非线性系统进行线性化, 然后应用线性系统滤波法,即广泛应用的扩展卡尔曼滤波(extended Kalman filter, EKF)法。巴塞罗那自治大学的Quinchia, Alex和Carles等人最近就利用EKF方法对MEMS误差模型进行了分析与研究[3], 虽然结果也保持了卡尔曼滤波的优点及计算上有效地迭代更新, 但实际应用中对弱非线性系统效果较好, 对强非线性系统则容易发散, 且线性化过程存在高阶项截断误差, 计算Jacobian矩阵时计算量大易出错等缺陷, 因此需要寻找更加适合实际应用和精度更高的算法。
为解决以上问题, 本文将Juliter和Uhlmann提出的无迹卡尔曼滤波(unscented Klaman filter, UKF)方法引入到了MEMS/GPS组合导航系统的滤波中[4-5], 这种滤波方法以UT(unscented transform)变换为基础。比起在组合导航中应用广泛的EKF, 优点如下。
1) 对非线性函数的概率密度分布进行近似, 而不是对非线性函数进行近似, 即使系统的模型复杂, 也不增加算法实现的难度;
2) 所得非线性函数统计量的准确性可达3阶(泰勒展开);
3) 不需要计算Jacobian矩阵, 可以处理不可导非线性函数。
Saeedi Sara和EI-Sheimy将UKF方法运用到惯性导航系统(inertial navigation system, INS)和GPS组合导航系统中, 取得了较好的导航精度[6]。同时李涛等学者也将UKF方法应用到INS/GPS组合导航系统中, 并与EKF方法进行比较, 仿真结果表明, UKF在精度和收敛性方面要优于EKF[7]。本文则将UKF滤波方法应用到了MEMS/GPS组合导航系统中, 验证了UKF滤波方法的可行性, 并与EKF方法进行比较, 仿真结果表明, 采用UKF的MEMS/GPS组合导航系统优于采用EKF的组合导航系统, 基本满足低成本, 较高精度, 高可靠性的导航定位要求。
1 组合导航系统非线性模型
1.1 GPS系统误差状态方程的建立



1.2 MEMS/GPS组合导航系统的状态方程
选用东北天地理坐标系为导航坐标系, 组合系统的误差含有MEMS系统的数学平台误差、速度误差、位置误差和惯性仪表误差(陀螺漂移和加速度计随机误差)、GPS系统的位置和速度误差。
导航误差状态方程为

相应的误差方程有

1.3 MEMS/GPS组合导航系统的观测方程


1.4 基于UKF的滤波器设计
UKF不对非线性系统的状态方程和观测方程进行线性化, 而是利用一系列近似高斯分布的采样点, 通过Unscented变换来进行状态与误差协方差的递推和更新, 在每次更新过程中, 采样点都通过非线性误差状态方程进行传播并随着量测方程变换, 此方法的精度不仅比EKF高, 同时还避免了对非线性方程的线性化过程。UKF使用的是离散时间非线性模型, 因此先采用4阶Runger-Kutta法以数值积分的方法将系统模型进行离散化处理得到的系统方程为

2) 计算Sigma点, 设状态变量为维, 计算2n+1个采样点及其权值
3) 时间传播方程




4) 量测更新方程



关于标准UKF方法的具体实现过程, 可参考文献[9]。
2 仿真分析
为评估所建MEMS/GPS组合导航系统的性能, 将前面设计的算法应用到MEMS/GPS组合导航系统, 并且进行了仿真。

图1表明, 仿真到3600 s时EKF滤波算法对经度的估计误差为50 m, UKF滤波算法对经度的估计误差为45 m, 因此UKF对经度误差的估计略好于EKF。
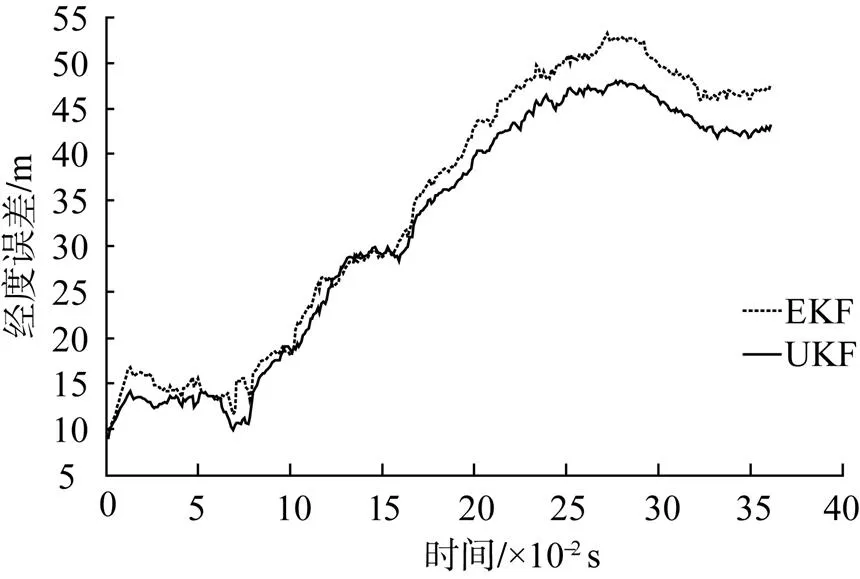
图1 经度误差曲线
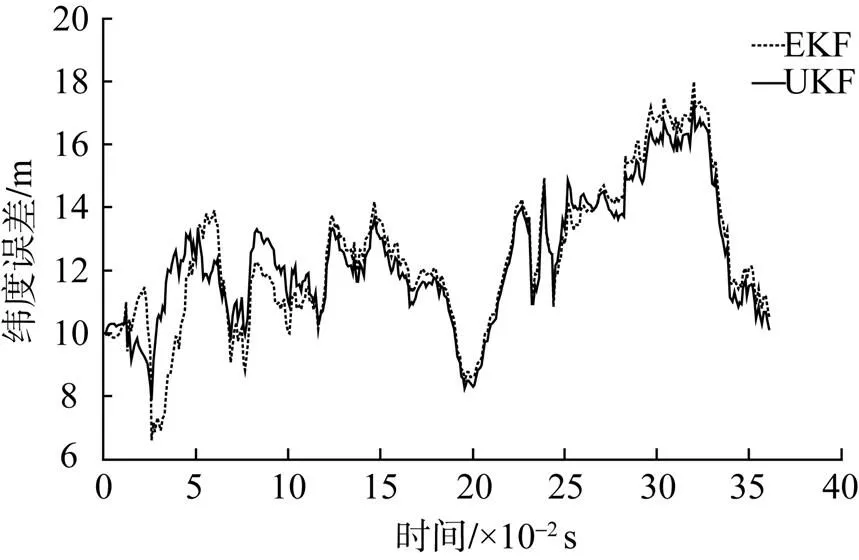
图2 纬度误差曲线
图2表明, 2种滤波算法的纬度误差基本相同, 3 600 s的仿真过程中误差基本保持在18 m以内。
综上所述,选用UKF对组合导航进行滤波实现是一种导航精度较好的导航方法, 能有效抑制由白噪声引起的误差的增量。
3 结束语
本文将UKF滤波方法引入到MEMS/GPS组合导航系统滤波中, 避免了EKF线性化误差对于组合导航系统精度和滤波器稳定的影响, 通过仿真比较了UKF与EKF的滤波效果。理论分析和仿真结果表明, UKF的收敛速度更快, 精度更高, 稳定性更好。在MEMS/GPS系统中应用UKF滤波, 真正实现了低成本、高精度的导航定位要求, 并可有效解决系统非线性加剧而引起的滤波发散问题。
[1] 秦永元, 张洪钺, 汪叔华.卡尔曼滤波与组合导航原理[M].西安: 西北工业大学出版社, 1998.
[2] 曹学伟, 石杏喜, 左常清. 基于EKF的DR/激光测距组合导航算法研究[J]. 山东科技大学学报, 2009(2): 84-87.
Cao Xue-wei, Shi Xing-xi, Zuo Chang-qing. Study on DR/Laser Rangefinder Integrated Navigation Algorithm Based on EKF[J]. Journal of Shandong University of Science and Technology, 2009(2): 84-87.
[3] Quinchia A G, Carles F. Analysis and Modelling of MEMS Inertial Measurement Unit[C]//Localization and GNSS (ICL- GNSS), 2012 International Conference, 2012: 1-7.
[4] Julier S, Uhlmann J K. A General Method for Approximating Nonlinear Transformations of Probability Distributions[R]. Robotics Research Group, Department of Engineering Science, University of Oxford, 1994.
[5] Uhlmann J K. Simultaneous Map Building and Localization for Real Time Applications[R]. U.K: University of Oxford, 1994.
[6] Saeedi Sara, EI-Sheimy. The Merits of UKF and PF for Integrated INS/GPS Navigation Systems[C]//22nd International Technical Meeting of the Satellite Division of the Institute of Navigation, 2009: 1612-1618.
[7] Li Tao, Xu Xiao-su. The Application of EKF and UKF to the SINS/GPS Integrated Navigation Systems[C]//Infor- mation Engineering and Computer Science(ICIECS), 2010 2nd International Conference, 2010: 25-26.
[8] 李涛.非线性滤波方法在导航系统中的应用研究[D].长沙: 国防科学技术大学, 2003.
[9] 张红梅, 邓正隆. UKF方法在陆地车辆组合导航中的应用[J]. 中国惯性技术学报, 2004, 16(4): 20-23.
Zhang Hong-mei, Deng Zheng-long. UKF Method for Land Vehicle Integrated Navigation System[J]. Journal of Chinese Inertial Technology, 2004, 16(4): 20-23.
UKF-Based Algorithm for MEMS/GPS Integrated Navigation System
LIU Ming-yong1, GUO Yong1, ZHANG Li-chuan1, 2, GAO Pei-lin1
(1. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710072, China)
To solve the problems of low navigation accuracy, slow convergence rate and unstable filtering accuracy caused by the strong nonlinearity of the extended Kalman filter(EKF) in micro electro mechanical system/global positioning system(MEMS/GPS) integrated navigation system, an unscented Kalman filter(UKF) is proposed for the MEMS/GPS integrated navigation system. The UKF avoids the heavy derivation in EKF. Simulation results show that the two filtering methods: the error convergence rate of UKF integrated navigation system is faster, the accuracy is higher than the EKF. Comparison between the two algorithms shows that MEMS/GPS integrated navigation system with UKF achieves faster error convergence rate, higher navigation accuracy and enhanced navigation performance.
micro electro mechanical system/global positioning system integrated navigation system; extended Kalman filter; unscented Kalman filter
TJ630.33
A
1673-1948(2013)05-0351-04
2012-12-26;
2013-03-28.
国家自然科学基金(51179156); 国家自然科学基金青年基金项目(51109179); 教育部博士点基金(20106102120057); 西北工业大学基础基金(JC201228).
刘明雍(1971- ), 男, 教授, 博士生导师, 主要从事水下航行器导航与控制的研究.
(责任编辑: 杨力军)
