基于凸轮的全自动太阳跟踪装置的设计*
2013-04-16韩丽艳刘雪峰刘占民
□ 韩丽艳 □ 刘雪峰 □ 刘占民
北京石油化工学院 机械工程学院 北京 102617
每天太阳的位置是在时刻不停地变化的,太阳跟踪装置能够实时跟踪太阳位置,在太阳直接辐射资源观测、太阳能跟踪利用方面有大量应用。通常情况下太阳跟踪器有两种跟踪模式,一种是晴天模式下,利用四象限传感器和GPS时钟自动进行时间和位置修正;一种是阴天模式下,利用程序计算太阳位置进行跟踪[1],但存在价格昂贵、野外维护保养复杂等问题。
本文根据地球自转与公转的原理,设计了一种以凸轮为核心、无需程序控制的全自动太阳跟踪装置,可结合任何地点的纬度和时间进行太阳跟踪,日落后执行机构按照与实际跟踪轨迹相反的方向返回初始位置,避免了机构的卡死和仪器信号线的缠绕。该装置经济实用、安全可靠,适合光伏电厂光伏阵列野外长期太阳跟踪的需求。
1 工作原理
地球时刻不停地围绕太阳按偏心率0.017的椭圆轨道公转,太阳位于椭圆的一个焦点上,同时,地球还以23.934 h的周期自转[2],自转轴与公转轨道面夹角为23.439 281°(即黄赤交角,此处为公元2000年数据)。可见,地球上同一地点在不同时刻、不同季节,对太阳的视角(方位角和高度角)是不同的,这就是太阳每天时角和四季赤纬角的变化。全年太阳赤纬角的变化在夏至和冬至时刻出现极值,分别是正负23.5°,全年赤纬角的变化约47°,每天赤纬角的变化为:

时角的变化为:

如此,太阳跟踪装置的时角变化和赤纬角变化可以由如图1所示的机构实现。
2 机构设计
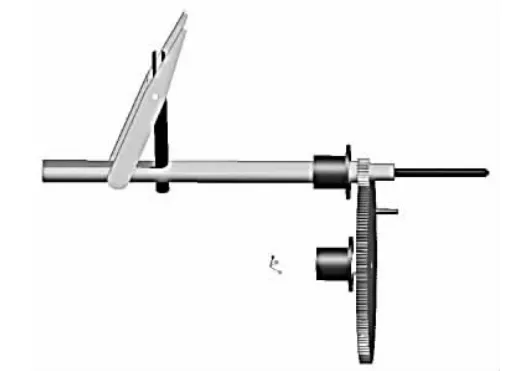
▲图1 太阳跟踪装置原理机构图
太阳跟踪装置中的机构有齿轮、凸轮、齿形带等。
2.1 齿轮设计
(1)选择齿轮材料及精度等级。
小齿轮选用45钢调质,硬度HB1=250 HBS;
大齿轮选用45钢正火,硬度HB1=210 HBS。
(2)确定许用接触应力。查机械设计手册,齿面接触疲劳极限应力为:
σHlim2=540 MPa
则大齿轮许用接触应力:

式中:SF为安全系数。
(3)几何尺寸计算。查表取标准模数m=1 mm。根据机械设计手册,对齿轮的主要参数进行选择和计算,见表1。

表1 齿轮设计结果
2.2 凸轮设计
凸轮采用摆动尖端推杆盘形凸轮机构,即摆动从动件随机架一起以等角速度绕一点转动,同时又按已知的运动规律绕其摆动中心摆动,凸轮按推程、回程角均为180°等速规律运动。理论廓线方程为:

式中:a为中心距;l为摆杆长度;φ为推程角;δ为推程运动角。
实际轮廓线为理论轮廓法线方向的等距线。
凸轮推程的运动方程为:

式中:s为位移;v为速度;h为推程;ω为角速度。
凸轮回程运动方程为:

根据运动规律和有关条件确定凸轮的轮廓曲线,凸轮参数计算结果见表2。

表2 凸轮设计结果
2.3 齿形带设计
齿形带用于啮合传动,带和带轮之间没有相对弹性滑动[3],它与 V 带、平带相比具有以下优点:(1)传动准确;(2)传动效率高;(3)速比范围大;(4)传递功率范围大;(5)结构紧凑。
具体设计如下:
(1)确定同步带传动的设计功率Pd:

根据设计手册,取载荷修正系数KA=1.7,所以设计功率为:
Pd=KAPd=1.7×0.003 5=0.005 95 (kW)
(2)确定带的型号和节距。根据同步带传动的设计功率Pd和小带轮转速n1,由同步带选型图确定采用带的型号和节距。由于电动机的转速很低,选用特轻的XL型号即可。查手册可得XL型号齿形带的其余参数:节距Pb=5.080 mm,基准宽度为9.5 mm。
(3)选择小带轮齿数。同步带传动中带轮的最少许用齿数与带轮转速和带轮齿节距有关。这可根据同步带的弯曲疲劳寿命来分析。带轮转速越高,则带在单位时间内绕过带轮的次数越多,因此在很低转速条件下工作时,可采用齿数较少的带轮。故取小带轮的齿数z1=25。选定小带轮齿数后,即可确定大带轮的齿数z2=i0z1=72。
(4)确定带轮的节圆直径。在同步带传动的节距和带轮齿数确定后,就可根据公式求出小带轮的直径和大带轮的直径:

(5)确定同步带的节线长度 Lp:

3 机构实现
本文所设计的全自动太阳跟踪装置,主要由减速机构、执行机构、驱动电机、跟踪机构、连接机构以及安装支撑架组成,如图2所示。
其中驱动电机固定在第一支撑架上,太阳轨迹的跟踪是由控制机构中控制电机的转动来实现的。固定在第一支撑架上的一级减速的第一减速器、固定在第二支撑架上的二级减速的第二减速器、带轮和第一齿轮、第二齿轮构成减速机构,一级减速的小带轮与固定在第一支撑架上驱动电机的输出轴连接,大带轮与二级减速器的轴连接,其输出轴的一端与第一凸轮相连接,另一端与三级减速的小齿轮连接,与小齿轮啮合的大齿轮与四级减速的第一减速器连接,第一减速器固定在驱动电机下部的第三支撑架上,其输出轴与第二凸轮连接,第一凸轮与第二齿轮的支臂触接,并与第四支撑架和第五支撑架支撑的第二连接构件上的齿轮啮合,第二凸轮与第一连接构件触接,第二连接构件和第一连接构件合成运动由相应的跟踪机构连接来执行,从而实现太阳运行轨迹的跟踪。
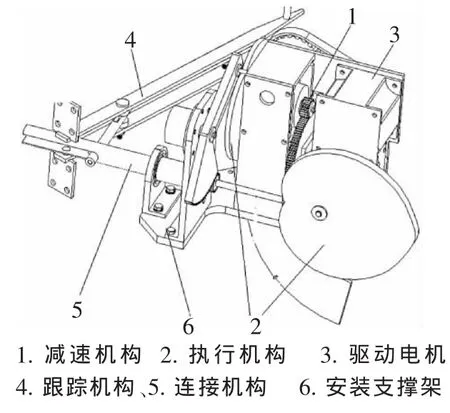
▲图2 太阳跟踪装置系统图
4 结论
该跟踪装置利用凸轮实现太阳的轨迹跟踪运动,其结构简单,运动平稳,能按要求停止在任意位置上,水平转动范围为 0~360°, 垂直转动范围为-15~100°,可根据不同需求,实现全天候、全自动观测,真正实现了对太阳的全天候跟踪,可大大提高太阳能的利用率。在支撑架的下方安装纬度刻度板,可根据任何地点的纬度,结合当地时间进行太阳跟踪。日落后执行机构可按照与实际跟踪轨迹相反的方向返回初始位置,避免了机构的卡死,而且系统不是连续单方向运行,而是往复运动,避免控制电缆和仪器信号线的缠绕。
[1] 吕文华.全自动太阳跟踪器的研制和应用[J].光学精密工程,2008,16(12):2544-2549.
[2] 卢育发,李旗号,李倩.双轴跟踪装置对太阳能发电系统增效的理论研究 [J].安徽电子信息学院学报,2009(5):43-46.
[3] 倪森寿.机械基础[M].北京:高等教育出版社,2000.
[4] 詹友刚.Pro/Engineer中文野火版高级应用教程[M].北京:机械工业出版社,2011.
[5] 中国气象局.气象辐射观测方法[M].北京:气象出版社,1996.
