箭载中继用户终端自跟踪测向技术
2013-04-25熊建林
喻 晓,熊建林,刘 斌,肖 磊
(1.北京遥测技术研究所 电子工程部,北京100076;2.西安电子科技大学 理学院,陕西 西安710071)
目前,我国已成功应用中继卫星系统S频段链路实现运载火箭遥测信息的实时回传。为实现高码率的遥测信息传输,使用中继卫星系统Ka频段链路。由于箭载中继终端Ka频段相控阵天线波束宽度较窄、开环指向计算误差、箭体姿态测量误差、安装误差等影响无法避免,而且,上述误差会对箭载中继终端Ka频段波束指向精度带来一定影响[1]。针对这一问题,提出一种多信息辅助自动角跟踪技术,该技术利用天线阵列实时接收的中继卫星前向信号,辅助火箭飞行位置、姿态等信息,计算箭星间指向角度,达到简化接收天线阵列、实现了有限空间条件下天线波束闭环跟踪,提高了天线指向精度。
1 箭载中继用户终端自动角跟踪系统
Ka频段箭载中继用户终端自动角跟踪系统,是利用接收S频段信标信号解算获取指向角信息以引导Ka天线发射,是由S频段有源接收天线阵、Ka频段测控终端以及Ka频段相控阵发射天线阵组成,其原理连接如图1所示。
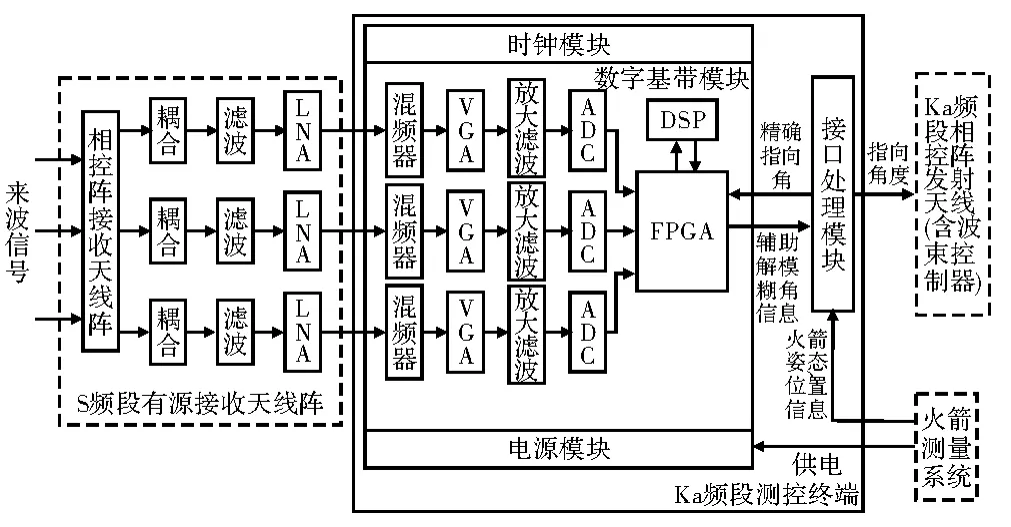
图1 Ka频段箭载中继用户终端自动角跟踪系统组成框图
S频段有源天线阵接收测量信号为伪随机码调制的BPSK扩频信号,测控终端首先完成对该测量信号进行快捕、精确捕获跟踪等工作,随即提取其载波瞬时相位值,并利用火箭飞行位置、姿态等辅助信息进行数字信号处理获得精确指向角度值,最后将该角度值发送至波控器,以控制Ka箭载相控阵发射天线发射角度。
2 多信息辅助测向技术
2.1 天线阵布局
干涉仪测向实质为根据两个天线阵元接收信号间相位差获取目标偏离天线轴线角度信息,箭载中继用户终端需要同时测量来波到达方位角、俯仰角,文中设计了一种三元天线阵,如图2所示。
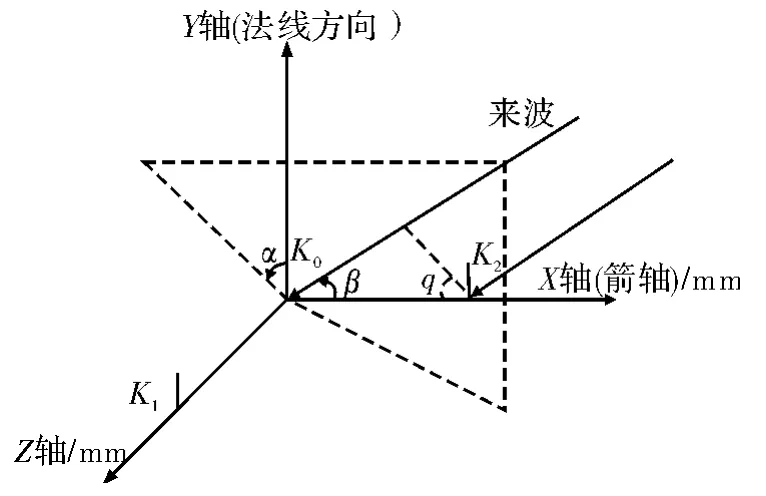
图2 天线阵布局原理图
设来波波长为λ;基线长为D;转换为箭载坐标系下的测向公式为
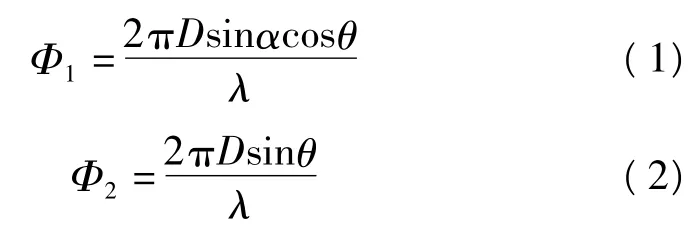
其中,Φ1是K0K1基线求得的相位差;Φ2是K0K2基线求得的相位差;角α为坐标原点到空间点矢径在垂直OX轴平面上的投影与箭体坐标系OY轴的夹角即方位角,逆时针方向为正;角β为坐标原点到空间点的矢径与箭体坐标系OX轴的夹角;角θ为角β余角即俯仰角。
2.2 多信息辅助解模糊技术
干涉仪测向体制具有灵敏度高、精度高、速度快等特点,但当其基线长度D>0.5λ时,一个入射角度将对应多个不同测量角度,因而产生“镜像模糊[2]”。故需要采用解相位差模糊技术解决干涉仪测向系统存在的最大无模糊视角范围与测向精度对天线间距要求的矛盾。
Ka频段箭载中继用户终端具有前向接收信号频段高、信噪比低,对设备小型化要求高等特点。对传统的干涉仪解模糊技术进行分析可知,长短基线法在高频测向中由于短基线的物理实现的限制无法利用,参差基线法和虚拟基线法在天线底盘面积受限时影响测向精度,而无模糊长基线无模糊测角法解模糊需要较高信噪比作为保证[3],相关干涉仪虽可不必进行解模糊工作,却存在天线阵元多、计算量较大等问题。为在有限空间条件下实现天线波束闭环控制,本文基于传统的长短基线解模糊技术,提出了一种多信息辅助解模糊技术,即以单基线干涉仪测量角误差保证测角精度,而利用已有的火箭飞行位置、姿态等辅助信息来完成干涉仪测向解模糊工作的技术。
利用火箭飞行位置及姿态信息计算指向角原理如图3所示,其中,αr、βr分别为计算所得的对应箭载坐标系中方位角、俯仰角余角角度值[4],精度为±3°[5]。

图3 程控跟踪指向角计算原理图
以俯仰角为例,解模糊公式如下
其中,Φ2是基线K0K2实测相位差;θr=90°-βr,Φ2r为根据程控跟踪指向角与基线K0K2长度计算所得相位差。解模糊过程如下:(1)得到长基线实测相位值Φ2。(2)根据箭载用户终端实时提供飞行器轨道及姿态信息,计算得到的火箭与中继卫星的指向角度θr,再根据此角度计算得到相位差值Φ2r。(3)改变k值,找出最接近Φ2r的唯一精确值Φ2。方位角的相位差解模糊过程即为将αr、θr带入式(1),再进行与俯仰角解模糊过程类似操作。
2.3 测向数据的优化
实际应用时,相位受到的扰动较大,在干涉仪测向过程中,可能会出现测向值大幅度突变的情况,为改善这种情况,可以对鉴相结果进行矢量平均以实现测向数据的优化。若鉴相方差为σ2,可利用在正态分布条件下,N点平均后方差变为σ2/N,利用这一点可以改善测向质量,提高测向精度。
相位差测量值的平均算法应采用矢量均值滤波的方法,即将对标量的均值滤波变为对矢量的均值滤波问题,由此解决相位差测量值模2π“周跳现象”带来的影响。
若标量相位差主值为Δφi(i=1,…,N),先构造复数序列exp(Δφi),对exp(jΔφi)求矢量平均得

反推标量相位差主值Δφ的平均值为

为获得连续的测角结果,应采用滑窗平均的方式进行数据处理。
3 仿真验证
考虑箭载环境对安装天线口径的容忍度,取D=400 mm,天线相位中心抖动误差±5 mm,信号归一化信噪比9.6 dB,多普勒频移率1.5 kHz/s,利用由火箭自身飞行姿态、位置等信息计算得到的指向角度进行相位差解模糊,以俯仰角为例,计算机仿真结果如图4所示。
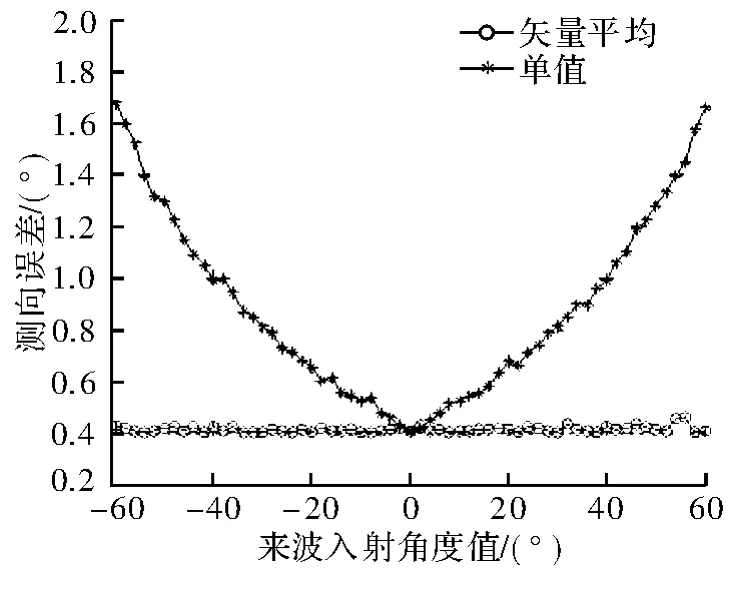
图4 多信息辅助解模糊法计算机仿真结果图
由仿真结果可知,多信息辅助解模糊法可完成箭载中继终端无模糊测向,若取单值做测向运算,测向精度为0.893 33° RMS,而利用矢量平均算法对相位差主值序列的质量具有较大改善作用,可大幅改善测向数据的质量,将测向精度提高至0.414° RMS。
仿真条件不变,图5为根据测向式(1)和式(2),利用多信息辅助解模糊进行的二维测角精度的计算机仿真结果,方位角测角精度为0.594° RMS,俯仰角测角精度为0.419° RMS。
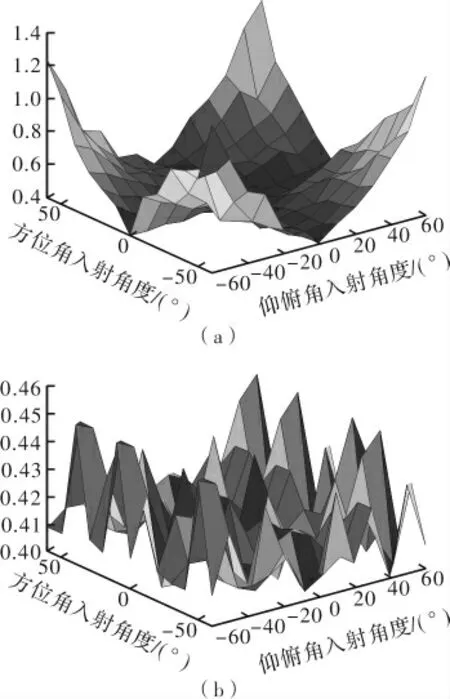
图5 二维测向测角精度计算机仿真图
针对箭载中继终端自跟踪测向方案充分利用已有的箭体数据信息,仅需要3个天线阵元即可完成无模糊测向工作,且测向过程中利用矢量平均算法对测向数据进行优化,有效提高了测向精度。与传统的长短基线法解模糊相比,减少了接收天线阵元数目,且克服了短基线的物理应用的瓶颈问题;与相关干涉仪相比,不需要预先存储原始样本,且天线阵体积更小,利用辅助信息进行解模糊的测向算法工程实现上仅需简单的比较和加减法即可完成,计算量大幅减小。
4 结束语
根据箭载中继用户终端技术要求,对箭载中继用户终端实现自跟踪系统提出了一种测向方案设计,即利用多信息辅助解模糊的干涉仪相位测角法。由仿真结果可知,该方法可在满足箭载设备尺寸限制的条件下,与已有程控跟踪方式相比,有效提高了发射天线指向角的精度,满足成功建立箭星间Ka频段通信链路对于发射天线指向精度≤0.8° RMS的要求,也放松了测控平台对系统输入的要求,可作为Ka频段箭载中继用户终端工程设计的参考。
[1] 司伟健,初萍.干涉仪测向解模糊方法[J].应用科技,2007,34(9):54-57.
[2] 骞尧.中继终端自动角跟踪接收机建模与仿真[J].现代电子技术,2010(19):39-42.
[3]JACOBS E,RALSTON E W.Ambiguity resolution in interferometry[J].IEEE Transcactions on Aerospace and Electronic Systems,1981(17):66-780.
[4] 张劲松,刘靖,高祥武.基于运载火箭的遥测传输技术[J].导弹与航天运载技术,2009(6):11-15.
[5] 刘靖,宋岳鹏.运载火箭天基测控天线覆盖性能分析[J].遥测遥控,2012(9):51-55.
[6] 骞尧.中继终端自动角跟踪接收机建模与仿真[J].西安邮电学院学报,2010,15(3):55-59.