增程式电动汽车增程器开/关机时刻的优化
2013-04-17牛继高
牛继高,周 苏,2
(1.同济大学汽车学院,上海 201804;2.同济大学中德学院,上海 200092)
前言
纯电动汽车具有零排放、高效率、不依赖石油和运行安静、平稳等优点。但由于蓄电池的能量密度低和行驶里程短使它尚不能与传统内燃机车辆相竞争。为了延长电动汽车的续驶里程,将燃油发动机和电机组成的发电机组作为增程器(range extender,RE),配以合适的油箱,与动力蓄电池一起构成动力源。较小功率的RE按行驶工况提供辅助功率或给蓄电池充电,可以有效增加车辆的总续驶里程[1-4]。增程式电动汽车(extended-range electric vehicle,EREV)可通过充电装置从电网获得电能,燃料消耗低,能够减少大气污染,降低对石化燃料的依赖和温室气体的排放[5-6]。
如何协调动力蓄电池和增程器之间的供能是E-REV开发中必须解决的问题。目前对E-REV的研究主要集中在动力系统参数匹配方面[2-3,7],EREV多采用串联式动力系统结构,针对串联式混合动力汽车(series hybrid electric vehicle,SHEV)的研究主要集中在动力系统参数匹配和能量管理策略方面。研究表明,采用串联式结构的车辆可将发动机调整在最佳工作点附近稳定运行,并通过直接起停技术取消发动机怠速,从而提高发动机效率,并减少废气排放[8-10]。
本文中针对一款E-REV,在研究发动机定点能量管理策略的基础上,以目标行程为约束条件,结合E-REV典型行驶工况,对增程器的开/关机时刻进行优化,以达到进一步提高车辆燃油经济性的目的。
1 E-REV结构、参数和工况
1.1 E-REV动力系统结构
图1为串联式E-REV动力系统结构,蓄电池作为主动力源,提供一定的续驶里程Sev,并保证车辆的动力性能和再生制动能量的回收[11]。RE给驱动电机提供辅助功率和/或为蓄电池充电,以增加续驶里程。
1.2 用于仿真的E-REV参数
用于仿真的E-REV基本参数和性能要求见表1。车辆动力性和续驶里程要求是E-REV动力系统部件选型的两个主要指标。根据表1的数据,选定了除RE之外的动力系统部件,主要参数如表2所示[2]。本文中基于这些参数和性能要求,开展EREV能量管理策略的仿真研究,给出确定RE重要参数的参考方法。
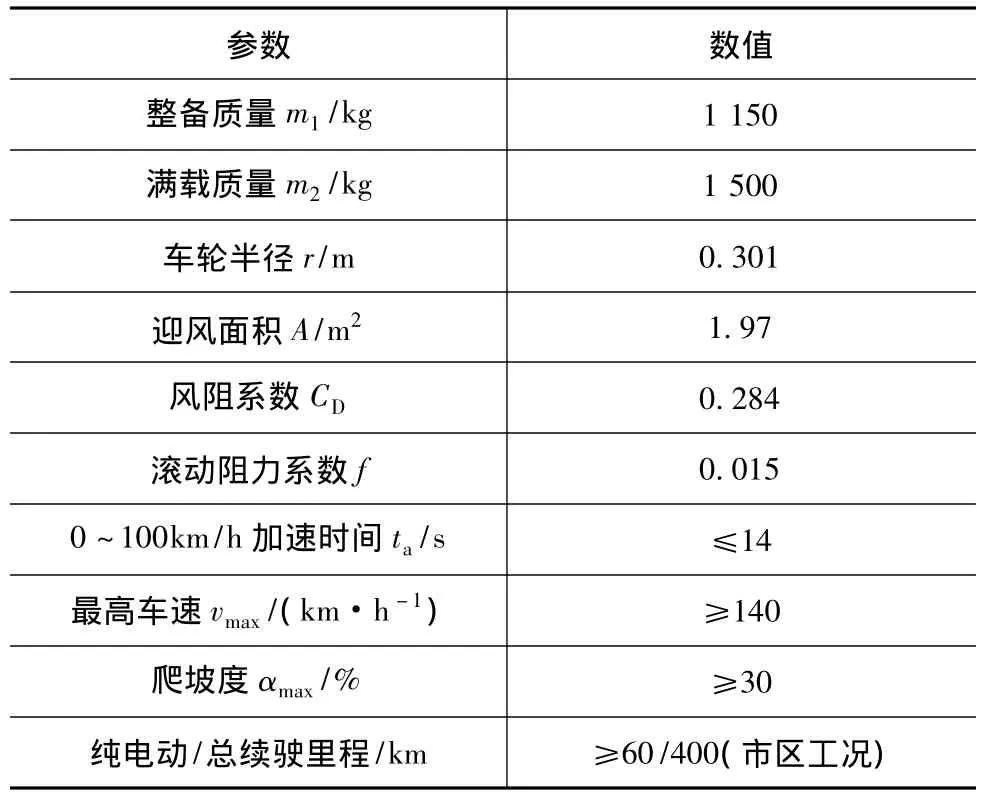
表1 E-REV基本参数和动力性要求

表2 动力传动系统部件主要参数
1.3 仿真工况的选取
本文中研究的E-REV有短途(如在城市内)和长途两种行驶模式,分别对应于动力系统的纯蓄电池供电模式和RE/蓄电池供电模式。在纯蓄电池供电模式下,E-REV只用蓄电池储存的电能驱动车辆,可以满足日常工况的需要。在RE/蓄电池供电模式下,要求E-REV能在低速或高速工况下具有更长的续驶里程,以满足长途行驶的需要。因此,为了体现城市和公路两种典型行驶条件的特征[12],本文中选用城市工况FTP-72和公路工况HWFET、新欧洲工况NEDC和中国乘用车市区工况CUDC[13]4种典型循环工况进行研究。
2 发动机定点能量管理策略
2.1 发动机恒定功率的计算
E-REV采用定点能量管理策略时,发动机/发电机的运行完全由蓄电池的SOC来控制,即允许RE在蓄电池SOC高于SOC上限SOCHigh之前输出设定的恒定功率,然后,关闭RE,E-REV零排放纯电动行驶。当SOC降到其设定的下限SOCLow时,RE再次起动,输出恒定功率。由于发动机与路面负荷相脱离和蓄电池的负荷均衡作用,发动机能够工作在燃油效率较高的恒定工作点[14-16]。
考虑到4种典型循环工况中HWFET工况的平均车速最高,因此参照该工况来确定发动机定点输出功率Peng。
蓄电池和RE须满足车辆行驶工况的总能量需求为
式中:Ebatt、ERE和Etotal_req分别为蓄电池输出能量、RE输出能量和车辆行驶总能量需求,kJ。
为了求得Etotal_req,可选取E-REV纯蓄电池供电模式,在HEFET工况下进行仿真计算。单个HWFET工况下,车辆的总需求能量为
式中:Tcyc为工况时间,s;Pbatt为蓄电池功率,kW;Ebatt_dri、Ebatt_reg和Eacc分别为蓄电池输出的驱动能量、回馈的再生制动能量和车辆附件消耗的能量,kJ。
根据上述分析,发动机输出的恒定功率须满足:
式中ηgen为发电机效率。
根据式(1)~式(5),化简得到发动机定点输出功率 Peng,即
根据表1和表2的数据,FTP-72和HWFET工况下的数值仿真结果如表3所示。
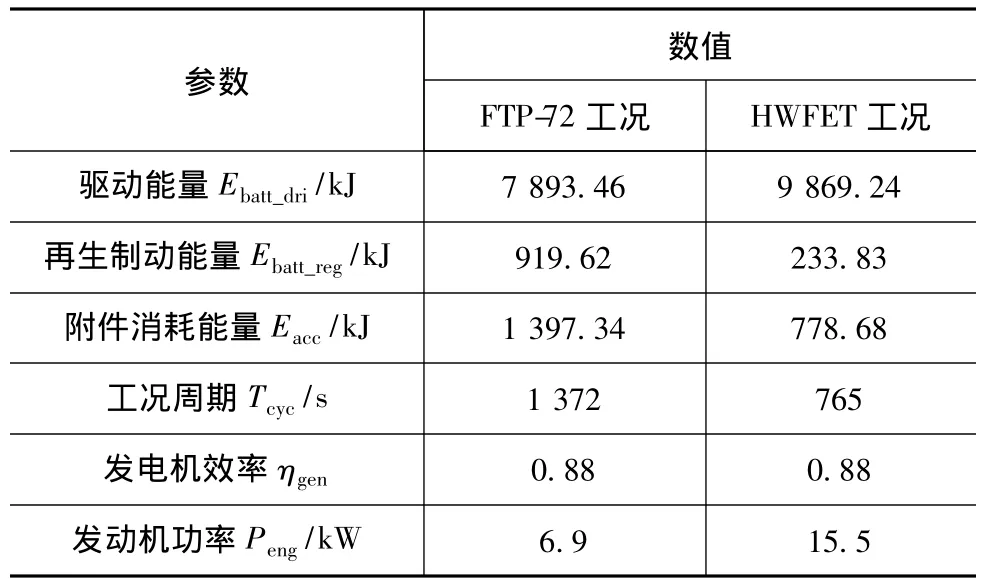
表3 市区和公路工况下的发动机定点输出功率
采用上述方法,FTP-72、HWFET、NEDC 和CUDC 4种典型工况下所需的发动机恒定功率仿真结果分别为6.9、15.5、7.6和5.3kW。从仿真结果可以看出,市区工况下的发动机恒定功率需求远小于公路工况,为了同时满足市区和公路工况下的功率需求,应根据HWFET工况来确定发动机的定点输出功率。
2.2 发动机工作点的选择
图2为发动机等燃油消耗率曲线。E-REV采用串联式动力系统结构,利用发动机与路面负荷相脱离的特点,控制发动机工作在燃油消耗率低的中高负荷区。通过直接起停技术取消发动机怠速,使发动机起动后即工作在恒转速恒转矩工况点(A点),其转速和转矩分别为3 000r/min和50N·m,发动机输出恒定功率为15.7kW,能够满足HWFET工况下15.5kW的平均功率需求。
2.3 发动机定点能量管理策略
发动机定点能量管理策略从优化发动机工作点出发,兼顾蓄电池SOC的平衡,是比较直接和常用的SHEV能量管理策略。
图3为20个CUDC工况下,蓄电池SOC和发动机功率随行驶距离的变化关系。其中,发动机恒定功率取15.7kW,蓄电池SOC初值为1.0,为了确保蓄电池性能并延长其使用寿命,増程模式下SOC的充放电区间取0.3~0.7[17]。从图3的仿真结果可以看出,当蓄电池SOC下降到0.3时,RE起动,发动机在预定的高效工况点工作,其中一部分功率用于驱动车辆行驶,剩余部分给蓄电池充电,使蓄电池SOC值持续升高。当蓄电池SOC升高到0.7时,发动机停机,E-REV纯电动行驶。如此反复,直至耗尽油箱内的燃油。
3 增程器开/关机时刻的优化
E-REV 在FTP-72、NEDC、CUDC和HWFET 4种典型工况下,纯电动续驶里程的仿真结果分别为73.5、61.8、75.6 和 71.9km,能够满足不小于 60km的设计要求。当E-REV的目标行程D大于Sev0时(Sev0表示由蓄电池SOC初值确定的E-REV纯电动续驶里程,该值不大于Sev),目标行程的长短将会影响发动机的运行时间和开关机次数,进而影响车辆的燃油经济性。为了充分利用来自电网的蓄电池能量,要求E-REV行驶过程中尽量减少发动机开关机次数和行车充电时间。因此E-REV长途行驶时,应考虑对RE的开关机时刻进行优化。
3.1 两种优化方法的比较
图4为中国乘用车市区工况下,目标行程为90km时,原定点能量管理策略的仿真结果。
从仿真结果可以看出,蓄电池SOC下降到0.3(M点)时起动发动机,SOC到达0.637(N点)时完成90km的目标行程。在整个目标行程范围内,包含了纯电动运行和行车充电两个过程,发动机行车充电时间(MN段)为2 244s。
为了尽量缩短发动机的行车充电时间,可采用两种方法对原控制策略进行优化。
(1)纯电动行驶过程中提前起动发动机
图5为控制策略优化后,发动机提前开机的仿真结果。由图可见:在纯电动行驶阶段,当蓄电池SOC下降到0.599(A点)时即起动发动机,在完成目标行程的同时,能使蓄电池SOC恰好降到0.3附近(C点)。在此过程中,发动机行车充电时间为664s,与优化前的控制策略相比,发动机运行时间减少了70.4%。
(2)行车充电过程中提前关闭发动机
图6为控制策略优化后,发动机提前关机的仿真结果。由图可见:在行车充电过程中,当蓄电池SOC上升到0.396(F点)时,发动机提前关机,发动机运行时间为605s,同优化前相比减少了73%;在随后的FG段,E-REV纯电动行驶,G点的SOC值为0.300 2。
两种优化控制策略均以E-REV的目标行程为约束条件,通过优化发动机的开/关机时刻,使发动机给蓄电池充入的电能刚好能在下一次外接充电之前用完。该定点能量管理策略有以下优点:(1)减少发动机的运行时间,节省燃油,减少排放;(2)充分利用蓄电池中储存的电能,节约出行成本;(3)便于下一次蓄电池外接充电,充分利用电网电能。
3.2 开/关机时刻公式推导
在发动机恒定功率确定的情况下,目标行程终点处的蓄电池SOC值与初始SOC、循环工况、目标行程长短和充放电区间等因素有关。因此,须结合不同的循环工况来确定发动机的开/关机时刻。
用参数a表示蓄电池SOC从初始值下降到0.3过程中单位SOC的行驶里程;参数b表示SOC从0.3充电到0.7的行车充电过程中单位SOC的行驶里程;参数c表示SOC从0.7下降到0.3的纯电动行驶过程中单位SOC的行驶里程。FTP-72、NEDC和CUDC 3种工况下,参数 a、b、c的仿真结果见表4。

表4 不同工况下单位SOC的行驶里程
采用纯电动行驶过程中发动机提前起动的方法,结合图5,则E-REV的目标行程为
式中:D为目标行程,km;SOC0为蓄电池 SOC初值,%;SOCeng_on为发动机提前起动时所对应的蓄电池荷电状态,%。
根据式(7),化简得到发动机提前起动时的SOCeng_on为
采用行车充电过程中发动机提前关机的方法,结合图6,E-REV的目标行程为
D=a(SOC0-30)+(b+c)(SOCeng_off-30)(9)
根据式(9),化简得到行车充电过程中发动机提前关机时的SOCeng_off为
式(8)和式(10)仅适用于目标行程介于(Sev0,Sev0+Schar+Sev1]的情况。其中,Schar为蓄电池 SOC由0.3充电到0.7时的行车充电行程;Sev1为SOC由0.7降到0.3时的纯电动行程。根据表4中的参数和蓄电池SOC初值,可以计算不同循环工况下的Sev0、Schar和 Sev1。
当目标行程D大于(Sev0+Schar+Sev1)时,可采用行车充电过程中发动机提前关机的方法,对发动机关机时的SOC值进行修正。设发动机累积起动次数为n,则目标行程满足:
根据式(11)和式(12),化简得到发动机提前关机时的SOCeng_off为
3.3 优化前后仿真结果的比较
将原有的发动机定点能量管理策略和优化后的策略都导入在 AVL-Cruise/Simulink中建立的EREV整车前向仿真模型中,进行仿真计算。选取FTP-72循环工况,蓄电池初值SOC0取0.9,目标行程为100km。
根据表4中FTP-72工况下的 a、b、c数值,Sev0、Schar和Sev1的计算结果分别为63、27.2和37.7km。因此100km的目标行程满足(63,127.9]的条件,可利用式(8)和式(10)对发动机开关机时的SOC控制参数进行修正。图7为FTP-72工况下的仿真结果。
表5为FTP-72工况下,定点能量管理策略优化前后,SOC控制参数的变化情况和发动机运行时间的比较。目标行程为100km时,由式(8)和式(10)得出发动机提前开机和关机时的SOC控制参数为0.462和0.528,与优化前的策略相比,发动机运行时间分别减少了43.3%和42.4%。通过对NEDC和CUDC工况的仿真分析,也能得到类似的结果。

表5 FTP-72工况下优化前后结果比较
为了验证发动机多次起动的优化效果,选取CUDC为仿真工况,蓄电池SOC0取1.0,目标行程为220km,仿真结果见图8。
由图可见:整个过程中发动机起动3次,在第3次起动后对蓄电池SOC值进行修正;当SOC上升到0.465时关闭发动机,利用RE给蓄电池充入的电能正好能够完成后面的里程。与优化前的策略相比,发动机运行时间减少21.4%。
从以上仿真结果可以看出,在纯电动和行车充电过程中,通过控制发动机的开/关机时刻,可较大程度地减少发动机的运行时间,因此燃油消耗量和由于蓄电池充放电损失的能量也会大幅度减少。
4 结论
本文中针对E-REV开发中的能量管理策略问题,分析了常用的定点能量管理策略,并在此基础上,结合E-REV的行驶模式和动力系统特点,以目标行程为约束条件,对RE的开关机时刻进行优化,提出了一种适合E-REV的定点能量管理策略。在选定的循环工况下,利用AVL-Cruise/Simulink软件平台进行了仿真。根据仿真结果得出以下结论。
(1)利用串联型动力系统结构中发动机与路面负荷相脱离的特点,控制发动机工作在燃油消耗率低的中高负荷区,有利于E-REV尽可能获得好的燃油经济性和低的排放。
(2)优化后的控制策略,可以根据不同的循环工况和目标行程对发动机的开/关机时刻进行精确控制,能够有效减少发动机行车充电时间,有利于降低燃油消耗和废气排放,同时也便于下一次蓄电池外接充电,充分利用电网电能。
[1] Patrick M Walsh,et al.An Extended-Range Electric Vehicle Control Strategy for Reducing Petroleum Energy Useand Well-to-Wheel Greenhouse Gas Emissions[C].SAE Paper 2011-01-0915.
[2] 周苏,牛继高,陈凤祥,等.增程式电动汽车动力系统设计与仿真研究[J].汽车工程,2011,33(11):924 -929.
[3] Zhou Su,Li Feihong,Tiancai M A,et al.A Study on Fuel Cell Range Extender[C].2011 International Conferenceon Electric Information and Control Engineering(ICEICE),2011:4746 -4749.
[4] Fang Yunzhou,Zhao Han,Peng Qingfeng,et al.Research on Generator Set Control of Range Extender Pure Electric Vehicles[C].Power and Energy Engineering Conference(APPEEC),2010.
[5] Masayuki Komatsu,et al.Study on the Potential Benefits of Plugin Hybrid Systems[C].SAE Paper 2008-01-0456.
[6] Jin Liqiang,Zeng Xiahua,Wang Wei.The Control Strategy and Cost Analysis for Series Plug-in Hybrid Electric Vehicle[C].2nd IEEE International Conference on Advanced Computer Control,2010:350-354.
[7] 周苏,李飞鸿,马天才,等.车用可插拔式燃料电池增程器匹配设计研究[J].汽车工程,2011,33(9):818 -822.
[8] Wirasingha S G,Emadi A.Classification and Review of Control Strategies for Plug-in Hybrid Electric Vehicles[C].5th IEEE Vehicle Power and Propulsion Conference(VPPC 09),2009:111 -122.
[9] Mehrdad Ehsani,Yimin Gao,Ali Emadi.现代电动汽车、混合动力电动汽车和燃料电池车—基本原理、理论和设计[M].倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2010.
[10] Vincent Freyermuth,Eric Fallas,Aymeric Rousseau.Comparison of Powertrain Configuration for Plug-in HEVs from a Fuel Economy Perspective[C].SAE Paper 2008-01-0461.
[11] Tate E D,Harpster Michael O,Savagian Peter J.The Electrification of the Automobile:From Conventional Hybrid,to Plug-in Hybrids,to Extended-Range Electric Vehicles[C].SAE Paper 2008-01-0458.
[12] 彭涛,陈全世.并联混合动力电动汽车的模糊能量管理策略[J].中国机械工程,2003,14(9):797 -800.
[13] 中国汽车技术研究中心.QC/T 759—2006汽车试验用城市运转循环[S].http://www.gb99.cn/.
[14] Neglur S,Ferdowsi M.Effect of Battery Capacity on the Performance of Plug-in Hybrid Electric Vehicles[C].2009 IEEE Vehicle Power and Propulsion Conference,2009:649 -654.
[15] 陈全世,朱家琏,田光宇.先进电动汽车技术[M].北京:化学工业出版社,2007.
[16] 王成,郭淑英,刘凌.串联式混合动力系统在公交客车中的开发与应用[J].机械工程学报,2009,45(2):18 -24.
[17] 张华辉,齐铂金,庞静,等.动力锂离子电池荷电状态估计的建模与仿真[J].哈尔滨工程大学学报,2009,30(6):669 -675.
