结合无人机和地面三维激光扫描技术获取高精度DEM及DOM
2013-05-14缪志修林春峰闵世平
杨 锋 缪志修 林春峰 闵世平
(中国中铁二院工程集团有限责任公司, 四川成都 610031)
在获取局部地形数据方面,无人机和地面三维激光扫描技术都具有明显优势。无人机能够快速获取较高平面精度的DOM数据,但其获取得到的DEM高程精度较差[1]。而地面三维激光能够有效的获取高精度的DEM数据,但受视场角的限制,容易出现盲区和漏洞;且在制作地形的DOM方面应用少,相关方面研究主要是利用地面三维激光扫描技术来制作建筑物等立面的正射影像[2]。
1 地面三维激光扫描技术获取高精度DEM
本次实验采用VZ4000地面三维激光扫描仪进行扫描,实验环境最远测量距离为4 000 m,自然环境最远测量距离为2 700 m左右。该设备有四种发射脉冲,分别为50 kHz,100 kHz,200 kHz,以及300 kHz。地面三维激光扫描数据获取过程一般为:现场查看,扫描站点的确定,标靶布设,数据扫描,数据处理几个步骤。
1.1 选站原则
为了利用地面三维激光扫描仪获得地形数据,应该采用如下测站选址原则:
①确保在各扫描位置获得的数据能够覆盖完整的扫描区域;
②在得到完整数据的前提下,应尽量选择较少的扫描站数,以减少搬站次数;
③相邻测站之间必须至少布设4个控制点靶标,并保证这些靶标能在相邻两站扫描中可视;
④确保扫描区域能够扫描到所有控制点靶标。
1.2 标靶布设
为了能够将地面三维激光扫描数据的坐标转换到工程独立坐标中去,需要对扫描的区域布设标靶,并用无棱镜全站仪测出标靶的坐标。为了能够保证转换的精度,至少需要四个及以上的反射片标靶,标靶的布设要均匀的分布在测区周围,且这些标靶不能在同一条线或是同一个面上。另外,标靶的布设不能够太远,太远有可能导致扫描仪没有扫到标靶,太近会影响后期拼接的精度。相关实验表明,一般合适的距离在30 m左右[3]。
1.3 数据扫描
在数据采集阶段,采样间距的设置十分重要,因为采样间隔太太,会影响后期的数据处理、数据存储。另外如果采样间隔太小,则会影响到扫描的精度。对于VZ4000三维激光扫描仪,每站的扫描时间一般控制在6 min左右较为合适。
1.4 数据处理
对不同站点的扫描数据,首先要进行预处理,预处理主要包括去除噪点等。VZ4000的扫描距离根据脉冲频率的不同,其距离也不同,如脉冲频率为30 kHz时,测量自然物体的目标距离可以达到2 700 m左右,但目标距离越远获取的精度就越低。首先需要对获得数据进行滤波,方法可以采用VZ4000自带软件Riscan中的Range gate进行,如图1所示。
对各站的数据初处理后,就可以根据标靶进行不同站点之间数据的拼接。数据拼接的方法有两种,一种是相对拼接,另外一种是绝对拼接。为了能够控制每站坐标转换误差的一致,本次实验采用绝对拼接的方式进行,在RiScan软件中就可以采用如图2中的方法进行。
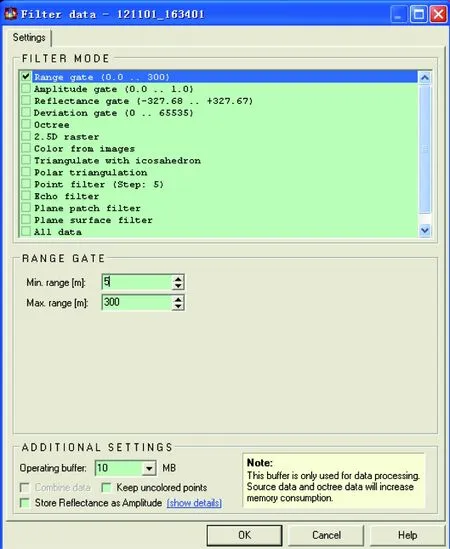
图1 按距离去除点云
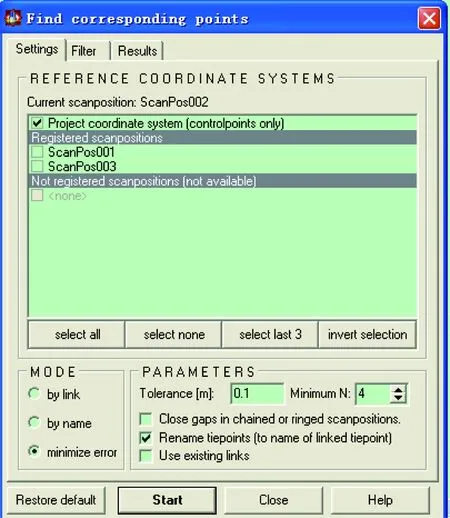
图2 站点拼接
各个站点的数据拼接完毕后,就可以进行滤波分类处理。图3为滤波后得到的DEM数据。
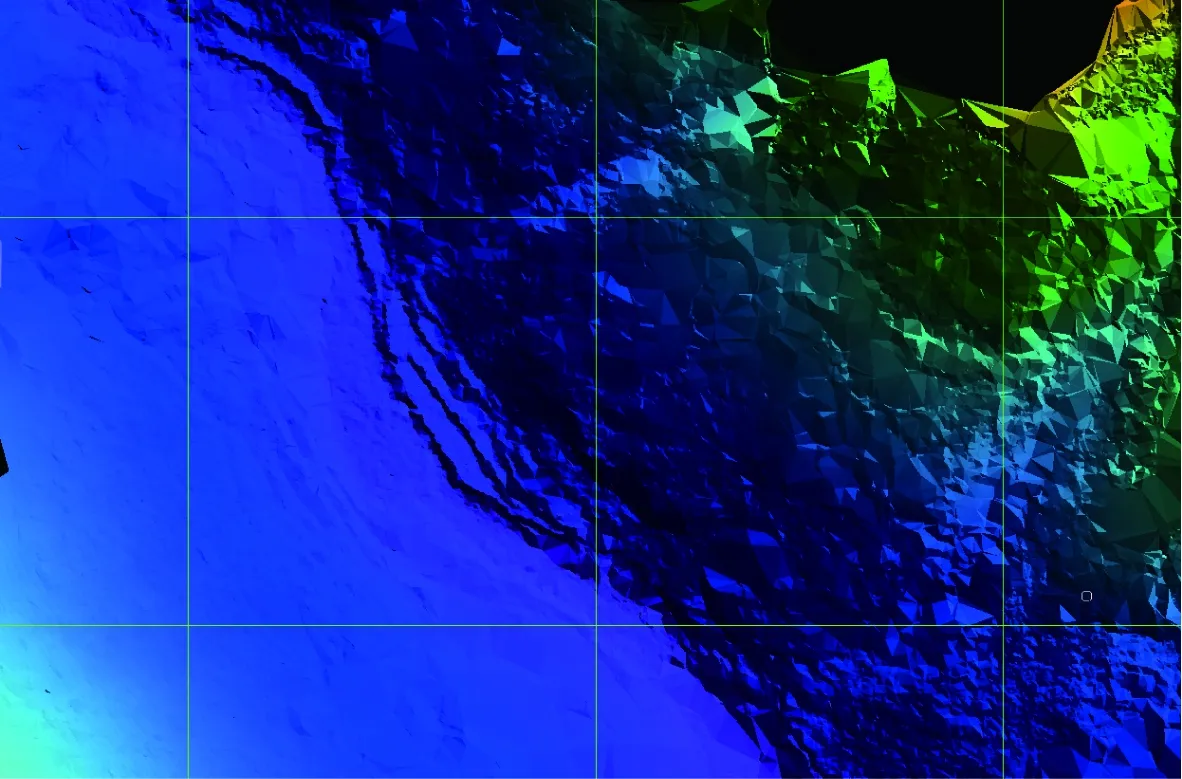
图3 滤波后得到的局部DEM数据
1.5 地面三维激光扫描数据漏洞的填补
采用无人机的DEM对地面三维激光扫描数据盲区补充时,可以采用以下方法进行改进。将地面三维激光扫描数据作为控制点,然后在无人机制作得到的DEM上进行内插,通过计算内插的高程和地面三维激光扫描仪的高程差,得到一系列坐标点的高程差值,然后利用这个高程差值对地面三维激光扫描出现漏洞的区域的无人机DEM进行高程值的改正。
2 无人机获取DOM技术
本次实验采用YC-GY04型固定翼无人机,相机为Canon 5D MarkII。无人机航摄的主要步骤如下。
2.1 相控点布设与测量
本次实验像控点为航飞前布设好的石灰标志点和油漆点,呈十字型,规格为0.4 m×1.0 m。像控点结合测区的地形进行布设,并采用四川省卫星定位连续运行基准服务平台(SCGNSS)进行联测,高程采用全省厘米级高精度似大地精化水准面(2.5′×2.5′)进行拟合。
2.2 航线的设计
在对无人机进行航线设计时,一般要求航向重叠度不能小于53%,旁向重叠度不能小于15%,一个航带内的最大航高与最小航高之差不能大于30 m。
2.3 内业数据处理
无人机的内业处理主要包括影像预处理、匹配、空三加密、正射纠正等。图4为采用无人机技术得到DOM数据。
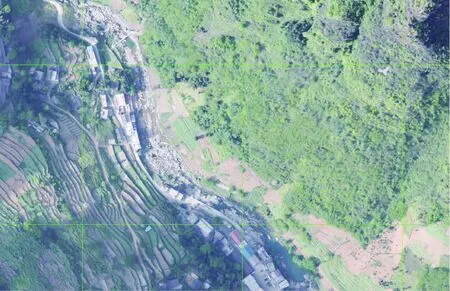
图4 处理后得到局部DOM数据
3 实验结果及精度验证
本次实验地点为四川省某地,该地地形复杂,垂直高差较大。通过对测区RTK实测的点云,在构建的DEM上进行内插得到内插的高程Z,最后和实测的高程进行对比,统计得到的DEM高程中误差为0.21 m,精度统计如表1所示。
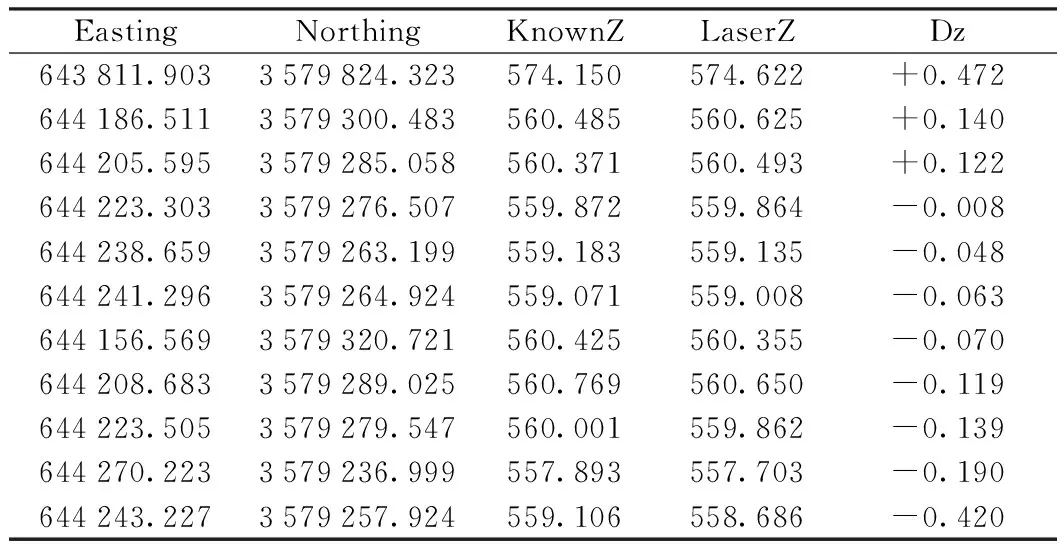
表1 DEM高程精度统计 m
本次DOM平面精度的检查采用外业检查的方法,即量测测区内明显地物点。本次实验采用房屋屋檐与正射影像对应的地物点坐标进行对比,误差控制在一个像素之内,而DOM影像分辨率大小为0.15 m。
4 结束语
地面三维激光扫描技术在获取局部高精度地形方面,具有效率高,成本低等特点,但是在获取DOM数据方面,局限性非常大。而无人机航摄技术在获取DOM上优势明显,但其DEM精度不高。结合这两种技术的各自优势,实现局部地形高精度DEM和DOM数据采集的需求。通过对四川某山区的实地的测量实验,采用该方法能够很好的获取高精度DEM和DOM数据,特别是对高差较大的山区,更具有推广应用价值。
[1] 张丽丽,王小平,张 瑛.基于无人机影像生产高精DEM的实践[J].测绘技术装备,2009,11(1):33-34
[2] 付红云,王晏民,胡春梅.一种新的基于地面激光雷达数据正射影像图制作方法[J].北京建筑工程学院学报,2011,27(4):16-21
[3] 张宏,胡明.三维激光扫描仪在地形测量中的应用[J].企业技术开发,2007,26(8):16-19
[4] 王峰,陈焕然,程效军.基于地面激光扫描仪的建筑数字化方法[J].地理空间信息,2011,9(3):39-42
[5] 吴磊,金伟娜,燕樟林.无人机摄影测量在公路选线上的应用研究[J].大坝与安全,2012(2):35-42
[6] 施贵刚.地面三维激光扫描数据处理技术及作业方法的研究[D].上海:同济大学,2009
[7] 金为铣,杨先宏,邵鸿潮,等.摄影测量学[M].武汉:武汉大学出版社,1996
[8] 晏磊,吕书强,等.无人机航空遥感系统关键技术研究[J].武汉大学学报(工学版),2004,37(6):67-70
[9] 史占军,于志忠,郭志强.无人机摄影测量在1∶2 000地形图的应用[J].吉林地质,2011,30(3) 133-136
[10] 金为铣,杨先宏,邵鸿潮,等.摄影测量学[M].武汉:武汉测绘科技大学出版社,2001
[11] 邱晓红,景华.无人机系统技术发展趋势[J].航空科学技术,2000(1):28-30
