以单片机AT89C51为控制核心的智能电动车的硬件设计
2013-04-29方玮
方玮

【摘要】 以单片机AT89C51作为智能电动车的控制核心,利用H型PWM电路来控制电动机运转方向从而控制小车的行使轨迹;通过金属探测传感器探测金属,并发出声光报警;通过光电传感器来检测障碍物,有效避开障碍物。
【关键词】 单片机AT89C51 PWM光电检测传感器 金属探测传感器
一、设计方案
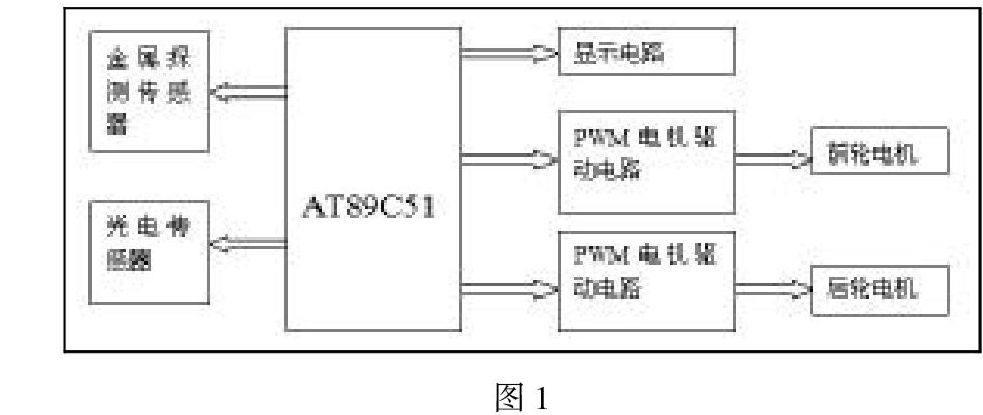
如图1所示,以单片机AT89C51为核心部分控制器件,利用金属探测传感器来对金属片的探测,利用光电传感器对障碍物的检测,用H型PWM电路来完成对电机的正反转,来控制小车的前进后退与方向的改变。
二、硬件电路的设计
1.电机驱动电路的设计
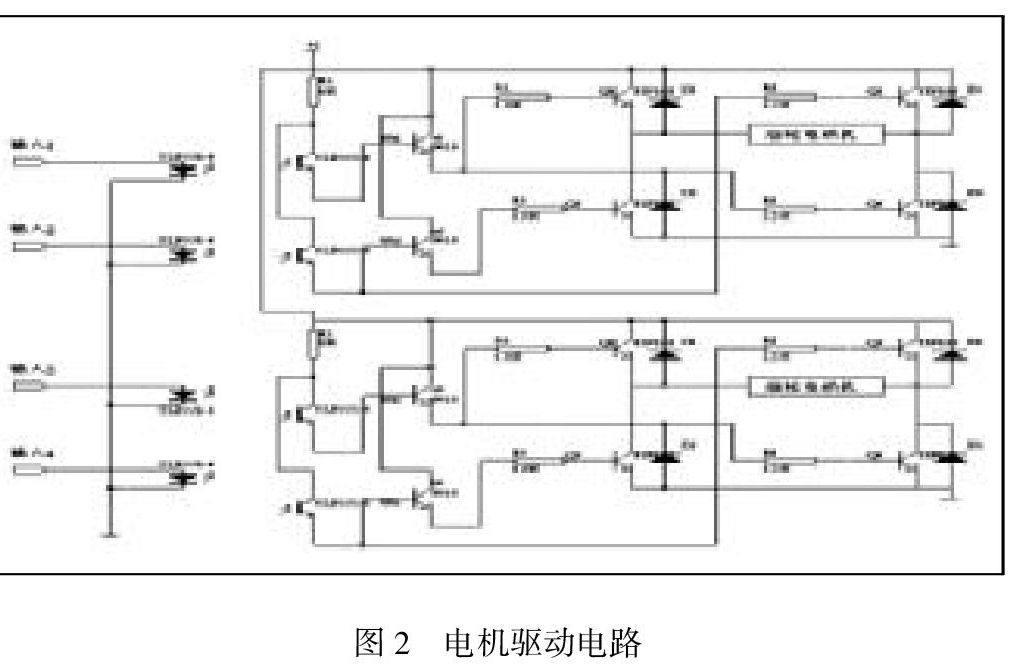
采用两个H型PWM驱动电路。当Ub1为高电平,Ub2为低电平时,Q1、Q4管导通,Q2、Q3管截止,电动机正转;当Ub1为低电平,Ub2高电平时,Q1、Q4管截止, Q2、Q3管导通,电动机反转。四个二极管可以在Ub1由高变低时,通过D2、D3两个二极管形成电动机电压回路。控制系统电源为6V,运用了TLP521-4光耦集成块,改善驱动电流。电路如图2所示。
2.矫正行使方向电路的设计
为使小车沿着引导线行使,在小车的底部安装了两个收发一体化的红外传感器。当小车发生向左发生偏转时,右边的红外线传感器就会接收到信号,向CPU申请中断,CPU将控制前轮电机实现向右转弯矫正;当小车发生向右发生偏转时,左边的红外线传感器就会接收到信号,向CPU申请中断,CPU将控制前轮电机实现向左转弯矫正。电路如图3所示。
3.单片机最小系统的设计。(1)AT89C51单片机最小系统采用AT89C51单片机与74LS373组成单片机的基本系统,对P2口的P2.5 P2.6和P2.7经74LS138地址译码器后作为INTEL8279的片选信号,P1口分别来控制前后电机的正反转和驱动报警电路以及传感器的收发电路。电路如图4所示。(2)显示电路的设计 。采用INTEL8279专用芯片,实现键盘输入和LED显示控制两种功能。电路如图5所示。
4.探测电路的设计的设计。(1)红外线传感器 采用两个收发一体化红外线传感器,对引导线的检测,使小车正确的按照引导线行使。(2)金属的探测 安装在小车的底部金属探测传感器探测到有金属的时候向CPU申请中断,使单片机对外发出声光报警的同时让数码进行显示所探测到金属的数据。(3)光电传感器 安装在小车的前部光电传感,当有障碍物时光电传感器输出底电平向CPU申请中断,CPU又通过P1口来控制电机的正反转。从而使小车避开障碍物。
5.报警电路的设计
利用音乐芯片和功放电路两部分来完成的。当CPU的P1.4口连续的输出高电平时,音乐芯片就开始输出乐曲信号,经功放电路开始报警。
三、结束语
该电路利用了PWM技术来解决了电机驱动,利用光电耦TLP521-4解决单片机与电机之间的隔离,使电机的驱动电流得到了有效改善;充分利用了AT89C51的强大功能,实现了对金属可靠的探测、智能化的路线检测等功能。
参 考 文 献
[1] 《数字电子技术》:江晓安编,西安电子科技大学出版社出版
[2] 《模拟电子技术》:江晓安编,西安电子科技大学出版社出版
[3] 《高性能模/数与数/模转换器件》:刘书明 刘斌编著,西安电子科技大学出版社出版
[4] 《单片机原理及应用》:张伟主编,机械工业出版社出版
[5] 《单片机中级教程》:何立明主编,北京航空航天大学出版社出版
