三线阵CCD相机安装支架分析及检测
2013-04-27张立平
张立平,王 智
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
三线阵CCD相机安装支架分析及检测
张立平,王 智*
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
为了满足三线阵CCD相机对刚度和稳定性的要求,提高相机测绘精度,本文在有限元优化分析的基础上完成了相机测绘基座的结构设计。对测绘基座的模态以及承受载荷情况下的自重变形以及自重变形引起的各相机光轴的变化量进行了分析。基于得到的测绘基座关键技术指标,研制了测绘基座专用的垂直度检测工具。对加工过程中测绘基座进行了跟踪检测,验证了该检测工具的可用性,确保测绘基座的几何精度。
立体测绘相机;测绘基座;有限元分析;垂直度检测
1 引 言
立体测绘相机是星载对地摄影测量最有效的方法和手段,它由具有独立镜头的3个线阵CCD相机组成,它们分别安装在相机支架相应的安装孔内,且相机之间保持一定的位置关系。
无地面控制点的测绘精度对立体测绘相机的力学稳定性、热稳定性提出了很高的要求[1-3]:
(1)前视、后视相机测量坐标系和正视相机测量坐标系之间转换矩阵的力学稳定性≤15″(绕Z轴,即相机光轴),≤10″(绕X,Y轴);
(2)前视、后视相机测量坐标系和正视相机测量坐标系之间转换矩阵的热稳定性≤3″(绕Z轴,即相机光轴),≤3″(绕X,Y轴)。
测绘基座是三线阵CCD相机的安装支架,是保证立体测绘相机力学稳定性、热稳定性的关键部件,它的力学特性决定了相机光轴的指向精度以及空间稳定性。测绘基座的设计、加工及检测是保证其满足要求的必要手段。为了满足立体测绘相机的力、热稳定性要求,本文采用有限元优化分析的方法对测绘基座的结构设计进行反复迭代,最终获得了满足要求的结构;对测绘基座的检测指标进行分析,设计了专用检测工具对测绘基座相机安装孔的垂直度进行检测,以检验其是否达到设计指标要求。
2 测绘基座结构设计及分析[4-10]
由于线阵CCD相机、测绘基座以及卫星安装平台均采用独立的热控设计,故本文不考虑测绘基座的热稳定性。对测绘基座各相机安装位置的受力情况进行了分析。立体测绘相机完成装配后,为了保证各相机的指向精度以及稳定性,测绘基座采用板-筒相结合的结构形式。考虑在热控措施下的热稳定性,测绘基座的材料选用铸钛合金(ZTC4),采用石墨铸造高压离心浇铸成型,设计模型如图1所示。

图1 测绘基座结构设计模型Fig.1 Structuralmodel ofmapping foundation-seat
测绘基座模态分析结果如表1和图2所示。由表1可以看出,各阶模态的频率间隔较大,说明测绘基座具有足够高的动态刚度,且其模态叠加的可能性较小。

表1 测绘基座的前4阶模态Tab.1 The first 4 modes ofmapping foundation-seat
在设计测绘基座时,除了考虑自身的刚度以及稳定性外,还要考虑3个线阵CCD相机装配在测绘基座上组成立体测绘相机的自重变形情况,要使测绘基座在立体测绘相机自重变形后的误差满足其力学及热稳定性的技术指标要求,需对立体测绘相机的自重变形进行分析。立体测绘相机自重变形分析结果如表2、表3和图3所示。

图2 测绘基座模态Fig.2 Modes ofmapping foundation-seat

表2 立体测绘相机的自重变形Tab.2 Gravity distortion of tridimensionalmapping camera
经过有限元分析与设计的反复迭代,最终得到满足测绘要求的测绘基座。
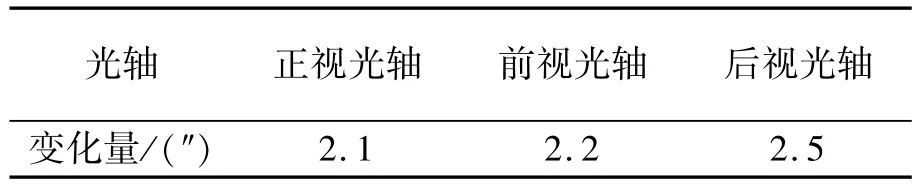
表3 自重变形引起光轴变化量Tab.3 Ray axis change caused by gravity distortion

图3 立体测绘相机的自重变形Fig.3 Gravity distortion of tridimensionalmapping camera
3 测绘基座检测
3.1 测绘基座垂直度技术指标分析
测绘基座的最大外形尺寸为710 mm(X向)×730 mm(Y向)×476 mm(Z向),为了保证立体测绘相机的力学及热稳定性,3个相机与测绘基座的联接结构采取长孔配合、法兰端面联接的方式,其中正、前、后视相机安装孔长为280 mm。测绘基座法兰安装面与相机安装孔中心轴线的垂直度和稳定性是测绘基座的关键技术指标。
由于测绘基座相机安装孔Z向尺寸超出了现有三坐标测量机的测量行程,无法用现有的三坐标测量机进行检测。为了能够对测绘基座相机安装孔的垂直度进行检测,需要结合测绘基座的具体结构,分析其垂直度技术指标,研究这种大尺寸工件的垂直度检测方法,并研制相关的检测工具。
为了满足测绘精度的要求,3个线阵CCD相机视轴平行性应小于等于±3″,故以这个指标约束测绘基座上的相机安装孔(如图4所示)。以正视相机安装孔为例,|β|≤1″,要求安装孔的圆柱度为0.003 mm,则2×280×tanβ=0.003 mm,所以法兰端面与安装孔中心轴线的垂直度为0.003 mm。
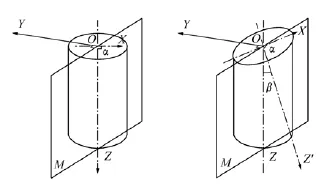
图4 法兰端面与安装孔中心轴线的关系Fig.4 Relationship between flange end and axis of camera fixing hole
3.2 测绘基座垂直度检测工具的研制
为了能同时对3个相机安装孔的垂直度指标进行检测,需要根据前面的分析研制一套专用的垂直度检测工具,以指导相机安装孔的加工,完成图纸提出的垂直度指标要求。

图5 测绘基座垂直度检测工具结构图Fig.5 Sketch of verticality detection tool for mapping foundation-seat
测绘基座垂直度检测工具结构设计如图5所示,主要由8个零件组成。检具使用时,检具上的3个基准支点靠在被检端面上,2个互成90°的定位支点靠在相机安装孔内壁,通过调节定位支点,使两个支点的外端点所成的圆弧半径与相机安装孔半径一致,加工时保证这两个定位支点在同一高度上,以确保检具旋转时两个定位支点所走过的轨迹与相机安装孔在同一个圆截面,从而使电感仪测头所走过的轨迹是相机安装孔的同一个截面,否则,检测结果毫无意义。其中关键的一点是电感仪测头与其中一个定位支点平行,这样由电感仪测头、与其平行的定位支点、检具的中心轴线构成的平面与检具上3个基准点构成的平面垂直,测绘基座垂直度检测工具就是利用这两个垂直的面来检测测绘基座的相机安装孔。同时,为了能检测孔上不同截面的垂直度,检具上的电感仪测头可以上下移动,当移动到需要测量的位置时,通过紧定螺钉固定测头,就可对工件进行检测。
3.3 测绘基座相机安装孔垂直度检测
在测绘基座的相机安装孔加工达到图纸要求的技术指标(圆柱度0.003 mm)后,以相机安装孔的内径为基准,对相机安装孔的法兰端面与安装孔中心轴线的垂直度进行检测。如图6所示,将检具的3个基准支点靠在测绘基座相机安装孔的法兰端面上,调整检具的2个定位支点及电感仪测头,使其与安装孔的内壁靠紧,并将电感仪的数显表清零。在相机安装孔加工过程中,考虑到刀是从法兰端面伸进相机安装孔进行加工的,由于刀杆悬臂颤动的影响,离刀具装夹最远处的垂直度最差,所以,将电感仪测头靠在这个位置检测的数据才可靠。为了得到可靠的检测数据,如图6所示,需要移动电感仪测头的位置,获取多个检测截面的数据。
表4所得到的数据是在如图6所示的某个检测截面上,3次均匀获取的8个采样点的数据。

图6 检测工具的使用Fig.6 Application of detection tool
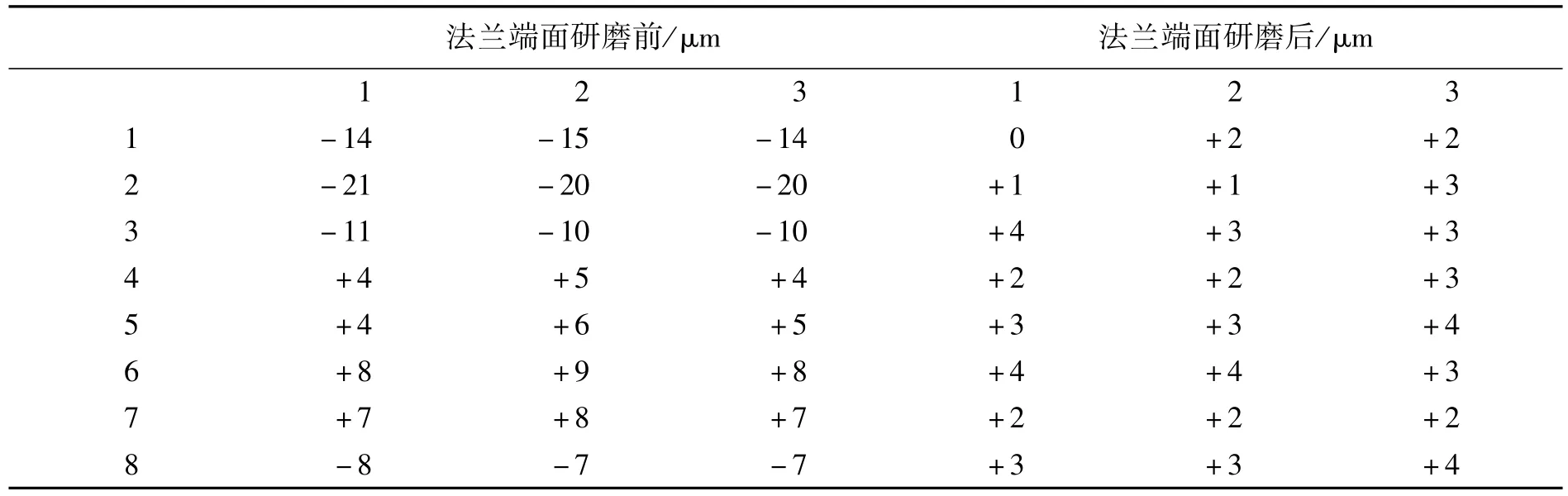
表4 垂直度过程检测数据Tab.4 Detection data of verticality
为了确认研制的垂直度检测工具检测数据的可靠性,借助于外协单位的大型三座标测量机对基于该检测数据加工的测绘基座进行了复检,结果显示误差在0.5μm内,满足了设计提出的精度要求,证明了所研制的垂直度检测工具的可靠性。
4 结 论
测绘基座是三线阵CCD相机的安装支架,其刚度、稳定性及精度关系到立体测绘相机的光轴指向精度及空间光轴稳定性,继而影响测绘精度,因此,在设计测绘基座时,需考虑基座的刚度及稳定性,同时还要考虑各相机安装在测绘基座以后的自重变形。本文在有限元优化分析的基础上,得到了满足要求的测绘基座的结构设计。为了保证测绘基座的质量,研制了测绘基座垂直度专用检测工具,通过在测绘基座加工过程的检测实践验证了该检测工具的可使用性,同时指导了测绘基座加工并保证其加工精度。
[1]胡莘,曹喜滨.三线阵立体测绘卫星的测绘精度分析[J].哈尔滨工业大学学报,2008,40(5):695-699. HU X,CAO X B.Analysis on Precision of stereomappingmicrosatellite using three-line array CCD images[J].J.Harbin Institute Technology,2008,40(5):695-699.(in Chinese)
[2]高卫军,孙立,王长杰,等.“资源三号”高分辨率立体测绘卫星三线阵相机设计与验证[J].航天返回与遥感,2012,33(3):25-34. GAOW J,SUN L,WANG CH J,et al..Design and verification of three-line array camera for ZY-3 high resolution stereo mapping satellite[J].Spacecraft Recovery and Remote Sensing,2012,33(3):25-34.(in Chinese)
[3]岳丽清,张继友,伏瑞敏,等.三线阵相机视轴夹角及线阵平行性装调测试[J].航天返回与遥感,2012,33(3):35-40. YUE L Q,ZHANG JY,FU R M,et al..Alignmentmethod of axis angle and linear array parallelism for three-line array mapping camera[J].Spacecraft Recovery and Remote Sensing,2012,33(3):55-40.(in Chinese)
[4]王智,乔克,张立平.三线阵立体测绘卫星LMCCD相机的实现[J].光机电信息,2010,27(11):110-114. WANG ZH,QIAO K,ZHANG L P.Implementation of LMCCD camera for stereomapping satellite using three-line array CCDs[J].OME Information,2010,27(11):110-114.(in Chinese)
[5]王智,张立平,姚惠.三线阵立体测绘相机光学镜头的设计[J].光子学报,2010,39(2):227-232. WANG ZH,ZHANG L P,YAOH.Design on optical lens of three-linear tridimensionalmapping camera[J].Acta Photonica Sinica,2010,39(2):227-232.(in Chinese)
[6]王智,张立平,李朝辉.传输型立体测绘相机的调焦机构设计[J].光学精密工程,2009,17(5):1051-1056. WANG ZH,ZHANG L P,LIZH H.Design on focusingmechanism of space tridimensionalmapping camera[J].Opt.Precision Eng.,2009,17(5):1051-1056.(in Chinese)
[7]王智,张立平,李朝辉.三线阵立体测绘相机构像及误差模型的建立[J].光电工程,2010,37(1):95-100. WANG ZH,ZHANG L P,LIZH H.Imaging and errormodel of three-linear tridimensionalmapping camera[J].Opto-E-lectronic Eng.,2010,37(1):95-100.(in Chinese)
[8]王智.基于碳纤维复合材料的月基极紫外相机照准架结构设计[J].中国光学,2012,5(6):590-595. WANG ZH.Design of collimation frame structure for lunar-based extreme ultraviolet camera based on carbon fiber reinforced plstics[J].Chinese Optics,2012,5(6):590-595.(in Chinese)
[9]王智,李朝辉.月基极紫外相机光机结构设计[J].光学精密工程,2011,19(10):2427-2433. WANG ZH,LIZH H.Design of optical-mechanical structure for lunar-based extreme ultraviolet camera[J].Opt.Precision Eng.,2011,19(10):2427-2433.(in Chinese)
[10]苗健宇,张立平,翟岩,等.三线阵CCD立体测绘相机的集成装调[J].中国光学,2012,(4):366-372. MIAO JY,ZHANG L P,.ZHAIY,et al..Integrative assembly for three-line array CCD tridimensionalmapping camera[J].Chinese Optics,2012,(4):366-372.(in Chinese)
Analysis and exam ination on support frame of three-linear CCD cameras
ZHANG Li-ping,WANG Zhi*
(Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
*Corresponding author,E-mail:wz070611@126.com
In order to satisfy the requirements of a three-linear CCD camera for stiffness and stability and to improve its themapping accuracy,the structure design of the mapping foundation support of the camera was accomplished based on finite element analysis.Themode,self-weight deformation and light axis variation due to self-weight deformation were analyzed.A special detection toolwas developed based on the qualifications of themapping foundation support.The tracking detection to themapping foundation support in the processwas developed to verify the feasibility of the special detection tool and to assure its geometric accuracy.
tridimensional mapping camera;mapping foundation support;finite element analysis;verticality detection
TP732;V447.3
A
10.3788/CO.20130603.0402

张立平(1957—),男,吉林长春人,学士,研究员,硕士生导师,1982年于长春光学精密机械学院获得学士学位,主要从事航天光学遥感器的研制工作。E-mail:zhang_lp2005@163.com

王 智(1978—),男,山东寿光人,博士,副研究员,2000年于长春光学精密机械学院获得学士学位,2003年于长春理工大学获得硕士学位,2006年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事航天光学遥感器的结构设计研究。E-mail:wz070611@126.com
1674-2915(2013)03-0402-06
2013-02-13;
2013-03-17
国家自然科学基金资助项目(No.61108066)