振动噪声源主要传递路径方法研究
2013-05-11于洪涛王双记李海
于洪涛 王双记 李海
中国人民解放军91388部队96分队, 广东 湛江 524022
引言
水声隐身性是水下航行器最主要的性能之一。水下航行器是一个复杂的噪声源分布体,产生水下噪声的原因主要有三个方面:1)机械设备和管系通过基座与非支撑件激励艇体振动并向水中辐射噪声,还包括舱室空气噪声向水中透射引起的噪声以及冷却水管中的流体脉动向水中的声辐射;2)螺旋桨旋转运动产生的噪声,包括旋转噪声、湍流噪声、尾涡噪声和空化噪声,以及螺旋桨脉动压力通过轴系激励或直接激励艇体产生的噪声;3)水流流经艇体表面以及突体、附体、空腔所产生的水动力噪声和湍流脉动压力激励艇体产生的噪声。而机械设备产生的噪声是水下航行器低速巡航时最主要的噪声源,有效控制和减小其机械噪声是实现其安静化的首要环节。
由于机械设备产生水下噪声的途径是多种多样的,故此主要从声源和声传播两方面来考虑:选用低噪声设备;隔绝或减小振动、噪声和激励力的传递途径。低噪声设备的选择问题较为易解决,而传递路径的识别问题一直是难点问题,基于此原因本文提出一种基于信息相似性的声源传递路径识别研究。
1 理论分析
1.1 振动传递路径的物理模型
依据振动至声的传递过程,可将机械设备—传递路径—水声场的传递路线描述为图1所示的物理模型。按照这种传递模式,对各个传递环节的振动信息进行信息相似性分析或频谱能量的变化,查找信息相似性程度高或振动能量衰减小的环节,这些环节即为设备振动至声辐射的主要传递路径。

图1 振动传递路径物理模型
1.2 振动传递路径的数学模型

图2 多输入单输出系统
考虑q个被明确定义的、可测量的输入xi(t),i=1,2,…,q,它们通过q个频率响应函数为Hi(f),q的常参数线性系统产生一个测量输出 y(t)。输出y(t)是人们预计的理想线性输出vi(t),i=1,2,…,q与偏离理想模型的所有可能偏差之和(这些偏差包含在未知的n(t)中),见图2所示。在最小二乘意义下,Hi(f)的最优选择可使n(t)与vi(t)不相干(或不相关)。这是一种实际的物理情况,在此情况下可根据xi(t)及y(t)的测量来估计Hi(f)和n(t)。
输入和输出的一阶矩关系(这里以频域的随机谱表示)为:
对输入作变换,使得变换后的输入相互独立,而且变换特点是对每个输入逐步扣去与其相关的前面输入的剩余作为变换后的输入。
2 仿真研究
2.1 独立条件下的噪声源传递路径仿真研究
仿真条件:假设源信号分别为50Hz和100Hz正弦信号,其中50Hz 信号存在三条传递路径,分别为hi(t)、h2(t)和h3(t),100Hz 存在一条传递路径x4(t),x1(t)、x2(t)、x3(t)和x4(t)为测量输入,y(t)为测量输出,n1(t)、n2(t)、n3(t)、n4(t)分别为测量输入干扰噪声,n(t)为测量输出外界噪声。

图3 多输入/输出模型
Fir滤波器的优点在于保证满足滤波器幅频相应的同时又能得到严格的线性相位特性,故此,滤波器选Fir数字滤波器。hi(t)、h2(t)、h3(t)和 h4(t)分别位低通 Fir滤波器衰减系数分别为10dB、6dB、0dB和0dB。下面针对50Hz特征信息进行主要传递路径分析,具体结果如下:
利用偏相干分析所给出的相对独立贡献,如图4所示,偏相干函数值分别为0.9153和0.9066,表明100Hz特征频谱主要通过筏架刚性支撑点附近壳体向水声场传递。

图4 测量输入与测量输出的偏相干函数
2.2 耦合条件下的噪声源传递路径仿真研究
仿真条件:假设源信号分别为50Hz、100Hz和80Hz正弦信号,其中50Hz和100Hz 信号存在三条传递路径,分别为hi(t)、h2(t)和h3(t),80Hz 存在一条传递路径 h4(t),x1(t)、x2(t)、x3(t)和 x4(t)为测量输入,y(t)为测量输出,n1(t)、n2(t)、n3(t)和n4(t)分别为测量输入干扰噪声,n(t)为测量输出外界噪声。

图5 多输入/输出模型
下面针对50Hz和100Hz特征信息,利用建立的噪声源主要传递路径识别信息处理方法识别其主要传递路径。
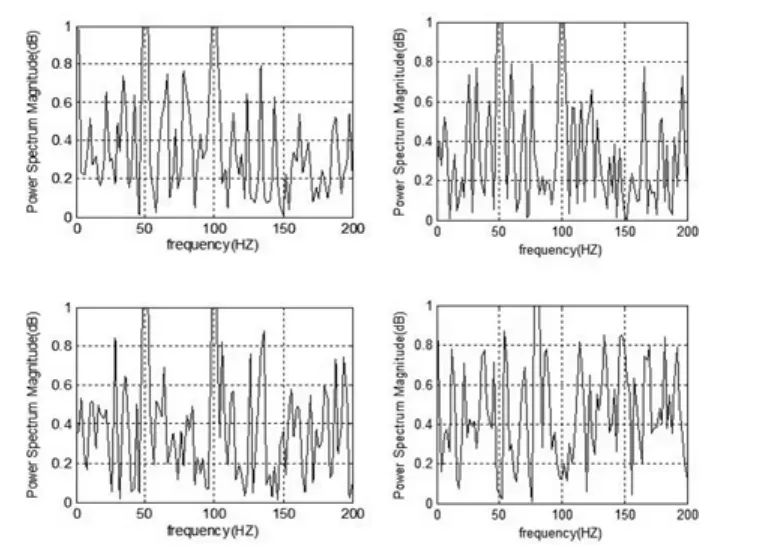
图6 输入与输出的相干函数
由图6可以看出,测量输入与测量输出存在50Hz和100Hz特征信息相似性的测量输入为x1(t)、x2(t)和x3(t);测量输入与测量输出存在80Hz特征信息相似性的测量输入为x4(t)。
下面针对50Hz和100Hz特征信息,利用建立的噪声源主要传递路径识别信息处理方法识别其主要传递路径。
①50Hz特征信息主要传递路径识别
由相干分析结果可以看出,选择与输出存在强相干性的输入x1(t)、x2(t)和x3(t)进一步采用偏相干方法,来分析50Hz特征频谱主要传递路径。
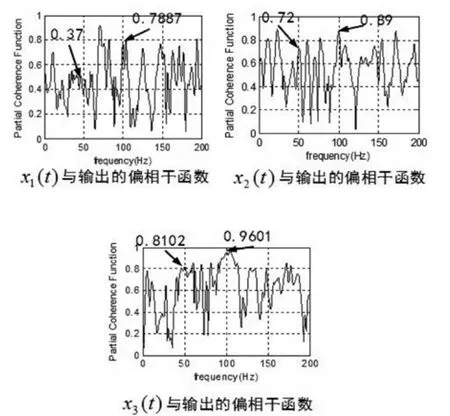
图7 测量输入与测量输出的偏相干函数
利用偏相干分析所给出的相对独立贡献,如图7所示,50Hz特征频谱的偏相干函数值分别为0.37、0.72和0.8102,表明50Hz特征频谱主要来源于x3(t),其次为 x2(t),x1(t)次之;100Hz特征频谱的偏相干函数值分别为0.7887、0.89和0.9601,表明100Hz特征频谱主要来源于x3(t),其次为x2(t),x1(t)次之。
综上所述,50Hz特征信息的主要传递路径为x4(t),其次为x2(t),x1(t)次之,分析结果与仿真设置条件一致。
3 小结
综上所述鉴于水下航行器的振动噪声源传递通道的复杂性,同时采用多种方法对振动噪声源主要传递路径进行辨识是必要的。虽然,现阶段研究而言,不同方法间的综合集成思路不是太明确的,基本上还停留在定性分析比较这一层面,但是,采用多种方法对振动噪声源主要传递路径进行识别是十分必要的,也将会是未来发展的一种趋势,本文提出的基于功率谱分析、相干分析及偏相干分析的分析方法从仿真分析结果来看效果非常好,具体工程应用有待进一步研究。
[1]王之程,程宗歧,于沨,刘文帅. 第1版. 舰船噪声测量与分析. 国防工业出版社,2004,1:1-5页
[2]J.S.贝达特,A.G.皮尔索. 凌福根译. 第1版.相关分析和谱分析的过程应用. 国防工业出版社,1983,5:187-208页
[3]杨德森. 利用偏相干方法识别主要激励源. 哈尔滨船舶工程学院学报,1994,15(3):35-44页
[4]刘培晨,戈升波. 利用偏相干函数识别振动源和噪声源. 山东纺织工学院学报,1994,9(4):58-64 页
[5]郑绪,郑文忠. 电测车车厢底板振源的偏相干分析. 农业工程学报,1995,11(2):81-85页
[6]马忠诚. 偏相干方法分析及其工程应用.应用声学,1994,(3):25-30页
[7]赵海澜,汪鸿振. 偏相干分析识别噪声源的计算. 噪声与振动控制, 2005(8):31-33页
