基于TMS320LF2407A芯片的SRM过流过压保护
2013-04-15聂平由
聂平由
(湖南工业职业技术学院,湖南 长沙,410208)
前言
电机作为一种机械能与电能的能量转换设备,在工业化的各个领域中都起到了非常重要的作用,开关磁阻电机(Switched Reluctance Motor,即SRM)作为一种新型的调速设备,具有结构简单、控制灵活、可靠性高、控制精度高等优点。随着电力电子技术与仿真技术的高速发展,DSP与ARM高性能微处理器得以广泛应用,形成了SRM应用的新平台,很大程度上推动了开关磁阻电机调速系统(Switched Reluctance Diver,即SRD)的应用,使之发展成当今电机领域的热门课题,并广泛应用于军事、商业和工业设备中。与此同时,尤为迫切的问题也凸显出来,那就是关于开关磁阻电机的保护,本文采用了基于TMS320LF2407A芯片的DSP控制技术,主要研究了SRM过电流与过电压的监测与保护。
1 TMS320LF2407A芯片概述
在设计SRM的控制器时,本文选择了芯片TMS320F2407A作为控制中心。该芯片是美国TI公司生产的的微处理器,它融合了DSP的高速运算能力和高效控制能力,使数字控制技术发挥到很高的水平,实现了高可靠性与优良控制性能。该芯片结构简单、性能高,广泛应用于电机的数字控制、工业自动化、电力系统的信号转换等,处理能力达到40MIPS,远胜于传统的8位微控制器和16位微处理器的性能。
TMS320LF2407A的主要特点如下[1-2]:
(1)、采用高性能静态CMOS技术,使其供电电压低至3.3V,减小了控制器的功耗;40MIPS的执行速度使指令周期缩短到25ns(40MHz),从而提高了控制器的实时控制能力。
(2)、片内有高达32k的FLASH程序存储器,高达1.5k的数据/程序RAM,544的双口RAM(DARAM)和2k的单口RAM(SARAM)。
(3)、两个事件管理器模块EVA和EVB,它们都有:两个16位通用定时器与八个16位的脉宽调制(PWM)信道(当外部引脚PDPINTx出现低电平时快速关闭PWM通道);可编程的PWM死区控制以防止上下桥臂同时输出触发脉冲;3个捕获单元;片内光电编码器接口电路;16通道A/D转换器。
(4)、可扩展的外部存储器高达192K空间:64K的程序存储器空间;64K的数据存储器空间;64K的I/O寻址空间。
(5)、看门狗定时器模块(WDT)。
(6)、10位A/D转换器(最小转换时间为500ns),可由两个事件管理器来触发两个8通道输入的A/D转换器或一个16通道输入的A/D转换器。
(7)、控制器局域网络(CAN)2.0模块。
(8)、串行通信接口(SCI)模块。
(9)、16位的串行外设(SPI)接口模块。
(10)、基于锁相环的时钟发生器。
(11)、高达40个可单独编程或复用的通用输入/输出引脚(GPIO)。
(12)、5个外部中断(两个电机驱动保护、复位和两个可屏蔽中断)。
(13)、电源管理包括3种低功耗模式,能独立将外设器件转入低功耗工作模式。
TI公司的TPS73xx系列是TI公司为配合DSP而制作的电源转换芯片,接口电路简单,只需接上必要的外围电阻,即可实现电源转换。TPS7333是一种固定输出3.3V电压的电源转换芯片,其中是欠压低电平输出端,采用漏极开路的工作方式。当负载突变或其它故障导致OUT的输出出现欠压时,则输出低电平,并保持200ms。当OUT的输出恢复正常时,在200ms后,则恢复输出高电平。电路如图1所示:
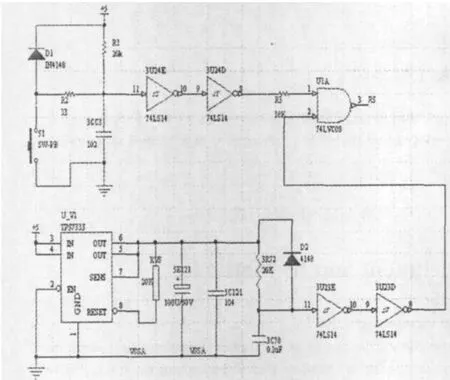
图1 DSP 电源及复位电路
TMS320DSP芯片引脚是复位信号输入端,当该引脚为低电平时,则芯片复位。为保证芯片的正常初始化,一般需保持引脚至少持续3个CLKOUT周期的低电平。为了避开振荡器起振时的非线性特性对整个系统的影响,复位电路维持低电平的时间必须大于系统晶体振荡器的起振时间。一般地,晶振需要100-200ms的稳定时间,因此上电复位时间应大于200ms。对于复位电路来说,首先应确保复位低电平时间足够长,使DSP实现可靠性复位;然后应确保有良好的稳定性,避免DSP出现误复位。
为了实现控制的灵活性,本控制器采用了上电复位电路和人工复位电路,当系统运行出现故障时可灵活地实现人工复位。图1中,出现掉电时,二极管D1为电容提供放电途径,使电容快速放电完毕,即可确保在反复上电时实现可靠性复位。另外,斯密特触发反相器进行整形处理,提高了系统的抗干扰性,并确保低电平的维持时间。
3、绕组电流检测电路
本控制器采用在主回路串接一个0.025Ω/5W的水泥电阻来检测绕组的电流,并通过信号处理送入DSP芯片进行A/D转换。绕组电流检测电路如图2所示:
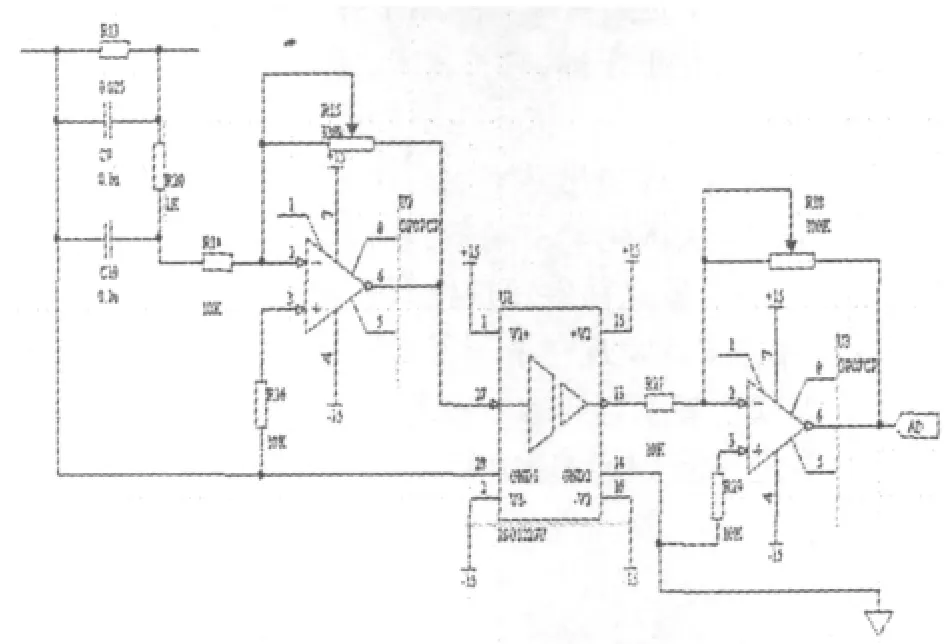
图2 电流检测电路
4、过流检测与保护
磁阻电机出现过电流现象的原因如下[3]:
(1)负载的冲击,或者堵转现象的突然产生,导致电机的电流突然增加而出现过电流;
(2)系统的输出部分出现短路,比如输出端到电机之间的连线出现短路,或者电机内部线圈出现短路等,导致电机出现过电流;
(3)电机在加速运行时,当拖动负载的机械惯性较大,而加速时间却设定过小时,会产生过电流;
(4)电机在减速运行时,当拖动负载的机械惯性较大,而减速时间却设定过小时,也会产生过电流。
为了避免磁阻电机出现过电流而受损,本控制器采用了过流保护电路,大大地提高系统的可靠性。
本控制器采用比较器LM741实现过流检测。LM741的同相输入端为电流检测电路的输出电平,反相输入端为电流的限幅值。过流保护电路如图3所示:
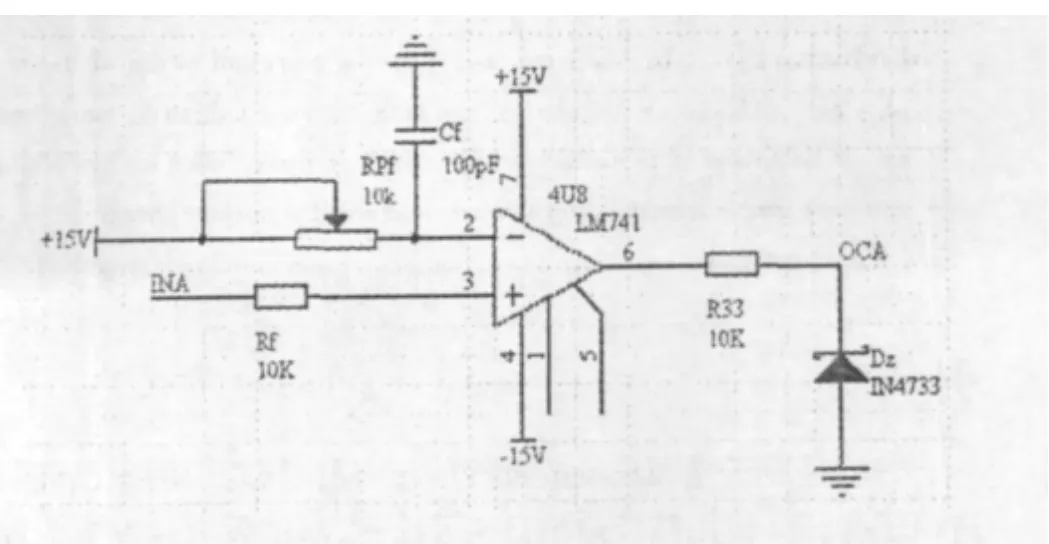
图3 过流保护电路
正常工作时,LM741的同相输入端的电平低于反相输入端的电平,LM741输出为OV,当电流超过设定的保护值时,LM741的同相输入端的电平高于反相输入端的电平,LM741输出约为12.5V,经稳压管IN4733稳压为3.3V,与过压保护电路输出经或非处理,进入DSP的功率保护输入引脚PDPNITA,以便作出相应的处理,实现实时的过流保护。
5、过压检测与保护
磁阻电机出现过电压现象的原因如下:
(1)电源过电压。电源电压的上限,一般不会超过给定输入的10%,可是由于电网波动,有时会出现电源电压过高的现象,这使整流后的直流电压跟随上升,导致电机出现过电压;
(2)再生制动过电压。当负载机械惯性较大,而系统设定的频率下降却较快,在再生制动时,其回馈能量通过制动电阻和制动单元的突然释放,从而导致直流电路的过电压;
(3)脉冲过电压。由于电路中存在线圈电感和线路分布电感,在每个脉冲的上升和下降过程中,会产生较大的脉冲过电压。
过压保护电路跟过流保护电路相似,如图4所示:
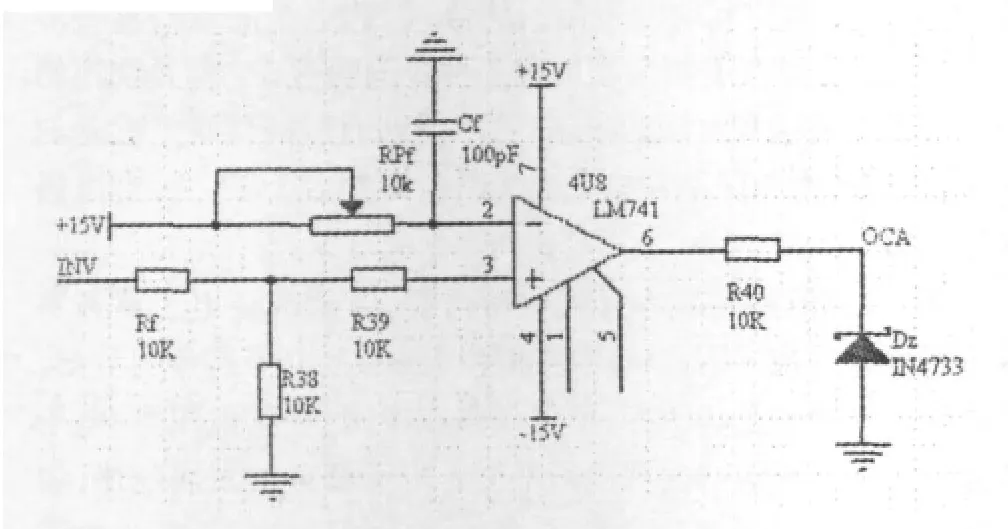
图4 过压保护电路
结 语
从以上的介绍中可以看到,本文主要探讨了磁阻电机的过流与过压保护。在设计其控制器时,选用了美国TI公司的TMS320F2407A芯片,并且采用了DSP的先进性控制技术,实现了SRM过电流与过电压的有效检测与保护。
[1] 刘和平等.TMS320LF240x DSPC语言开发应用[M] .北京:北京航空航天大学出版社,2003.
[2] 张毅刚等.TMS320LF240x系列DSP原理、开发与应用[M] .哈尔滨:哈尔滨工业大学出版社,2006.
[3] 王晓明,王玲.电动机的DSP控制-TI公司DSP应用[M] .北京:北京航空航天大学出版社,2004.
