一种阴影消除算法优化及DSP实现
2013-04-12祝宇鸿陈贺新
祝宇鸿,陈贺新,张 燕
(吉林大学通信工程学院,长春130012)
近年来,许多学者在移动侦测阴影消除算法方面进行了大量研究,文献[1]采用基于梯度分析消除阴影,算法简单但阴影消除效果一般。文献[2]在彩色空间模型下进行的阴影检测和消除,通用性强且结果较精确;但参数较多,需在不同场景修正,灵活适应性差。文献[3]和文献[4]通过模型精确地计算出阴影的形状和位置,算法比较复杂且计算量大。文献[5]和文献[6]均采用Sobel算子进行梯度分析的方法去除运动目标的阴影,其复杂度较高。文献[7]提出了一种新的双矩形框算法,在彩色空间模型下提取运动目标时,能够较好地去除光照变化阴影影响。
本文优化了基于空间的双矩形框算法流程,使用自制的DM642多媒体DSP硬件系统实现了算法。实验结果证明,优化后的算法能够很好地去除阴影,实现了运动目标的精确提取。
1 原移动侦测算法
1.1 算法流程
移动侦测算法主要包括视频图像预处理,初步确定目标的运动区域,阴影消除、进一步精确目标的运动区域,目标提取,光照干扰影响消除,背景更新等。算法流程如图1所示。
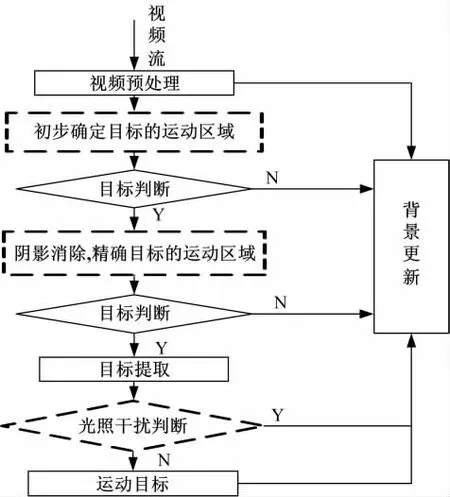
图1 移动侦测算法流程图Fig.1 M otion detection algorithm flow chart
1.2 预处理
图1中视频预处理包括利用灰度统计平均法提取初始背景图像,对读入的视频使用维纳滤波进行高斯白噪声的滤除,将输入视频图像转化为HSV格式。
1.3 外接矩形框算法
因为三帧差分法存在孔洞和双影的问题,研究了一种使用两次矩形框计算标定运动目标的算法[5],称为“双矩形框法”。设当前帧为fk(x,y),每隔 n帧取一幅图像,图像大小为 M×N,fk-n(x,y)和fk+n(x,y)分别表示视频流前次采样帧和下次采样帧。算法步骤如下。
(1)计算fk-n(x,y)和fk(x,y)的二值差分图像dk-n(x,y)。dk-n(x,y)中所有值为1的像素点的集合记为B1。

集合B1中x的最小值标记为x1min,最大值标记为x1max,用公式表示如下:

同理,得到y1min和y1max。

在dk-n(x,y)中,以(x1min,y1min)和(x1max,y1max)为对角顶点的矩形即为dk-n(x,y)的外接矩形框。
(2)计算fk(x,y)和fk+n(x,y)的二值差分图像dk+n(x,y),同理可得B2。

同理得到x2min,x2max,y2min和y2max:

在dk+n(x,y)中,以(x2min,y2min)和(x2max,y2max)为对角顶点的矩形即为dk+n(x,y)的第2个外接矩形框。
(3)令

以(xmin,ymin)和(xmax,ymax)为对角顶点的矩形即为所求矩形框。
1.4 运动区域初步确定
此步骤使用了帧间差分算法、双矩形框算法和阈值分割算法。
阈值分割算法采用将Otsu阈值分割算法与单峰直方图法相结合的方法。
运动区域初步确定步骤为,在HSV彩色模型下,计算V分量的相邻视频帧帧差,然后双矩形框算法初步确定目标的运动区域,得到矩形框。依据得到的矩形框,判断当前帧视频帧中是否有运动目标。若无,则执行步背景更新步骤。
1.5 阴影消除精确目标运动区域
设背景图像为fb(x,y),当前帧图像为fc(x,y),则背景差分视频帧为:

其中,T1为二值化阈值,取值为1和0的像素分别对应于前景和背景。
计算S分量的背景视频帧帧差,并采用一般矩形框法计算其外接矩形。由于S分量不受阴影效应影响,由此得到的矩形框可进一步缩小目标区域,即将阴影部分去除。由得到的矩形框再次判断当前帧图像是否有运动目标出现。若无,则执行背景更新步骤。
1.6 目标提取
在精确的目标运动区域内,分别计算H、S和V分量的背景差分图像,设为Hob、Sob和Vob,然后按照公式(8)将三者进行“相或”运算,提取运动目标的完整信息HSVob。

1.7 光照干扰消除和背景更新
用HSVob的像素点数占整幅图像总像素点数的百分比判断是否有光照影响。若无光照突变,则HSVob是当前帧检测到的运动目标;否则,舍弃当前帧,继续检测。
利用Surendra[8]背景更新算法对背景图像进行更新。
2 优化的移动侦测算法
2.1 原算法可优化的步骤
在原来的算法中每个视频帧都需要进行初步运动区域判断,连同阴影消除步骤要使用两次双矩形框算法,且运动区域初步确定与阴影消除精确目标运动区域均在彩色模型下运算,计算步骤有冗余,可以进行算法优化。
2.2 优化的算法流程
优化算法是先进行运动判断,若检测到无运动则不进行运动区域判断;若检测到运动,进行阴影消除步骤,此处是在彩色模型下,利用V分量视频帧帧差和S分量背景视频帧帧差,在V分量仅使用帧间差分法进行运动目标初步判断,而在S分量使用双矩形框算法进行运动目标精确判断,进行光照干扰消除后,进行目标提取。优化后的算法流程图如图2所示。
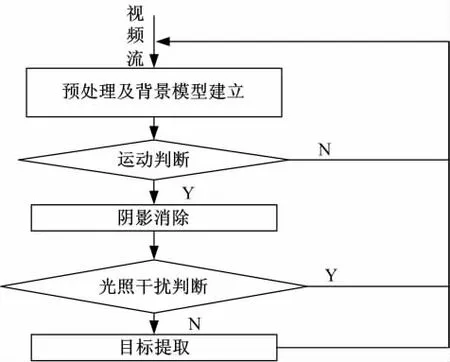
图2 优化的算法流程图Fig.1 Optim ized algorithm flow chart
优化后的算法流程对于运动视频帧,节省了一次双矩形框计算,且运动区域初步确定和精确确定阴影消除同时操作,因为均在HSV运算域针对V和S分量操作,在程序实现时简化了运算步骤。
3 算法的DSP实现
3.1 DSP视频帧捕获
DSP使用的是自制的TMS320DM642[9]视频板,其板上资源有PAL编码器、PAL解码器、DM642 DSP处理器及其外配SDRAM和FLASH等。
因为PAL解码器送入DM642视频数据是BT.656的格式,Y、Cb、Cr三个分量按4∶2∶2的频率进行采样,DSP实现需做Y、Cb、Cr彩色空间到HSV彩色空间的变换。且PAL解码器的输出为按场模式,而算法是采用帧处理的方式,因此DSP在视频捕获模式中配置为帧模式。
为了减小运算量,视频输入设为CIF格式,每个视频帧的大小为320×240,这样在HSV彩色空间,每帧就有3×320×240个像素点需要处理。
3.2 DSP算法实现
编写了滤波、彩色空间变换、背景更新、双矩形框算法等函数,在程序中合理定义变量的类型。为了调试方便,使用了RTDX技术。为了使程序可靠,合理使用了const、restrict和volatile关键字;为优化程序运行速度,使用内联函数实现滤波、色彩空间变换、双矩形框等算法;使用软件流水技术实现指令的并行执行,从而提高代码的执行效率。把频繁使用的数据储于L2 RAM空间的存储区中。在DM642 DSP上编程实现了图2中的算法流程。
4 实验结果
经过优化后的算法使用DSP实现后,用一室外视频流进行实验,得到测试视频帧及提取运动目标的图像如图3所示。

图3 移动侦测算法实验结果Fig.3 Experimental result ofmotion detection algorithm
图3中,上面为视频帧,下面为移动目标提取的结果,通过实验结果可以看出,实现的算法能够有效去除阴影,较为完整得提取运动目标。
通过实验证明,该算法不仅适用于室外环境,对室内灯光造成的阴影同样具有很好的消除性能,实验结果不再贴出。
5 结束语
研究了基于彩色空间模型的双矩形框阴影消除算法的流程,对其进行优化,减少了计算量,通过设置DSP的视频帧的捕获及DSP程序的优化,在TMS320DM642中实现了该优化算法。实验结果表明,该算法能够较好地去除阴影,实现了运动目标的精确提取。
因为目前使用的是C语言代码实现的,没有使用DSP线性汇编进一步优化,视频使用的是CIF格式,有待下一步工作继续完善。
[1]Zhao T,Nevatia R.Tracking multiple humans in complex situations[J].IEEE Trans Pattern Analysis and Machine Intelligence,2004,26(9):1208-1221.
[2]Rafael C Gonzalez,Richard E Woods.Didital image proccessing using MATLAB[M].Beijing:Publish House of Electronics Industry,2009.
[3]Cucchiara R,Crana C,Piccardi M,et al.Improving shadow suppression in moving object detection with HSV color information[C]//The Proc of IEEE International Conference on Intelligent Transportation Systems. Oakland(CA),USA,2001:334-339.
[4]Kilger M.A shadow handler in a video-based real-time trafficmonitoring system[C]//The Proc of IEEEWorkshop on Applications of Computer Vision.Palm Springs,CA,1992:11-18.
[5]林坤杰,万晓东.基于边缘信息及光照方向的阴影检测算法[J].计算机工程,2009,35(20):192-196.
LIN Kun-jie,WAN Xiao-dong.Shadow detection algorithm based on edge information and illumination direction[J].Computer Engineering,2009,35(20):192-196.
[6]刘雪,常发亮,王华杰.运动目标检测中的阴影去除方法[J].微处理机,2008(5):116-117.
LIU Xue,CHANG Fa-liang,WANG Hua-jie.An shadow suppressionmethod in detectingmoving object[J].Microprocessors,2008(5):116-117.
[7]张燕.移动侦测的抗干扰算法研究[D].长春:吉林大学,2011.
Zhang Yan.Research on anti-interference algorithm of motion detection[D].Changchun:Jilin University,2011.
[8]Surendra Gupte,Osama Masoud,Robert F K Martin,et al.Papanikolopoulos,detetion and classification of vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(1):37-47.
[9] Ti,Inc.TMS320DM642 Video/Imaging Fixed-Point Digital Signal Processor(Rev.D)[EB/OL].(2010-10-19).http://www.ti.com/product/sm320dm642-ep.
