双环双通道接收数字式新算法的分析与设计
2013-04-23牛有田李宁宁曹向陶谢迎涛张优贤李丹丹
牛有田 李宁宁 曹向陶 贾 磊 王 政 谢迎涛 张优贤 李 玲 李丹丹
(河南师范大学物理与电子工程学院, 河南 新乡 453007)
引 言
潜艇等水下航行器在水下安全航行时,其导航定位是非常必要的. 甚低频(Very Low Frequency,VLF)无线电导航系统由于没有航位推算法、惯性导航法的累积误差而具有很大的优势. VLF信号在地-低电离层波导中传播[1-2],传播规律非常复杂. VLF频段不仅可以应用于水下导航与通信[3],而且可以应用于电离层探测、日食观测[4]等领域. 在水下接收VLF导航信号通常采用交叉环天线,一般情况下,水下通信和导航采用其中的一个环,另一个环不用. 这造成了在某一个方向上接收的信号强,而在某些方向上接收到的信号微弱. 怎样才能有效地利用双环进行通信和导航就显得非常有意义.
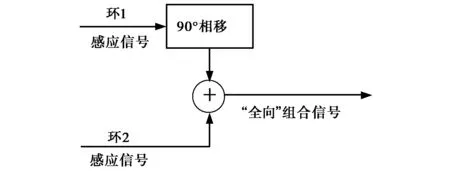
图1 模拟信号“全向”接收信号组合示意图
1 VLF导航信号的水下传播与接收
1.1 VLF入水传播基本特性
海水中电场水平分量
海水中电场垂直分量



根据以上结果,对于高导电的海水可进一步证明VLF入水传播具有以下五大特性:
5) 折射系数极小,即海水介面折射损耗非常大,对于10~15 kHz该项损耗约达66~68 dB.
1.2 水下接收天线的基本形式及特性
针对前述的水下VLF波传播的基本特性,在水下可有效接收的导航信号的基本电磁场分量为沿径向的水平电场分量或横向的水平磁场分量,接收径向水平电场分量通常采用拖曳的水平电天线,接收横向水平磁场分量通常采用环天线或磁性天线. 鉴于磁性天线属于环天线类,故在此仅考虑环天线的接收特性. 环天线的特性有二:其一,等效高度极低;其二,天线具有方向性,幅度方向图为“8”形方向图,含两个接收零点与两个波瓣,且两个瓣的感应信号相位相差180°.
1.3 克服环天线方向性不利影响的技术措施
为避免环天线方向图零点无效接收情况的出现,在水下接收VLF信号通常采用交叉双环天线. 在采用交叉环天线的情况下,为保证信号更有效的接收,通常有两种技术措施供选择:一种是选环,从交叉的双环中选择一个能最有效地接收信号的一个环作为实用的环,另一个环弃之不用,但怎样才算“最有效”,需自定一个选择的算法;另一种是将双环的信号组合起来,形成无方向性接收,即全向接收,但如何“组合”也需设计一种“算法”.
相位响应也存在着方向性,这种方向性对水下信号的接收与测相也将产生重大影响. 如何克服或修正这种影响,也将是“选环”与“组合”算法设计所必须考虑的一个问题.
2 组合算法的设计与分析
为克服图1中的技术障碍,设计了一种独特的处理方法,即不在如图1所示的“射频”级进行“组合”,而是在正交同步检波之后进行组合,从而有效地解决了这一难题.
令交叉双环的几何关系如图2所示,图中θ为信号到达方向.
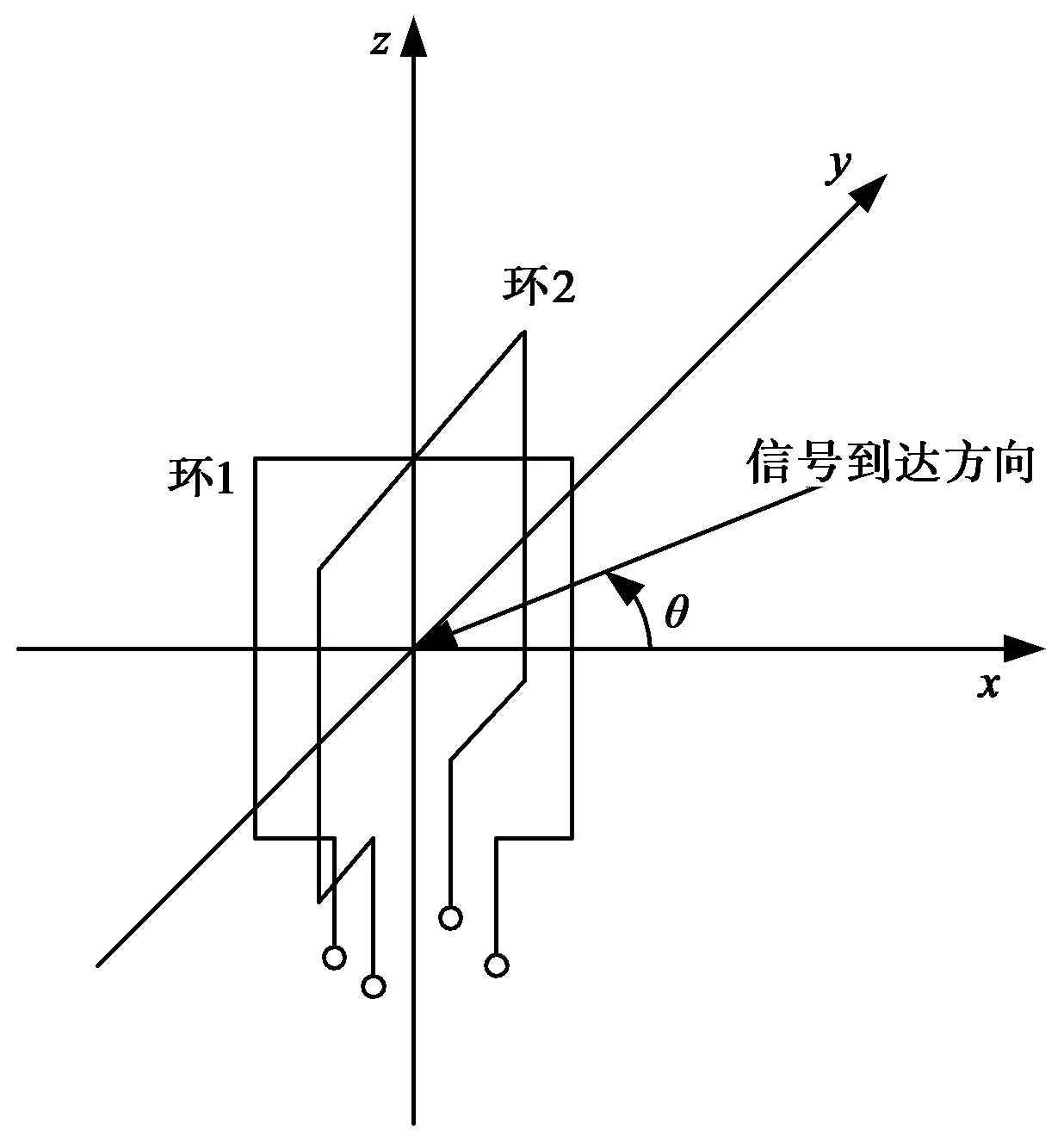
图2 交叉双环几何关系示意图
2.1 “组合”算法推导
设环1感应信号为
S1=Acosθsin(ωt-φ);
(1)
环2感应信号为
S2=Acos(θ-90°)sin(ωt-φ) .
(2)
式中:ω为信号角频率;φ为信号传播相延.
环1的正交同步检波信号为sin(ωt+β)和cos(ωt+β),β为检波信号初相. 环1的同步检波结果分别为
(3)
(4)
环1检波信号的幅度为
(5)
环1检波信号的相位为
(6)
(7)
环2的正交同步检波信号为sin(ωt+β+90°)和cos(ωt+β+90°). 环2的正交同步检波结果分别为
(8)
(9)
环2检波信号的幅度为

(10)
环2检波信号的相位为
(11)
(12)
双环检波信号迭加结果为
S=SS1+SS2
(13)
C=SC1+SC2
(14)
组合信号幅度为

(15)
组合信号相位为
(16)
(17)
2.2 分析与仿真
由以上结果可以看出,对于组合信号幅度A:
组合信号幅度A与来波信号到达方向θ无关,即实现了全向接收.
对于组合信号相位Φ:
1) 组合信号相位Φ除了与信号相位φ有关以外,还与同步检波信号初相β以及来波到达方向θ有关;
2) 为从组合信号中提取信号相位φ,必须消去检波信号初相β以及信号到达方向θ;
3) 在采用测距差的导航定位体制中,β可自动消除;
4) 为消去θ,必须解决θ值的准确预测问题. 鉴于θ仅取决于交叉环天线的取向、发收点的几何关系,且这些量在实用中都可已知,所以,θ值的预测不存在技术难题.
实际上,由式(5)~(7)和(10)~(12)可以看出:虽然单环检波信号的幅度与来波到达方向θ有关,但是单环检波信号的相位与来波到达方向θ无关. 所以,在求信号的相位时,可以采用信号幅度较大的环,同样在采用测距差的导航定位体制中,β可自动消除,这样计算原始信号的初始相位更简便.
为了验证数字式新算法的有效性,利用Matlab7.0.1 Simlink进行了仿真[8]. 图3为双环双通道数字式新算法的Simlink仿真图,Sine Wave1和Sine Wave2为频率为12 kHz的正弦波,可以作为原始信号,在此采用数字信号形式,其幅度设为10,初始相位φ设为π/4. 角度Ceita作为来波信号到达方向θ,设为π/12. Vector Scope1和Vector Scope2示波器上显示的信号可以仿真天线环1和环2上的感应信号. Sine Wave3、Cos Wave作为环1的正交同步检波信号, Sine Wave4、Cos Wave1作为环2的正交同步检波信号. 正交同步检波信号的初始相位β设为π/6. 四个检波低通滤波器采用Equiripple类型(即等纹波)的有限冲击响应数字滤波器,其主要参数为:Filter Order,Minimum order;Fs,80 kHz;Fpass. 12 kHz;Fstop,12.1 kHz;Apass,1 dB;Astop,80 dB. A Display和Fai Display显示的是组合信号的幅度(式(15))和原始信号的初始相位φ(公式(17));Fai Display1和Fai Display2显示的是分别由环1(式(7))和环2(式(12))单独计算出的原始信号的初始相位φ.
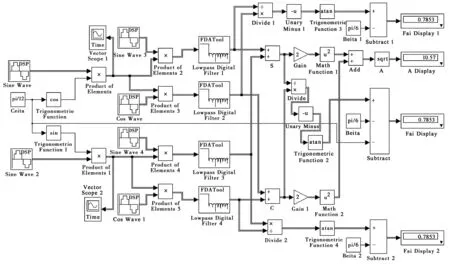
图3 双环双通道数字式新算法Simlink仿真图
经过仿真可以发现,当来波信号到达方向改变时,交叉环天线的环1和环2上感应信号的幅度也都随之改变,在0到10之间变化,即存在方向性. 新的数字式组合信号的幅度并不随来波方向改变而改变,即实现了全向接收. 对于相位,可以看到:由组合信号相位计算出的原始信号初相位为0.785 3,即π/4,与原始信号设定的初始相位相等,但其计算需要来波方向角度Ceita的参与. 而由单环检波信号计算出的原始信号初相位同样为0.785 3,都与原始信号设定的初始相位相等,却不需要来波方向的参与. 因此,后一种方法计算信号的相位更简便.
3 双环双通道接收
根据以上的分析,基于软件无线电技术的双环双通道接收机原理简单的示意图如图4所示.
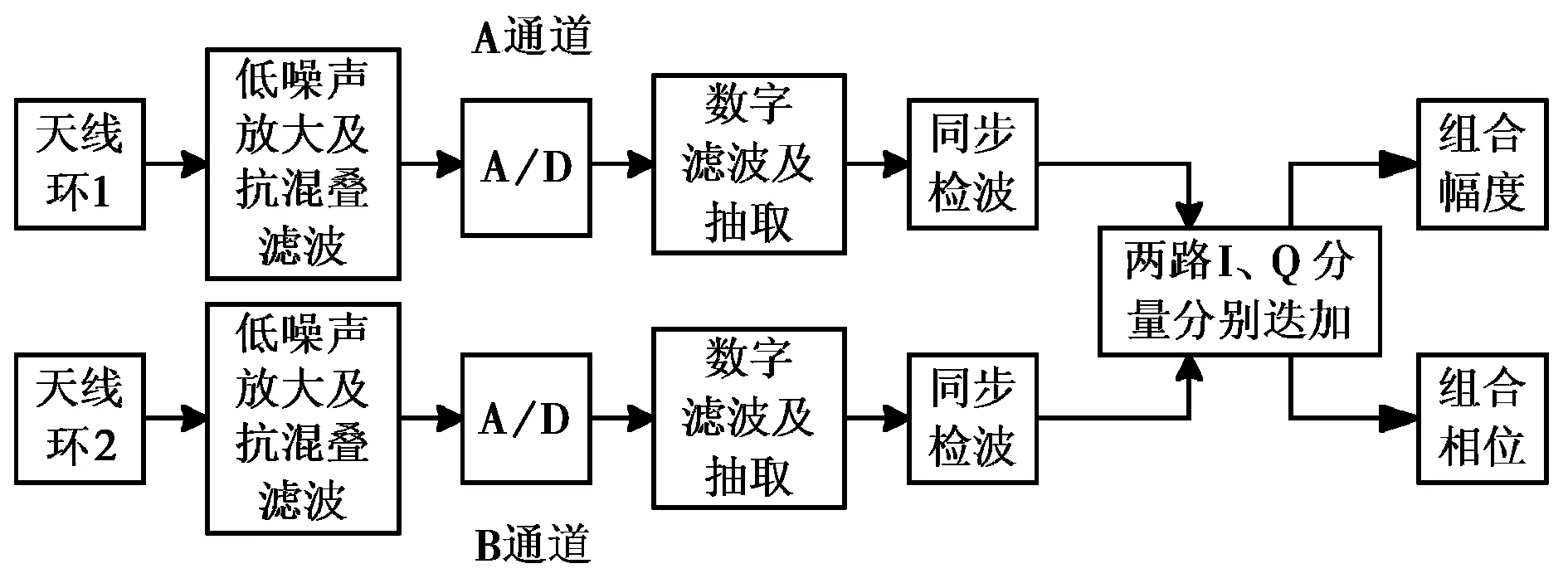
图4 基于软件无线电的双环双通道接收机原理示意图
为确保有效的接收,以便确保水下导航定位达到尽可能的深度,选环遵循以下三个原则:
1) 在两个环中选择最强信号感应电平高者;
2) 在两个环中选择不同台信号感应电平均衡者;
3) 在两个环中选择所有来波信号都处于环天线的同一波瓣中者.
为了确保最有效的接收,除了可选用“组合”算法与“选环”算法以外,还可采用“混选”算法. 该种算法与“选环”算法最根本的区别是:它不是从两个环中选一个环,而是同时从两个环中选取一组信号,使该组信号感应电平最强. 这组信号可来自不同的环不同的波瓣. 当采用这种算法时,为确保定位的可靠性,必须对来自不同环与不同波瓣的信号引入环天线不同波瓣180°相位突变的修正.
4 结 论
在双环接收的具体实施中,不论选择三种算法中的哪种算法,为确保定位的可靠性,都必须满足如下两项实施要求:①确保双环双信道两者的总体幅相响应的均衡;②在A/D中应确保两路信号的同时采样. 该算法已经在我们研制的基于软件无线电技术的VLF双通道接收机中实现,完全达到了设计的要求. 另外,该设计方法不但可以用在VLF水下导航系统中,而且可以应用在VLF水下通信系统中,还可以用在其他水下航行器的控制与导航系统、遥控水雷的控制接收系统中.
[1] BUDDEN K G. The Waveguide Made Theory of Wave Propagation[M]. London: Cambridge University Press, 1961.
[2] KAISER A B. VLF propagation over long paths[J]. Journal of Atmospheric and Terrestrial Physics, 1967, 29(1): 73-85.
[3] 郭定荣, 陆 洪, 陈 宇. 船载ULF/VLF对潜通信系统可行性分析[J]. 电波科学学报, 2011, 26(6): 1148-1152.
GUO Dingrong, LU Hong, CHEN Yu. The feasibility analysis of shipborne ULF/VLF submarine communication[J]. Chinese Journal of Radio Science, 2011, 26(6): 1148-1152. (in Chinese)
[4] 牛有田, 陈建锋, 郝好贞, 等. 1997-03-09日全食的甚低频观测与分析[J]. 河南师范大学学报:自然科学版, 2009, 37(2): 64-66.
NIU Youtian, CHEN Jianfeng, HAO Haozhen, et al. Observation and analysis of total solar eclipse of 1997 March 9 using VLF signal[J]. Journal of Henan Normal University: Natural Science, 2009, 37(2): 64-66. (in Chinese)
[5] 蔡 樱, 张祖荫. 甚低频水下全向数字接收技术[J]. 舰船电子工程, 1999(6): 38-42.
CAI Ying, ZHANG Zuyin. All-around digital technique receiving VLF signals under water[J]. Ship Electronic Engineering, 1999(6): 38-42. (in Chinese)
[6] 王 伟, 郭大江. 甚低频遥控水雷全向数字接收机的研究[J]. 现代电子技术, 2007(12): 1-3.
WANG Wei, GUO Dajiang. Research of all-around digital receiver based on very low frequency remote-controlled naval mine[J]. Modern Electronics Technique, 2007(12): 1-3. (in Chinese)
[7] 田育庶. “长河四号”VLF传播综合研究报告[R]. 青岛: 中国电波传播研究所, 1970.
[8] 张德丰. MATLAB/Simulink建模与仿真实例精讲[M]. 北京: 机械工业出版社, 2010.