CAN 现场总线在液压挖掘机状态监测系统中的应用
2013-04-09王学慧于达
王学慧,于达
(解放军理工大学 工程兵工程学院,江苏 南京 210007)
0 引言
传统的液压监测系统主要采取DCS(分散控制系统),它仍需要一个中央计算机来集中地实现控制,采用的电缆比较多,而CAN 总线,既是一个开放通信网络,又是一种全分布控制系统,它的出现得到了迅速的推广,为此,在研究中引入现场总线技术。本文设计基于CAN 现场总线的液压挖掘机状态监测系统,能够实时监测机器运行状态、并显示输出其状态参数,通过对状态参数的相关数据进行自动分析、诊断,进而预报故障,查明原因并及时掌握故障发展的趋势。
1 液压挖掘机状态监测系统要求
监测系统是通过安装在机器各个部位的传感器,不断监测主要工作部件的工作状态,并判断状态参数是否正常,在超过规定值时,发出声,光报警等信号,提醒操作人员注意或采取相应措施。因此需综合考虑多种因素,合理规划,下面给出一个实用的液压挖掘机状态监测系统应具备的主要功能是:
1)系统必须明确运行即时状态,发动机转速、机油压力、液压油温等。
2)系统必须在尽可能早的时间对故障或失效进行报警并提示故障原因和发生故障的部位,确保运转可靠。
3)系统必须能表达故障与传感器信号间的复杂关系。
4)系统必须具备多传感器信息融合的能力,将来自不同的传感器组、人工输入等信息融合成一个综合的诊断决策。
5)系统必须考虑液压挖掘机恶劣的工作环境对元件故障或失效的影响。
6)系统所需的传感器数量应最少。
7)系统必须提供一个良好的人机交互式界面,方便用户操作和输入从其他传感器得到的信息,并考虑较高的性能价格比。
8)系统的计算量不能太大,可以适时地进行检测和报警。
9)系统必须具备故障预测和趋势分析的功能。
2 国内外基于现场总线液压挖掘机监测系统研究概况
2.1 国外研究现状
国外的液压挖掘机较早的采用电子监测技术。例如德国公司开发的BORD 电子监测系统,能监测与液压挖掘机作业过程和维修有关的全部重要参数。它利用微处理器检查挖掘机作业数据、快速监测、评估和显示所计算的数据,可识别发生故障和超出极限值的趋势,在重大事故前显示报警信息。德国的博世-立士乐公司研制带CAN总线接口的高性能阀和泵,现场总线接口是采用CAN bus,可以实现泵与阀与上位计算机以及其他智能单元的通信。传感器制造商也对CAN 总线产生了极大兴趣,MTE 公司推出带CAN 总线接口的四通道数据采集系统,每通道采样频率为16 MHz,可存储2 MB 数据。A/D 转换器为14 位,通过CAN 总线可将采样通道扩展到256 个,并可与带有CAN 总线接口的PC 机进行数据交换。
2.2 国内研究现状
国内研究液压挖掘机的状态监测与故障诊断系统方面起步较晚。上海建筑机械厂和上海同济大学联合开发研制了电子监控装置,主要是对液压挖掘机的发动机和发生故障频率比较高的系统进行监测,对运行中的十二项参数进行监测,并以液晶屏幕显示监测结果,对异常情况可进行简单的故障诊断。
3 现场总线特点
3.1 现场总线
现场总线应当是应用在生产最底层的一种总线型拓扑的网络,它作为智能设备的联系纽带,把挂接在总线上、作为网络节点的智能设备连接为网络系统,并进一步构成自动化系统,实现基本控制、补偿计算、参数修改、报警、显示、监控、优化及控管一体化的综合自动化功能。这是一项集嵌入式系统、控制、计算机、数字通信、网络为一体化的综合技术。
从20 世纪80 年代现场总线技术才开始形成和发展,在十几年的时间中,已经出现了好几种现场总线技术走向成熟,如FF(基金现场总线),Lon Works,PROFIBUS,CAN等,下面以CAN 为例,说明一下现场总线的特点及其在液压挖掘机监测系统中的适应性。
3.2 CAN 总线介绍
CAN 总线(controller area network)即控制器局域网,是国际上应用最广泛的现场总线之一。起先,CAN 总线被设计作为汽车环境中的微控制器通讯,在车载电子控制装置ECU 之间交换信息,形成汽车电子控制网络。
CAN 总线是一种多主方式的串行通讯总线,,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10 km 时,CAN 总线仍可提供高达5 kbit/s 的数据传输速率。由于CAN 串行通讯总线具有这些特性,它很自然地在汽车、制造业以及航空工业中受到广泛应用。
作为一种技术先进、可靠性高、功能完善、成本合理的远程网络通讯控制方式,CAN 总线已被广泛应用到各个自动化控制系统中。从高速的网络到低价位的多路接线都可以使用CAN 总线。例如,在汽车电子、自动控制、智能大厦、电力系统、安防监控等各领域,CAN 总线都具有不可比拟的优越性。
3.3 CAN 总线主要特征
1)CAN 是目前为止唯一有国际标准的现场总线。
2)CAN 采用非破坏总线仲裁技术,即使在网络负载很重的情况下,也不会网络瘫痪,极高的总线利用率。
3)CAN 的直接通信距离最远可达10 km(速率在5 kbit/s以下);通信速率最高可达1 kbit/s(此时通信距离最长为40 km)。
4)CAN 节点在错误严重的情况下具有自动关闭输出的功能,以使总线上其他节点的操作不受影响。
5)CAN 总线具有较高的性价比,结构简单,器件容易购置,每个节点的价格较低,而且开发技术容易握,能充分利用现有的单片机开发工具。
由以上分析可以看到CAN 特别适合于挖掘机的状态监测,为此在液压挖掘机状态监测系统中采用了CAN 总线。
4 基于CAN 现场总线的液压挖掘机状监测系统的实现
4.1 系统总体构成
液压挖掘机状态监测系统硬件由微控制器、传感器,信号调理电路、CAN 通信和警报系统组成,如图1 所示。为了克服机械仪表精度差、稳定性不高、发热量大、耗电大等缺点,系统中采用了稳定性能良好的液晶显示屏。不同类型的传感器在液压挖掘机各部位上采集运行状态信号。一般来自传感器的信号主要是模拟信号,经过信号调理电路对信号进行滤波,放大处理之后,送入具有A/D 转换功能的温控制器单元的I/O 口。微控制器把采集的信号一方面控制液晶显示屏显示各种信息,另一方面,通过微控制器的SPI 将采集的数据传递给CAN 控制器MCP2515,数据经CAN 总线传输到上位机,用以实时监测液压挖掘机的各个工作状态参数。
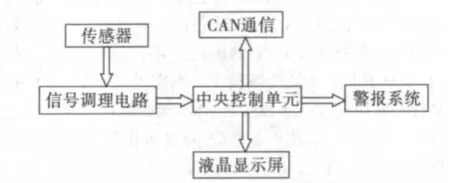
图1 液压挖掘机状态监测系统结构图
4.2 关键硬件设计
a)微控制器的选择
本文所述是以三星公司推出的S3C2440A 芯片为中央控制单元。它是面向高端手持设备或一般应用而设计的芯片。采用ARM920T 内核,具有低功耗、高速的处理计算功能等特点。其片内集成了通用I/O 端口,有24 个外部中断端口和多功能输入/输出端口;RTC 中包含全面的时钟特性,秒、分、时、日期,具有报警中断和节拍中断;16位看门狗定时器,在定时器溢出时发生中断请求或系统复位;支持三种类型的STN LED 显示屏和不同尺寸的液晶屏,并兼容2 通道的SPI 协议2.11 版。
b)CAN 通信
CAN 总线种种优点上文已经详细的介绍,本文采用了Microchip 公司的MCP2515 是一款独立CAN 协议控制器,完全支持CAN V2.0B 技术规范。该器件能发送与接收标准和扩展数据帧以及远程帧。MCP2515 自带的2 个验收屏蔽寄存器和6 个验收滤波寄存器可以滤掉不想要的报文。它还包括3 个发送缓冲器和2 个接收缓冲器,减少了主芯片负担。MCP2515 与S3C2440A 的连接时通过业界标准串行外设接口SPI 实现的。CAN 总线收发器TJA1050 是Philips 公司生产的高速CAN 总线收发器。该器件提供了CAN 控制器与物理总线之间的接口以及对CAN 总线的差动发送和接功能。它具有的主要特性,最高速率可达1 kbit/s,具有强电磁干扰,总线及电源及地之间的短路保护等等。
c)传感器的选择
液压挖掘机需要实时监测的数据很多,所以在液压挖掘机上安装很多类型的传感器,有温度传感器(水温和油温)、压力传感器、转速传感器和角度传感器等。以下以温度传感器为例,进行说明。程序实现的部分代码,实现不停循环监测温度值,通过串口传出来,如下。
实现精确延时函数,代码如下:
4.3 软件开发
本系统中的软件开发采用VB6.0。它采用了一种高级的出错处理技术并且提供了种类多样的控件,非常适合开发液压挖掘机状态监测系统。VB 主要完成了各芯片的状态控制与管理,各芯片之间的数据通信。系统的软件主要包括以下几个模块:监控模块,这是最重要的模块,主要功能既是实时的进行数据采集,控制计算与数据处理、优化控制、报警控制、运行参数的显示画面、参数修改等。维护模块,监测系统软硬件的运行状态,提示系统是否需要维修,进行简单的诊断。数据管理模块,进行一系列的文件管理,数据库管理和存取历史记录。
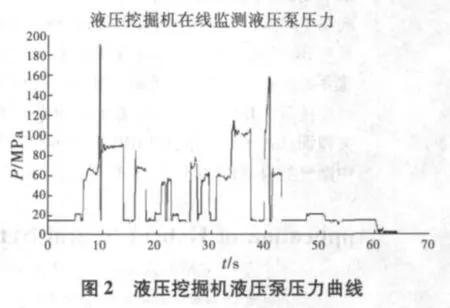
5 液压挖掘机在线监测系统测试及结果
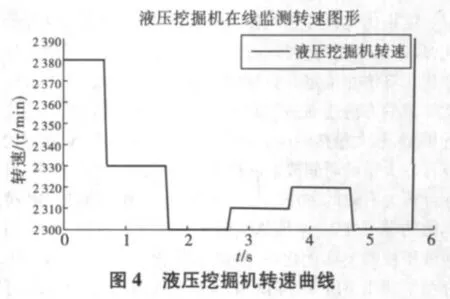
系统能实时的记录多个传感器所收集的记录,以图形或者是矩阵的形式表现出来。
图2,3,4 是液压挖掘机作业时各个参数显示曲线。

6 结论
系统采用了高性能的嵌入式系统,其具有丰富的片内资源,使外围设备得到了最简化,体积小,功能大。并且与快速发展的CAN 现场总线技术相结合,实现了对液压挖掘机状态监测。本系统对机器运行状态、并显示输出其状态参数,通过对状态参数的相关数据进行自动分析、诊断,进而预报故障苗头,最终实现减少对挖掘机进行拆卸,大大缩短其故障停机时间,同时还能改善作业条件,提高作业效率和经济效益具有重要意义。
[1]潘伟,王汉功.工程机械液压系统在线状态监测[J].工程机械与维修,2004,(06):125-127.
[2]何福忠,高宇.液压挖掘机的工况监测与故障诊断[J].工程机械与维修,1996,(01):27.
[3]李伟波,李伟,等.CEBUS 现场总线在液压阀状态监测系统中的应用[J].机床与液压,2002,(1):8-9.
[4]王满意,丁恩杰,等.基于现场总线的工作面液压支架监控系统的研究[J].煤矿机械,2009,30(09):229-231.
[5]饶运涛.现场总线CAN 原理与应用技术[M].2 版.北京:北京航空航天大学出版社,2007.
[6]谢喜春.液压挖掘机监测系统的设计与研究[D].长沙:中南大学,2006.
