四驱小车直流电机控制系统的设计与实现
2013-04-25姚长才
姚长才
(山东胜利职业学院 电气与自动控制系,山东 东营 257000)
1 概述
随着科技水平的不断提高,微电子和电机技术的结合取得了巨大成就。应用于机器人关节的直流电机控制[1],数控机床的精密控制,不便于进行有线设计的无线电机控制等技术成为当前直流电机控制系统设计的主题。直流电机伺服、数字一体系统及智能控制系统等应用在中国制造业转型中,许多科研机构和技术工作者对直流电机脉宽宽度调制(PWM)调速系统[2]提出了自己的设计方法。笔者以ARM9处理器作为数据处理中心,构建四驱小车直流电机PWM调速的无线控制系统。
2 系统设计
2.1 采用技术分析
将小功率直流电机精确控制技术应用在数字系统的设计和开发中,可以大大提高电机控制系统的应用范围和可控领域,通过比较常用的电机调速方法,最终确定采用PWM调速方法。
首先,发电机—电动机调速方法由于投入设备多、体积大、费用高、效率低、噪声大、维护不方便等缺点,除非特殊场合和需要,现在很少使用。其次,晶闸管—电动机直流调速系统在静差率要求不高的情况下,采用开环系统也可以满足要求[3]。但是在工业部门中,许多调速系统都要求有较高的静差率,开环系统是不能满足此要求的,因此必须采用闭环调速系统。根据反馈量的不同,可有转速、电流等负反馈调速系统。采用PWM调速系统,因为它具有下列优点:(1)电动机损耗、发热少;(2)动态抗干扰能力强;(3)稳速精度高,调速范围自由,特别是低速时电流脉动和转速脉动都很小,控制非常方便;(4)电路效率高,损耗小,控制简单,适于数字控制。
2.2 基本工作原理
脉宽宽度调制(PWM)是在控制电路输出频率不变的情况下,通过电压反馈调整其占空比,从而达到稳定输出电压的目的。
直流电压可由交流电通过整流得到,功率晶体管的基极用一个脉宽可调的电压驱动。
如图1所示,晶体管VT的基极由脉宽可调的脉冲电压Ub驱动,在一个周期内,当Ub为正时,晶体管导通使电流id流过电动机,电动机两端电压Ud等于Us;当Ub为负时,晶体管处于反向偏置而截止,id通过二极管VD续流,电动机两端电压Ud等于零。Ub为正值时,晶体管导通使电流id流过电动机,改变晶体管基极控制电压Ub的脉冲宽度,即可改变占空比。这样就可以在电动机电枢两端获得不同大小的平均电压(即直流电压)Ud,从而达到单方向调速的目的。这种通过调节晶体管基极控制电压Ub的脉冲宽度来调节电动机电枢电压的调速方法称脉宽调速PWM。

图1 不可逆脉宽调制调速电路及电压、电流波形图
2.3 无线电机控制系统整体结构设计
无线电机控制系统硬件如图2所示。
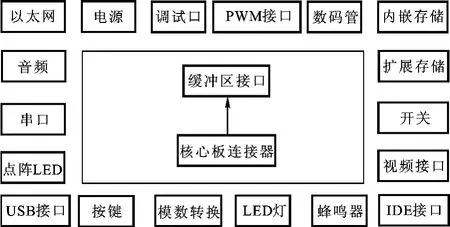
图2 无线电机控制系统硬件组成
根据系统整体设计目的,设计并实现一款能够进行远程遥控的无线电机控制模型。该模型要能够进行存储并进行简单数据处理,有一个电机驱动电路,通过中央数据处理器来实现通讯信号和电机驱动信号的协调。目前ARM处理器分为ARM7系列、ARM9系列、ARM11系列等[4]。虽然主频越高越好,但是考虑到开发工具和目前驱动支持设备的通用性,最终选择S3C2440ARM9这一主流芯片核心板作为控制中心。其正常电压工作主频为360 MHz,属于韩国三星公司成熟产品。该核心板采用6层板设计,PCB沉金工艺,面积为7.5cm*4.4 cm,通过双排1.27mil间距的插座将所有资源引出。板上主要集成了 S3C2440、NOR FLASH、NAND FLASH、MAX8860(高精度电源稳压芯片)、MAX811(复位芯片)、SDRAM、DM9000-100M以太网卡芯片及UDA1341TS音频芯片,简化了扩展板的设计,板上集成了NOR FLASH,核心板的SDRAM容量128M字节;从配置的基本情况看,它可以满足本系统从低速到高速的各种需求,本身自带的PWM接口可以实现电机信号的基本驱动。在试验过程中为便于观测和调试,将系统设计为一个四驱独立控制的移动系统,通过驱动板放大的PWM信号进行控制,实现远程 WiFi遥控[5]。
驱动电路利用LN298芯片进行功率放大,实现电机接口及电能匹配,在电路板设计工作中考虑到控制芯片的低电压和电机电压的不匹配,进行了供电区隔离设置,设定两个供电区,利用光电耦合实现信号传输和大电流的隔离[6],保证控制芯片的稳定工作,对电机驱动又能够提供足够的电力输出。具体结构见图3。

图3 系统结构
3 系统实现
无线电机控制平台由ARM9芯片提供智能计算功能,对数字信号、模拟信号的采集和输出进行控制[7]。在具体工作环境中,考虑到实际的电路损耗和部分不确定因素,在实现远距离电机控制时有一定的偏差,但是通过802.11a网络协议将获取的实际的电机转速和工作状态远程送回上位机服务器,也就是进行处理的数据中心,便可以实现无偏差远程控制。
处理器为ARM9S3CMINI2440R902T,内存为130M,外存为0M,操作系统为linux2.6.33,WiFi为TP-LINK821CCN,服务器为LENOVO-THINKPAD R60E6580,路由器为 TP-ROUT921A。电机为日本NAMIKI空心杯减速电机,型号为22CL-3501PG,电压为12VDC,转速120RPM。在实际系统中可将减速模块去掉进行机械匹配,但在本系统中为保证系统稳定和测试的方便进行了减速处理。四驱小车共有3块电路板,主板为Pz_Ni-mi_001.PCB,驱动板为Pz_nimi_002.PCB,控制接口板为Pz_nimi_003.PCB。
Pz_nimi_001.PCB板通过核心板主要接口完整地链接到控制接口板Pz_nimi_003.PCB,Pz_nimi_003.PCB板相当于是主板的成比例放大板,但是接口和引线及工作电压都做了相应调整。Pz_nimi_002.PCB驱动板是负责大功率信号驱动电机的电路板。控制接口板和驱动板的信号通过串口通讯实现互联。
调试过程中先进行通讯控制的联通测试,并且由ARM9中央处理器进行所有数据的处理,包括输入数字信号、模拟信号的采集及转换,信号标准的制定及匹配。电源系统由两块锂聚合电池供应,总电量达到4 500mAh。
S3C2440作为处理器,能够以最短的时间延迟将各种控制信号进行整合,无线信号的通讯通过支持WiFi协议的通讯模块实现,电源供应和运行控制均由直流+5V电源模块提供,WiFi系统和相关的传感接口的供电可同时由12V的直流系统通过电压控制分别输出5V和12V两种电压。
驱动板处理控制中心传来的电子信号(控制信号),并进行暂存和电平转换,通过PWM输出口链接直流电机,并利用自身的功率放大器驱动系统工作。
3.1 控制系统工作过程
当主程序开始工作时,初始化完成,所有硬件检测通过,系统进入正常工作状态。整个系统由ARM9—linux体系掌控。每个电机独立连接一套输入输出系统,控制信号能够实现四路并行,并且每个电机都有独立的PWM信号,可实现许多动作的控制,效果很好。控制流程见图4。
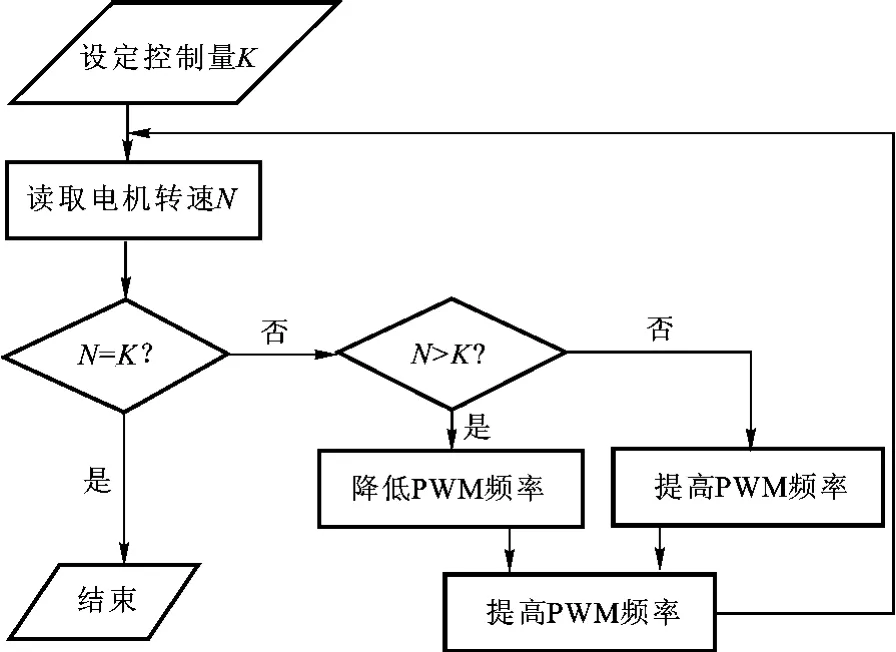
图4 电机控制流程
四驱小车的启动和停止均由上位机远程控制实现。控制程序通过码盘返回的电机实际转速和属性确定当前四轮电机的实际工作状态,利用积分函数实现速度控制。以下是部分程序,其作用是根据电机控制模型计算出电机各自的调整量。

3.2 软件系统构建
3.2.1 程序安装
(1)系统程序加载。通电之前,首先把NORFLASH开关拨到系统内核安装模式一侧,然后接通电源开机。在开机完成后,打开SecureCRT,其他超级终端通过连接线连接到整个平台上,在电脑正确连接ARM处理器后可以通过终端显示器看到烧写菜单。
(2)系统程序加载数据线安装。首先安装USB主从线驱动。当系统启动完成并将驱动安装好后,在PC端运行系统重构DNW软件,根据第一步中的烧写菜单选择按键V,在窗口标题栏出现标志,当看到标题栏显示“OK”时可以利用数据线传输数据。
(3)安装完成之后,PC终端界面返回DNW窗口,根据提示选择安装Zimage内核,完成第三步。
(4)选择Y,烧写rootfs,完成第四步。在程序下载过程中,前几步烧写比较快,最后一步烧写文件系统比较慢。
3.2.2 网络配置
(1)网络中心部分。频段设置:主网段选择6;电机平台端的IP地址要保证无冲突,并且工作顺畅。
(2)嵌入式操作系统部分。先进行路由器端网络类型配置,在屏幕端输入命令:#vim/etc/nettype.conf,选择无线;然后进行系统工作网络地址参数配置,在屏幕端输入命令:#vim/etc/net.conf;最后设置无线网络配置,在屏幕端输入命令:#vim/etc/wifi.conf;完成以上三步工作后,在屏幕端输入命令:#net_set,使最新的网络配置生效。
4 系统测试
4.1 数字控制的电机有关参数测试
数字控制系统数值在0~255时对应的电机转速、PWM信号的占空比和电压信号见表1。
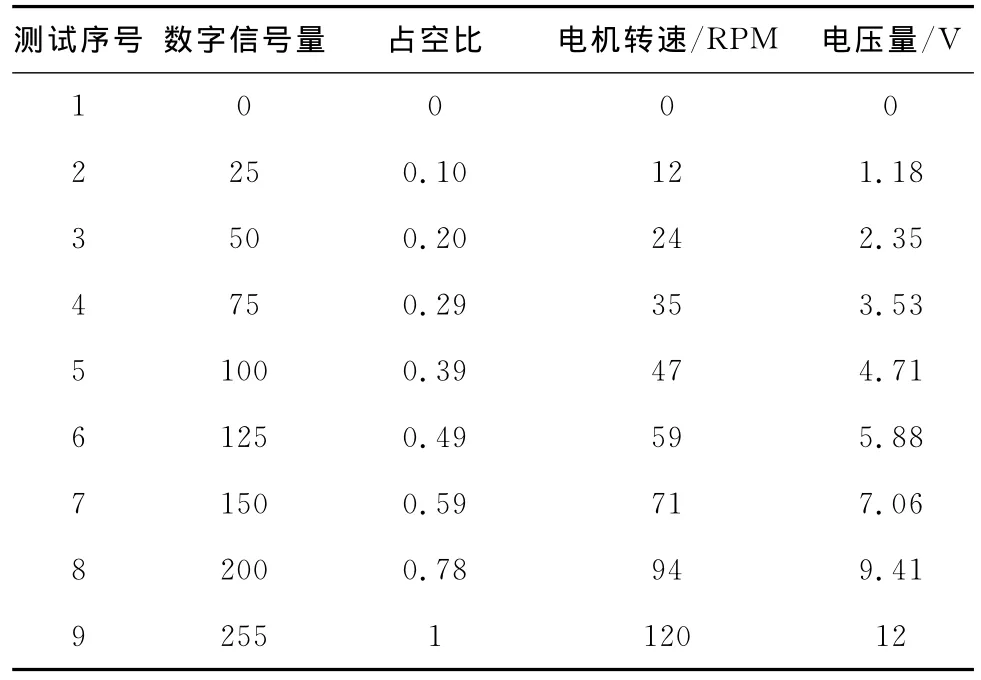
表1 数字控制的电机有关参数测试
表1表明,电机在不同的数字信号量控制下能实现不同的转速,且转速稳定。
4.2 输出控制信号稳定性
实际测试中选取了各种信号进行测试,以转速分别为35和120RPM时为例测试其PWM信号波形,见图5。
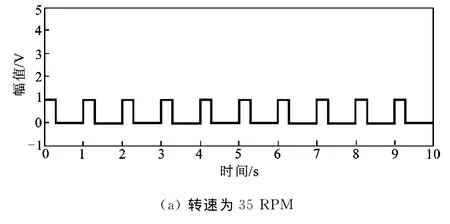

图5 PWM信号
从图5可以看出,电机在不同的转速下,其PWM信号波形正常,说明输出的控制信号稳定。
5 结束语
采用ARM9为中央处理器,选择日本NAMIKI直流电机作为控制对象,用脉宽宽度调制(PWM)调速的方法,建立的小功率直流电机控制系统能够对12V直流电机在多个速度状态进行设计开发,准确定位速度。通过测试表明,系统性能稳定可靠。本系统是针对一个四驱电机的小车模型而设计的,通过功率放大和改进设计可以应用到当前新能源汽车的四驱控制中。
[1]蔡自兴.21世纪机器人技术的发展趋势[J].南京化工大学学报,2000(4):73-79.
[2]李忠伟,王瑞和,房军.钻井液连续波传输的OQPSK调制原理与性能分析[J].中国石油大学学报:自然科学版,2011,35(5):70-75.
[3]张全柱,郝荣泰.开关磁阻电机的几种功率变换器拓扑的性能分析[J].电气传动自动化,1995,17(4):50-54.
[4]何臻祥,陈波.基于三星S3C2440Boot Loader的研究[J].软件开发与应用,2008,27(6):92-94.
[5]张维承,王勇.原始套接字在嵌入式Internet通信协议中的应用[J].计算机应用研究,2002(19):29-30,74.
[6]刘文涛,胡家宝.嵌入式 WEB服务器的分析与研究[J].计算机应用研究,2002(9):7-9.
[7]张湘,肖建.嵌入式系统及其硬件概述[J].电梯工业,2003,4(1):24-25.
