实时激光三维成像焦平面阵列研究进展
2013-04-27王飞
王 飞
(中国科学院长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林长春130033)
实时激光三维成像焦平面阵列研究进展
王 飞
(中国科学院长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林长春130033)
研究了应用于实时激光三维成像的焦平面阵列技术,介绍了目前国际上几种常用的焦平面阵列实现原理与技术特点,并对其优点与不足进行了分析,同时对表征焦平面阵列的主要性能指标以及其对最终成像系统的影响进行了定性分析。根据对现有技术的对比分析,提出基于雪崩光电二极管(APD)阵列和读出电路(ROIC)集成的探测器方案在灵敏度和作用距离等方面具有一定优势,是实现实时三维成像焦平面阵列较为理想的技术。作者认为在未来十几年内,激光三维成像焦平面阵列规模有望超过1 024 pixel×1 024 pixel,像元尺寸可降低到15μm。
激光三维成像;闪光式三维成像;焦平面阵列;脉冲飞行时间测距
1 引 言
激光三维成像技术可以通过扫描方式实现,但成像速度将大大降低,运动目标的探测效率不佳。实时三维成像技术采用集成的焦平面阵列探测器(Focal Plane Array,FPA),其三维成像速度极快,通过极短的采样时间或者单脉冲照明,即可获得目标区域三维成像,对于高速运动目标探测具有重要价值。近年来,应用于激光三维成像的FPA获得了极大的关注和大量科研经费的支持,发展迅速。FPA可视为二维光电传感器,其中每个像素均可以独立进行时间测量,从而可利用相干方法或者脉冲飞行时间测量(Time of Flight,TOF)技术获取目标的距离信息。
实时激光三维成像技术可以直接获取姿态等二维成像难以获取的信息,在军事和民用等诸多领域具有广泛的潜在应用[1-5],但对探测器器件具有极高的要求,需要高性能的阵列成像器件、较小的像元尺寸、极高的探测灵敏度、低噪声、高速读出电路等来获得较高的空间分辨率和时间分辨率;同时需要对半导体材料特性、集成工艺、器件结构等进行深入的研究。与国外相关单位相比,我国在阵列探测器件集成方面还具有较大的差距,由于此类器件在军事方面有较深的应用背景,多数高性能器件对我国处于禁运状态,极大地限制了实时激光三维成像技术的应用。目前,国内已逐渐开展实时激光三维成像技术相关研究,但受器件限制,进展相对缓慢。
本文介绍了现有实时三维成像用焦平面阵列的研究进展,重点分析了焦平面的阵列实现技术以及其主要性能指标对系统性能的影响。
2 三维成像焦平面阵列原理与结构
2.1 光混频器件(Photonic M ixing Devices,PMD)
光混频器件(PMD Technologies GmbH,Germany)可利用传统CMOS技术实现,其工作原理[6-7]如图1所示。
每个像素由两个相同的光敏单元a和b组成,如图1(a)所示。当在a和b间增加调制电压时,由于势阱效应,光电荷将向电压较低的电势一方积累。当照明光强与时间无关时,由光照产生的光电流或者光电荷相同,电荷均匀地向a和b积累,如图1(b)所示。若光强与时间有关,则将仅向特定的一个方向积累,如图1(c)所示。

图1 光混频原理Fig.1 Principle diagram of PMD
对发射激光和探测器的势阱电压进行调制,设为余弦调制,调制频率为f,则探测器a的输出电压可表示为:

式中:A为均值,K为对比度,φ0为相位偏置,φd为由脉冲飞行时间引起的延迟。由于在通道间加有推拉电压,探测器b的输出相对于a具有π的相移,即:

通过对输出信号进行多次测量(如在一个周期内每隔π/2测量一次),可以获得相位延迟φd=2πftd,由此即可获得激光信号的飞行时间。由于混频发生在CMOS芯片中,因此,可以采用标准CMOS技术,在单一芯片上同时集成探测器和读出电路(Read-Out Integrated Circuit,ROIC)。
目前有部分商用近距离(<10 m)、紧凑型的FPA(PMD Technologies GmbH,Swiss Center for Microelectronics-CSEM等)。根据积分时间和距离的不同,对于可明确分辨的目标,此类器件的精度为5~10 mm。当探测器像素视场内具有多个不可分辨的目标时,精确度将急剧下降。目前,此类器件的照明光源多为红外发光二极管(LED),受照明功率限制,该器件易受杂散光影响而达到饱和,作用距离通常小于10 m。由于其具有体积小、集成度高、成本低等优势,多应用于个人消费产品,图2即为CSEM所研制的三维成像相机。
图2 CSEM成像设备Fig.2 CSEM imaging device
2.2 像管(Imaging Tube)方案
全CMOS方案的探测器与ROIC均在同一芯片上,因此该技术难度较高。尤其是当所采用的激光波长不同时,如在人眼安全波段设计激光雷达时该技术就很难实现。基于安全性考虑,目前常用的激光雷达系统的激光发射功率受到极大的限制。当激光雷达由扫描成像走向阵列成像时,由于回波光子数将分布到n×n阵列上,此限制更为苛刻。采用人眼安全的激光光源,可以使用更大的激光功率获得更远的作用距离。对于此问题有两种解决方案,一种是更换探测器材料,图3是常见的3种材料的光谱响应曲线。可见InGaAs材料在人眼安全波段的响应最佳,此外HgCdTe,CdZnTe等材料也有类似的响应。因此,可以用这些材料作为探测器的光敏材料,但此类材料成本高,且难以像Si材料一样采用CMOS技术制造,像素密度有限。另一种方案是采用像管技术(Advanced Scientific Concepts Inc.),如图4所示[8]。

图3 不同材料的响应特性Fig.3 Optical response curves of Si,InGaAs and Ge
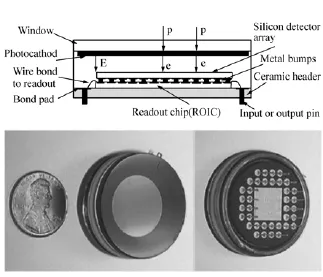
图4 像管结构与实物Fig.4 Imaging cube stucture and the sensor
像管技术在微光夜视及红外设备方面已经有相关应用。入射光子到达像管前部的光电阴极上,在阴极背面激发出光电子。光电子在内部电场的作用下加速,到达探测器阵列后进一步产生碰撞电离。撞击能量越高,FPA对应像素的输出电流越大。此种结构允许使用目前成熟的硅探测器阵列技术,其距离测量采用数字计时方式,易于实现。
基于此类FPA的激光雷达系统需要具有较强的数据处理能力。例如对于75 mm的测距精度,要求采样速度达到2 GHz。对应100 m的距离范围,30 Hz的成像速度,每像素的数据量可达到80 kB/s。通过自动阈值处理技术,可以降低部分数据率。典型成像实验结果如图5所示。

图5 128×128阵列成像效果Fig.5 Sample image of 128×128 array
2.3 Geiger模式雪崩光电二极管(GM-APD)阵列
APD利用了光电探测器雪崩效应,通过在pn结上加反向偏压,由探测器产生的光电子在此偏压电场的作用下被加速,与材料晶格产生碰撞电离,以进一步产生新的电子空穴对,引发雪崩效应。典型雪崩二级管的增益与偏压的关系如图6所示[9]。
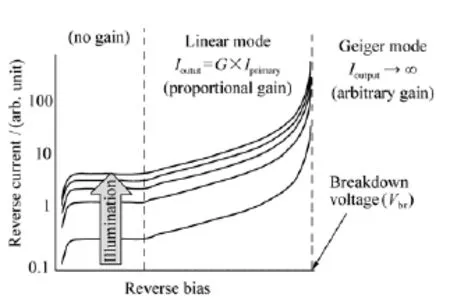
图6 APD反向电流与反向偏压的关系Fig.6 I-V characteristic of APD detector
通常APD多工作于线性区域,此时的反向偏压小于雪崩电压,输出电流与入射光强成正比例关系。当探测器偏压高于雪崩电压时,输出电流将迅速趋于饱和,产生一个较强的输出电流。工作于此区域的探测器称为Geiger模式APD。
麻省理工学院(MIT)的Lincoln实验室采用Geiger模式的APD代替像管,通过块接(Bumpbonding)或者桥接(Bridge-bonding)技术与CMOS时间数字转换(Time-to-digital Convertor,TDC)ROIC集成,其时间测量方式如图7所示[9]。
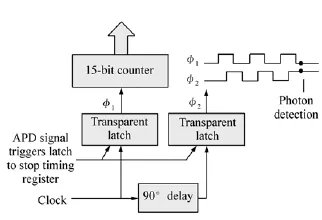
图7 APD时间测量电路原理Fig.7 Timing circuit for single pixel
当激光器发出激光脉冲时,计数器开始计时,当探测器探测到光子时,由于雪崩作用,其输出将迅速达到饱和,触发计时电路的锁存器,从而使计数器停止计数,根据所采用的时钟频率和计数值,可以获得探测器飞行时间,此种技术即为脉冲飞行时间测距技术(Time-of-flight Ranging)。采用阵列探测器时,单次激光脉冲照明即可获得整个目标区域的三维距离像,因此又称为闪光式三维成像(Flash three dimensional imaging)。
通常Geiger模式探测器需要外加淬火电路。常用的方法分被动淬火和主动淬火两种,被动淬火简单易行,但相对所需时间较长,由此引起的探测器死时间(两次探测间的时间间隔)较长。主动淬火电路相对复杂,但优点是可以获得较好的时间响应。采用高速的计时技术,时间测量分辨率可在100 ps左右,具有极高的测距精度。
采用此类探测器的主要优点是灵敏度高、响应速度快、易于集成。此类探测器可以达到单光子级的灵敏度,当探测器接收到光子时,其输出电流可以在数十皮秒内迅速增加,响应速度快,可以获得较高的时间精度。同时其输出电流大小与入射光强度无关,且可以驱动CMOS数字电路,因此无需对输出电流信号进行放大和模拟采样等处理。数据读出结构可以实现全数字化处理,可以大大降低片上数据处理的复杂度,从而减小芯片面积的占用,易于制造更大规模的探测器阵列。自MIT开展Geiger模式的APD阵列研究后,单光子阵列探测器(SPAD)阵列迅速发展,其探测器阵列由最初的4 pixel×4 pixel,迅速提高为32 pixel×32 pixel,256 pixel×64 pixel[10-11]等。目前正积极开展256 pixel×256 pixel规模的探测器阵列研究,未来可能将探测器规模进一步推进到1 024 pixel×1 024 pixel规模[12],15μm pixel大小。随着采用的探测器材料不同,响应波段从可见、近红外到中红外。瑞士的Niclass等[13]研制成功了集成10位计时器阵列的128 pixel× 128 pixel的Geiger模式探测器阵列,探测器光子探测效率在460 nm时最高可达35%,其像素间距最小达到25μm。
Geiger探测器存在的主要问题产生于自身的高灵敏度,因此对噪声更敏感,探测器间的串扰问题也更为严重。为降低探测器串扰,探测器光敏面通常会小于探测器间距,因此探测器的填充因子较低。这一问题可通过光斑阵列照明技术或者微透镜阵列技术解决,特别是采用阵列照明技术时,探测器的有效视场较小,通过合理的光斑点阵设计有望获得更高的探测信噪比。
另一个主要问题是由于Geiger探测器无法区分入射光强大小,单个光子与多个光子的输出结果是一样的。随着研究的深入,人们已经开始研究线性模式的APD阵列探测器件,此类器件在具有单光子探测能力的同时,也可以获取回波信号的强度,还可以通过设定阈值等手段进一步提高噪声的鉴别能力。不过,相应的探测器集成难度也会大大提高。
2.4 线性模式雪崩光电二极管(LM-APD)阵列
为解决Geiger模式APD存在的多种问题[14],科研人员开始研制线性模式APD阵列。线性模式的APD阵列在达到单光子探测能力的同时,通过ROIC也可以获得回波信号的强度信息,相比Geiger模式探测器具有以下优势:(1)具有多目标探测能力;(2)采用阈值方式,可获得较低的虚警概率;(3)对遮蔽目标有更好探测能力;(4)可获取回波信号强度。
Advanced Scientific Concepts公司目前已经开始出售工作波段为1.57μm的三维成像相机,采用128 pixel×128 pixel InGaAs探测器,帧频为1~20 Hz。此商用产品的灵敏度略低,作用距离<1 km,定制的DragonEye已经搭载到航天飞机[15]上开始交会对接技术实验,未来有望应用于全自动的空间交会对接以及自动避障等。
法国的CEA Leti研制了320 pixel×240 pixel基于HgCdTe的雪崩光电二极管阵列,工作温度为80 K,像元尺寸为30μm,可以同时实现2D和3D成像。实验结果表明,在30 m的景深条件下可获得15 cm的测距分辨率[16-17]。
线性模式的APD增益通常较低,但随着近年来对线性模式APD研究的深入,光子计数级灵敏度线性模式APD探测器[18-20]的出现,已使Geiger模式探测器的灵敏度优势逐渐降低。
线性模式APD比Geiger模式探测器信号处理更为复杂,需要对输入信号进行放大、滤波、高速采样、阈值比较、存储等多种操作,对ROIC设计有较高的要求,其像素工作原理如图8所示。
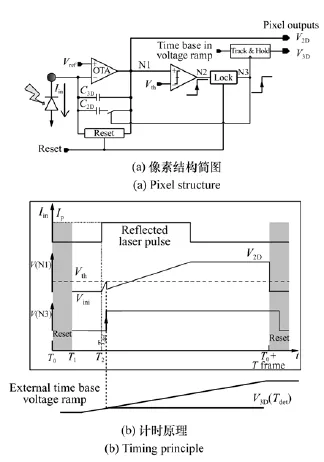
图8 像素结构与计时原理图Fig.8 Principle diagram of pixel structure and timing
线性APD信号处理包括强度测量和时间测量,如图8(a)所示。其强度测量采用与CCD类似的积分形式实现,其时间测量采用对基准参考电压采样实现原理如图8(b)所示。脉冲发射(T1)后,参考电压开始随时间线性增加,当激光脉冲回波到达(T2)后,触发锁存器,对参考电压采样即V3D,根据电压的大小,即可判定脉冲回波时间,获取目标距离。
由于电路处理结构的复杂化,占据的芯片面积增加,使像素的间距提高。为降低像素间距,提高分辨率,人们提出了Z堆叠(Z-stacking)技术。在此类技术中,ROIC芯片不再平行于探测器表面,而是垂直于探测器表面,以薄片的形式相互粘合在一起。由于ROIC不再占用探测器面积,因此有望制造更大规模、更小像元尺寸的探测器阵列。对于此类技术来说,功率耗散和芯片长度的限制是主要问题。现有技术条件下,通常认为512 pixel×512 pixel的阵列较为可行。
由于Z堆叠仍存在芯片长度限制,因此,研究人员提出另一项垂直互连探测器阵列(Vertically Integrated Sensor Arrays,VISA)技术[21],两种技术的结构形式类似,如图9所示。VISA采用垂直互连代替Z堆叠中的平行结构,因此,可以克服芯片长度限制,可用于制造更大规模的探测器阵列和更复杂的片上信号处理系统。

图9 VISA与Z堆叠技术结构比较Fig.9 Comparison of VISA and Z-stacking
VISA结构的探测器基本结构如图10所示。目前采用VISA技术已经成功实现256 pixel× 256 pixel规模的探测器阵列,主要研究单位有DRS Infrared Technology,Rockwell Scientific,Raytheon Vision System等。采用Z堆叠技术或VISA技术,可以极大地提高焦平面阵列的像元集成度、信号处理复杂度、降低片外信号处理时的带宽需求,可以获得更高的动态范围、更高的饱和阈值、更高的工作温度、更高的距离分辨率及更小的像元尺寸,这是目前焦平面阵列的热点研究内容。
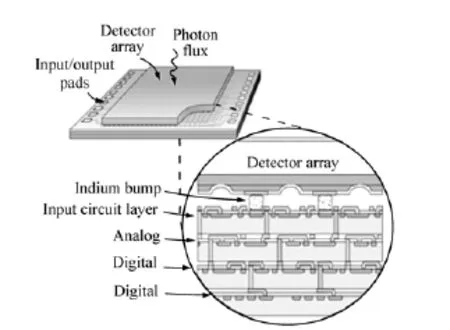
图10 采用VISA技术的焦平面阵列结构Fig.10 Structure of FPA based on VISA technology
3 焦平面阵列器件性能比较
针对不同的应用对焦平面阵列器件的选择可能有不同的需求,其主要性能指标可包括物理特性和光电特性。
3.1 物理特性
物理特性包括探测器阵列的规模、像元尺寸、像元间距等特性。探测器的阵列规模决定了单次探测的成像采样数据,规模越大单次测量获得的信息量越大,但同时对于激光发射功率的需求也越高。
像元尺寸和像元间距直接关系到探测器的填充因子,填充因子越高,探测到的能量越大。像元间距与光学系统共同作用决定三维成像系统的角分辨率。像元间距越小,同样光学系统条件下可获得的分辨率越高。对于衍射受限系统,角分辨率可表示为:

式中:Δ表示角分辨率,d为像元间距,f为接收系统焦距。
3.2 光电特性
光电特性[22-23]主要包括探测器的光谱响应范围、响应度或者量子效率、暗电流(对Geiger模式为暗计数率)、串扰、电路计时精度、电路计时范围(测量距离范围)、死时间长度等。
光谱响应范围主要取决于探测器的材料和制作工艺,与发射激光的频率相一致。通常情况下量子效率越高、响应度越好探测器越理想。响应度通常用A/W表示,即单位功率产生的光电流大小。量子效率通常用百分比表示,即探测器产生光电子与入射光子的比值。
暗电流是指在没有入射光的条件下由于探测器自身的热噪声等原因而产生的输出光电流,它决定了探测器所能探测的最小光功率,间接影响系统最终的探测信噪比。通常利用制冷等技术可以有效地降低暗电流。
串扰指由于某一像素的光电流引起的周围像素光电流的变化。由于串扰将影响探测器的空间分辨能力,因此希望串扰越小越好。串扰产生的原因包括光学和电子学。
电路计时精度指集成的ROIC的最小时间测量精度,决定了系统的测距精度和距离分辨能力,高精度的计时分辨率在100 ps左右,对应的测距分辨率在1.5 cm左右。
电路计时范围指ROIC所能测量的最大时间长度,对应系统测量的距离范围,计时范围越长,需要的计时电路越复杂,测量距离范围也越大。实际应用需要根据相应的系统要求和测距精度要求进行合理的选择,以降低系统整体技术难度和成本。
死时间长度指探测器在经过雪崩过程后,恢复到可以再次进行探测所需的时间长度。此参数对于Geiger探测器的影响更大,特别是在单像素视场内存在多个目标时,死时间决定了系统所能分辨的物体间最小距离范围[24]。对于被动式淬火,死时间多在100 ns甚至更长,主动式淬火可以将此时间降低在10 ns以内,多目标探测能力有质的提升。
3.3 用3D相机性能比较
表1为几种以不同模式探测器为基础的三维焦平面相机的主要性能参数,由于未找到相应的商用像管类产品,因此未做比较。
由表中数据可见,PMD器件在分辨率、阵列规模等方面领先,对于作用距离要求较低的消费级应用较为适宜。Geiger模式探测器在探测器灵敏度方面优势较为明显,可以利用较低的激光发射功率实现较远的作用距离。线性APD目前的研究也逐渐升温,发展潜力巨大。对于科学研究与工业应用来说,基于APD阵列探测器的焦平面阵列将是未来激光三维成像技术的主要发展方向。
4 结束语
实时三维成像技术是未来激光主动成像技术的主要发展方向。从探测器灵敏度及系统最终作用距离方面考虑,基于APD阵列与ROIC集成的探测器方案是目前实现实时三维成像焦平面阵列较为理想的技术,在灵敏度、作用距离等方面具有一定的优势。目前,三维成像焦平面相关技术的发展受器件生产能力的限制极为明显,希望国内研究人员能够借鉴国外先进经验,逐步减小与国外同类产品的技术水平差距,更好地服务于国防与民用事业。
[1]郭裕兰,万建伟,鲁敏,等.激光雷达目标三维姿态估计[J].光学精密工程,2012,20(4):843-850.GUO Y L,WAN JW,LU M,et al..Three Dimensional orientation estimation for ladar target[J].Opt.Precision Eng.,2012,20(4):843-850.(in Chinese)
[2]张健,张雷,曾飞,等.机载激光3D探测成像系统的发展现状[J].中国光学,2011,4(3):213-232 ZHANG J,ZHANG L,ZENG F,et al..Development status of airborne 3D imaging lidar systems[J].Chinese Optics,2011,4(3):213-232.(in Chinese)
[3]乔培玉,何昕,魏仲慧,等.高斯滤波器在子弹三维图像特征提取中的应用[J].液晶与显示,2012,(5):708-712. QIAO PY,HE X,WEIZH H.Application of gaussian filter in extracting bullet feature of3-D bullet image[J].Chinese J.Liquid Crystals and Displays,2012,(5):708-712.(in Chinese)
[4]周娜,安志勇,谭清中.基于激光雷达的形面扫描技术研究[J].光学与光电技术,2011,9(5):58-60. ZHOU N,AN ZH Y,TAN Q ZH.Research on profilemeasurement technology based on the laser radar[J].Opt.Optoelectronic Technology,2011,9(5):58-60.(in Chinese)
[5]邢建芳,龚华军,张赵行,等.三维数据场在扫描式体显示器中的可视化[J].液晶与显示,2012,(4):529-534. XING JF,GONG H J,ZHANG ZH X,et al..Visualization of3D datasets based on swept-volume display[J].Chinese J. Liquid Crystals and Displays,2012,(4):529-534.(in Chinese)
[6]LUAN X M.Experimental investigation of photonic mixer device and development of TOF 3D ranging systems based on PMD technology[D].Siegen:University of Siegen,2001.
[7]RINGBECK T,HAGEBEUKER B.A 3D time of flight camera for object detection[EB/OL].(2007-07-12)[2013-02-22].http://www.ifm.com/obj101D-Paper-PMS.pdf.
[8]STONEW C,JUBERTSM,DAGALAKISN,et al..Performance analysis of next-generation LADAR for manufacturing,construction,and mobility[EB/OL].(2004-05-06)[2013-02-11].http://fire.nist.gov/bfrlpubs/buildO4/artO32.html.
[9]AULL B F,LOOMISA H,YOUNG D J,et al..Geiger-mode avalanche photodiodes for three-dimensional imaging[J]. Lincoln Laboratory J.,2002,13(2):335-350.
[10]DRIES JC,MARTIN T,HUANGW,etal..InGaAs/InP avalanche photodiodes arrays for eye safe three-dimensional imaging[J].SPIE,2003,5074:11-17.
[11]YOUNGER R D,MCINTOSH K A,CHLUDZINSKI JW,et al..Crosstalk analysis of integrated geiger-mode avalanche photodiode focal plane arrays[EB/OL].(2009-04-01)[2013-02-11].http://dspace.mit.edu/handle/1721.1/52684.
[12]FIGER D F,LEE J,HANOLD B J,et al..A photon-counting detector for exoplanet missions[J].SPIE,2011,8151:81510K
[13]NICLASSC,FAVIC,KLUTER T,et al..A 128 128 single-photon image sensor with column-level 10-bit time-to-digital converter array[J].IEEE J.Solid-State Circuits,2008,43(12):2977-2989.
[14]WILLIAMSGM.Limitations of geiger-mode arrays for flash LADAR applications[J].SPIE,2010,7684:768414.
[15〛 NASA Space Shuttle Mission STS-127[EB/OL].[2013-02-22].http://www.nasa.gov/pdf/358018main-sts127-presskit.pdf.
[16]de BORNIOLE,CASTELEIN P,GUELLECF,etal..A 320x256 HgCdTe avalanche photodiode focal plane array for passive and active 2D and 3D imaging[J].SPIE,2011,8012:801232.
[17]BORNIOL E,ROTHMAN J,GUELLEC F,et al..Active Three-dimensional and thermal imaging with a 30μm pitch 320 ×256 HgCdTe avalanche photodiode focal plane array[J].Opt.Eng.,2012,51(6):06305.
[18]YOUMANSD G.Linear-mode avalanche photo-diode detectorswith a quasi deterministic gain component:statisticalmodel studies[J].SPIE,2011,8037:803716
[19]JACK M,WEHNER J,EDWARDS J,et al..HgCdTe APD-based linear-mode photon counting components and LADAR receivers[J].SPIE,2011,8033:80330M.
[20]BECK JD,SCRITCHFIELD R,MITRA P,et al..Linearmode photon counting with the noiseless gain HgCdTe e-APD[J].SPIE,2011,8033:80330N.
[21]BALCERAK R,HORN S.Progress in the development of Vertically Integrated Sensor Arrays[J].SPIE,2005,5783:384-391.
[22]MCMANAMON P F.Review of ladar:A historic,yet emerging,sensor technology with rich phenomenology[J].Opt. Eng.,2012,51(6):060901.
[23]GATT P,JOHNSON S,NICHOLS T.Geiger-mode avalanche photodiode ladar receiver performance characteristics and detection statistics[J].Appl.Opt.,2009,48(17):3261-3276.
[24]GATTP,JOHNSON S,NICHOLST.Dead-time effects on Geiger-mode APD performance[J].SPIE,2007,6550:65500I
Research progress in focal plane array for real-time laser three dimensional imaging
WANG Fei
(State Key Laboratory of Laser Interaction with Matter,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
*Corresponding author,E-mail:felixw@163.com
In this article,we introduce severalmain Focal Plane Array(FPA)structures used nowadays and try to find their advantages and shortcomings.Severalmain parameters used to describe the performance of FPA and their influences on system performance are described.On the analysis and comparison for existing FPA technologies,it suggests that the integrated detecting scheme based on a Avalanche Photodiode(APD)and a Read-out Integrated Circuit(ROIC)will be an ideal real-time three dimensional imaging technology due to its advantages in sensitivity and operation ranges.It also indicates that in the near future,the scale of FPA can exceed 1 024 pixel×1 024 pixel with a pixel pitch of 15μm.
laser three dimensional imaging;flash three dimensional imaging;Focal Plane Array(FPA);pulse time-of-flight ranging
TN215;TN249
A
10.3788/CO.20130603.0297

1674-2915(2013)03-0297-09
2013-02-22;
2013-04-25
国家高技术研究发展计划(863计划)资助项目(No.2012AA7031024G)
王 飞(1981—),男,河北容城人,博士,助理研究员,2010年于哈尔滨工业大学获得博士学位,主要从事光电探测与激光三维成像技术的研究。E-mail:felixw@163.com