基于盲源分离和自适应滤波的水下声信号降噪算法
2013-05-28刘巍,滕威,罗松
刘 巍, 滕 威, 罗 松
基于盲源分离和自适应滤波的水下声信号降噪算法
刘 巍1, 滕 威1, 罗 松2
(1. 中海石油(中国)有限公司绥中36-1油田二期调整工程项目组, 天津, 300461; 2. 昆明船舶设备研究试验中心, 云南 昆明, 650051)
在水下小孔径基阵测向应用中, 阵元接收到的连续波(CW)信号质量直接关系到测向误差的大小, 由于受到多径效应、信号起伏和水下背景噪声的影响, 往往实际检测到的信号信噪比较低, 相位估计结果离散性大。本文针对水下CW信号和水下背景噪声特点, 提出了一种基于盲源分离和自适应滤波联合降噪的算法, 该算法对接收的CW信号波形进行降噪以达到提高信噪比的目的。通过算法仿真和湖试试验证明, 经本文算法输出的信号,估计器的输出结果比直接利用信号进行方位估计的结果精度高。
连续波信号; 水下声信号; 盲源分离; 自适应滤波; 降噪
0 引言
水下小孔径基阵测向是水声学的重要应用之一, 其定向思想是通过采用小孔径基阵接收连续脉冲波(continual wave, CW)信号, 再通过各阵元接收到信号的相位差, 计算目标声源的方向, 理论上只需要2个阵元即可解算出水下目标方位。
然而在实际应用中, 水下声环境较为复杂, 水声信号的传播受到多径效应、信号起伏和背景噪声的影响, 波形易发生畸变, 直接导致互谱法相位估计器性能大幅下降, 有时在有其他声源干扰情况下甚至无法估计出目标方位。
针对复杂噪声背景下, 水下CW波信号起伏大的特点, 本文提出一种基于盲源分离和自适应滤波器联合降噪的算法, 该算法思想是通过对小孔径基阵接收到的CW信号先进行盲源分离, 分离出背景噪声信号, 再将该路信号作为参考信号对各路接收信号做自适应滤波, 这样可以在保证原始信号波形相对相位不变的情况下提高信号的信噪比, 有利于提高后续相位差及目标方位估计结果的稳定性。
1 小孔径声测向特点
水下小孔径水听器基阵一般用于被动接收目标发射的CW波声信号, 频率为10 kHz至几十kHz之间。针对接收到的CW信号, 一般采用求解相位差或波束形成等算法完成对目标方位的估计, 由于该定向方式对水下基阵要求不高, 算法简单明了, 所以广泛运用于水声目标方位估计应用中。水下小孔径基阵测向原理如图1所示。
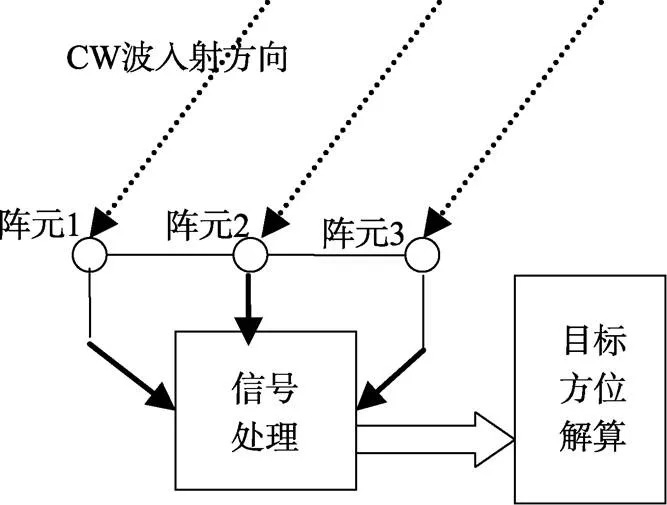
图1 水下小孔径基阵定位原理图
由于小孔径基阵相邻阵元间距较小, 抗噪能力较差, 难以适应水下声环境较为复杂的情况, 一旦海况不好或有其他声源干扰时, 测向精度将大幅下降, 表1为在不同信噪比下互谱法估计的目标方位结果。从表中看出, CW的信噪比直接决定了方位估计器的精度, 所以对水下小孔径定向系统来说, 降低噪声干扰, 提高信号信噪比是十分重要的。

表1 不同信噪比下的连续波信号相位差
2 基于盲源分离和自适应滤波的降噪算法
针对水下CW信号被噪声污染的情况, 本文将提出一种基于盲源分离和自适应滤波联合降噪的算法, 以下以三阵元小孔径基阵为例, 分析讨论该算法流程。

对式(1)的数学模型进行盲源分离, 即是期望找到一个线性变换矩阵, 从而使得输出尽可能独立, 即

其中: 矩阵称为全局矩阵或系统矩阵。
基于负熵最大的ICA迭代算法是一种重要的盲源分离算法, 其目标函数定义为
这里简要介绍算法流程。
1) 令=0, 初始化权向量(0);
2) 对权向量进行调整

3) 归一化处理

4) 如果算法不收敛, 转到步骤2;
5) 算法收敛, 求解出一个独立分量
上式中, 表示分离出来的第1个源信号, 但由于ICA算法分离的不确定性, 所以该信号是噪声或是CW信号需要进一步判断, 这在稍后的算法仿真中可以看出。ICA算法实现原理见图2。
因为CW定向算法以波束形成或互谱法为基础, 保持信号间的相位信息是十分重要的, 为保证在不影响各路信号相位信息的基础上达到降噪目的[4], 可以采用最小均方误差的自适应滤波算法分别对消各阵元接收到的噪声, 由于ICA分离出来的噪声信号和CW波信号相互独立, 所以在自适应对消过程中不会对各阵元接收的CW波信号相位造成畸变, 从而保护各路信号之间的相位信息。
针对上述自适应滤波问题的一个有效解决方案是采用变步长的最小均方(least mean square, LMS)算法[5], 该算法结合了传统LMS算法的优点, 又解决了超量均方误差和收敛速度之间的矛盾。自适应滤波算法一般要求有参考信号, 而且要求参考信号和噪声相关, 与信号尽可能独立, 而ICA盲源分离算法的分离结果正好满足上述要求, 这样, 即可采用分离结果作为自适应滤波器的参考输入。横向自适应滤波器结构见图3所示, 其中的自适应算法采用变步长LMS算法。
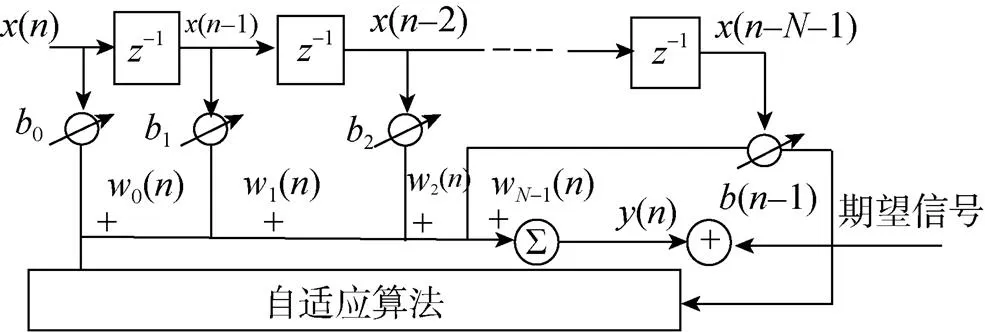
图3 自适应滤波算法示意图
1)=0;
3) 调整抽头系数

5) 如果算法收敛则结束, 否则+1, 转步骤2)。
上述算法中, 参考信号()取盲分离算法分离出来的噪声信号。初始步长系数和调整参数可取经验值。
3 基于ICA和LMS的降噪算法
综上所述, 本文提出的解决水下小孔径基阵定位问题的降噪算法思路如下。
1) 将基阵各阵元接收的信号作为混合信号进行ICA盲源分离;
2) 对盲分离结果进行基频判断, 区分出CW波信号, 其余分离源相加作为干扰噪声;
3) 将干扰噪声作为参考信号, 对各阵元接收到的混合信号进行自适应滤波;
4) 最后将滤波降噪后的信号作为源信号, 采用波束形成或互谱法估计目标方位。
上述算法流程参见图4。

图4 小孔径基阵测向系统示意图
4 算法测试
在所选取的水域中, 采用水下发射换能器发射CW信号, 同时布放小孔径接收水听器基阵接收CW信号, 各阵元接收到的CW信号如图5所示。采用本文降噪算法对该水声信号进行降噪后得到的信号如图6所示。对降噪前后的信号用互谱法估计信号间的相位差, 结果如表2所示, 对比降噪前后结果可以看出, 利用基于盲源分离和自适应滤波联合降噪的算法对信号进行处理, 能提高输出信号信噪比, 从而可以提高估计器的测向精度, 增强结果稳定性。

图5 水听器检测到的CW信号
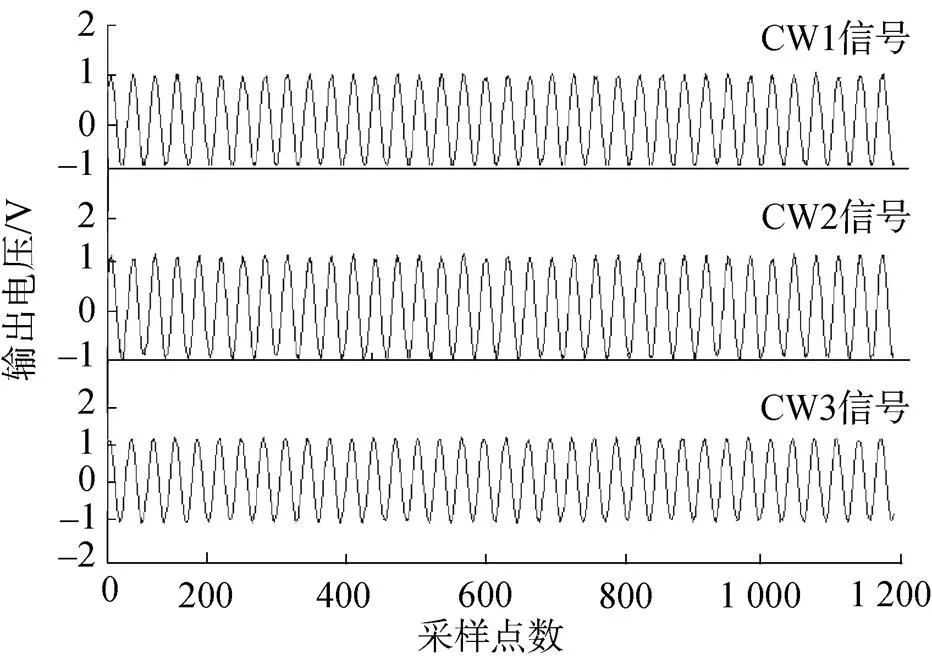
图6 滤波降噪后的CW信号
5 结束语
在水下小孔径基阵测向中, 是否有效估计信号间的相位差直接关系到测向结果是否精确, 在复杂水声环境中信号受到多种因素影响, 为使降噪算法具有一定普遍性, 采用自适应滤波方式无疑是最佳选择之一, 但自适应算法的难点之一是参考信号的选择获取。

表2 采集CW信号相位差计算结果对比
本文结合近年来兴起的盲源分离算法, 对各基阵阵元接收到的信号作为观测信号进行盲源分离, 将分离出来的噪声信号作为参考信号输入自适应滤波器, 既满足了自适应滤波的条件, 又保留了原信号相位特征, 提高了相位估计精度。该联合算法的不足之处是, 需要进行盲源分离和自适应迭代, 整个过程计算时间稍长, 不太适用于实时信号处理, 适用于对时间要求不是特别苛刻的应用场合。
[1] Comon P. Independent Component Analysis, a New Con- cept[J]. Signal Processing, 1994(36): 287-314.
[2] Amari S, Cichocki A, Yang H H. A New Learning Algorithm for Blind Signal Separation. Advances in Neural Information Processing Systems[J]. MIT Press, 1996(8): 757-763.
[3] 马建仓, 牛弈龙, 陈海洋.盲信号处理[M]. 北京: 国防工业出版社, 2003.
[4] 张小华, 彭首峰, 裴浩. 基于盲源分离的语音降噪研究[J]. 湖北工业大学学报, 2013, 28(1): 75-77.
[5] 华强, 夏哲雷, 祝剑英. 一种改进的变步长LMS自适应滤波算法及其仿真[J]. 中国计量学院学报, 2012(3): 304-308.
A Denoising Algorithm for Underwater Acrostic Signal Based on Blind Source Separation and Adaptive Filter
LIU Wei1, TENG Wei1, LUO Song2
(1. SZ36-1 Project Team of China National Offshore Oil Corporation, Tianjin 300461; 2. Kunming Shipborne Equipment Research and Test Center, Kunming 650051, China)
In the application of underwater small aperture array direction finding system, the quality of received continuous wave(CW) signal directly relates to the direction finding error. Due to the influences of multipath effect, fluctuation of signal, and underwater background noise, the actual signal detected is usually in low signal to noise ratio (SNR), and the phase estimation results are significantly discrete. According to the characteristics of the underwater CW signal and background noise, a denoising algorithm based on the combination of blind source separation and adaptive filter is proposed in this paper to improve SNR by denoising of received CW waveform. Simulation and lake trial show that the proposed algorithm gains a higher precision than that of the azimuth estimation method with direct application of signal.
continuous wave signal; underwater acrostic signal; blind source separation; adaptive filter; denoising
TJ630.34
A
1673-1948(2013)05-0347-04
2013-06-26;
2013-07-19.
刘 巍(1968-), 男, 高级工程师, 研究方向为海洋石油工程项目建设.
(责任编辑: 杨力军)
