复杂静态背景下多移动目标实时检测系统的FPGA实现
2013-04-03陈大伟刘海龙李金屏
陈大伟,刘海龙,李金屏
(1.济南大学信息科学与工程学院,济南250022;2.山东省网络环境智能计算技术重点实验室,济南250022)
随着人类安防意识的提高,智能视频监控系统在越来越多的领域中得到广泛的应用。例如智能小区监控系统、交通事故检测系统、无人车间以和人包分离监控系统等。在视频监控中,目标检测是技术的关键。因此实现多移动目标的快速、准确实时检测具有十分重要的研究意义[1-2]。
传统上视频监控技术算法都是在PC机上实现,视频监控系统成本较高,不便于携带灵活性差。随着FPGA(Filed Programmable Gate Array)的出现,其丰富的逻辑资源和高速运算能力[3],特别适合视频图像处理的要求,使利用FPGA进行视频图像处理逐步成为发展趋势[4-5]。
近年来,国内外很多专家和学者对利用FPGA进行视频图像处理提出了许多见解和方法。Hiroaki等[1]通过将光流法和立体视觉结合起来,实现了多移动目标的检测和测距;Fatih[2]采用单一摄像头,实现了移动目标的实时检测和跟踪。在国内有像素漂移算法[6]、三维距离函数测距算法等,这些算法有望在FPGA上实现,便于视频监控系统向着产品化和智能化方向发展。
笔者设计出一种基于FPGA的复杂静态背景下多移动目标的实时检测系统。其创新点在于使用多重去噪技术获得了良好的检测效果。系统低成本、低功耗,便于安装维护,可作为智能监控系统广泛适用于小区和交通路口[7]、银行和博物馆,以及工厂的无人车间等场所中,具有很高的实用价值。
1 系统硬件设计方案与实现
1.1 系统硬件设计方案
系统硬件设计方案在采用FPGA芯片上实现,包括视频采集、视频格式转换等6个部分[6]。系统硬件结构框图如下图1所示。

图1 系统硬件设计结构框图Fig.1 Block diagram of system hardware design
1.2 系统硬件方案实现
系统采用CMOSWV_CP240模拟摄像头,录入PAL(Phase Alternative Line)制式模拟视频。系统硬件方案的实现如图2所示。
系统采用的 FPGA芯片为 Altera公司CycloneII系列EP2C70F896C6N。录入的模拟视频经过ADV7180进行解码,解码后的数字视频送入FPGA进行处理,处理结果通过ADV7123转换为模拟视频流,送入显示器实时显示。检测到移动目标的同时,系统驱动扬声器发出警报。

图2 系统硬件实现结构图Fig.2 Structure diagram of system hardware realization
2 系统软件设计方案与实现
2.1 系统软件设计方案
系统软件设计方案各算法均采用 Verilog HDL硬件描述语言[8]设计实现。算法示意图如图3所示。

图3 算法示意图Fig.3 diagram of system algorithm
2.2 系统软件方案实现
系统从SDRAM2中分别读入RGB格式的当前帧和背景帧图像。首先将图像灰度化,再用中值滤波算法滤除摄像头在采集视频时所引入的噪声。
初步去噪后的灰度视频图像及原始图像R分量同时送入背景差分模块中进行差分并取绝对值。差分结果若大于系统阈值T,则认为检测场景中有移动目标出现;反之则认为没有移动目标出现。
检测出移动目标后,系统有3种后续处理方案:1)对比移动目标经过腐蚀膨胀和像素漂移算法处理前后的效果;2)加入Sobel边缘检测算法再次进行对比;3)检测到移动目标,系统警报。每种方案都有相应的功能开关进行控制。
针对系统初始得到的移动目标并不十分充盈,且含有较多的噪声点的情况,特引入数学形态学[6]中的腐蚀、膨胀算法和像素漂移算法。腐蚀膨胀算法既消除了图像部分噪声点,又保持了检测目标的完整性。像素漂移算法对检测到的目标进行再次去噪,进一步消除图像中一些孤立的噪声点,经过多种算法去噪,获得了良好的效果。
3 像素漂移算法
像素漂移是指因为摄像机内部的暗电流或者电子噪声以及外界环境中的空气扰动等原因,引起的某一目标点像素值发生漂移的现象。
现在假设像素漂移现象主要发生在中心像素的8邻域内,像素漂移的示意图如图4所示。
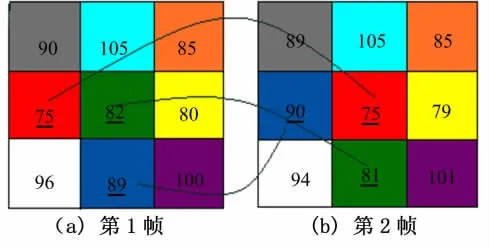
图4 像素漂移示意图Fig.4 Sketch map of pixel shift algorithm
假设从左到右、从上到下分别为8邻域的第1至9个像素,从图4中可看出,3×3矩阵的第4、5、8个像素对应位置的灰度值发生了明显涨落,这属于不正常的像素变化。通过仔细观察,认为这些像素的灰度值与邻近的像素值可在一定程度内发生匹配,认为这种情况发生了像素漂移[8]。
基于以上分析,在系统中设定一个阈值判定是否发生像素漂移。如果发生像素漂移,则按照像素漂移算法对其进行处理,消除这一点因为像素漂移产生的噪声。
4 系统仿真与分析
系统的开发环境为QuartusII9.0,仿真工具为Modelsim 6.5e。背景差分算法仿真结果如图5所示。

图5 移动目标检测算法仿真图Fig.5 The simu lation diagram ofm oving objects detection
为便于观察,图5中均采用无符号整数显示。从图5中可看出,当两个输入值iDATA1、iDATA2差的绝对值大于阈值iTHRESHOLD时,Result的值为0,表示移动目标用黑色标记,报警控制信号Speaker拉低,系统进行报警;反之,Result的值为1023,表示移动目标之外显示为白色,此时Speaker为高电平,扬声器不进行报警。
由此系统实现了检测到移动目标时报警,当摄像头视野内没有移动目标,或者移动目标移出摄像头视野时,停止报警的功能。
5 实验结果与分析
系统的开发平台在Terasic公司的DE2-70开发板上搭建完成。
首先将摄像头固定起来,对准一个静态场景选取一帧完全静止图像作为背景帧图像。实验中使用的开发板和选取的背景帧图像如图6所示。

图6 DE2-70开发板和背景帧图像Fig.6 DE2-70 development board and background image
从当前帧视频流中随机截取3帧图像作为笔者展示的当前帧图像。
为观察腐蚀膨胀和像素漂移算法的处理效果,文章将经过腐蚀膨胀算法和像素漂移算法处理前后的效果展示出来。实验中截取的3帧当前图像,及其处理效果如图7所示。

图7 3帧视频图像的检测效果图Fig.7 Detection results of three video images
在图7中(a)为当前帧图像;(b)、(c)和(d)、(e)分别为经过腐蚀膨胀算法和像素漂移算法处理前后,背景差分的效果图和边缘检测的效果图。
从图7中可看出,在复杂静态背景下,利用背景差分算法能够有效实现多移动目标的实时检测。边缘检测模块能够清晰地提取出的移动目标的轮廓。通过对比,加入腐蚀膨胀和像素漂移算法之后,背景中的噪声基本被消除干净,足以说明,系统具有很强的去噪功能。
6 结论
该系统采用FPGA作为处理器,成本低,运算速度快,每秒可以处理25帧PAL制式视频图像,能够满足智能监控实时性的要求。
笔者在FPGA上使用多重去噪技术使系统获得了良好的检测效果。背景差分前使用中值滤波算法对视频图像进行处理,可在一定程度上滤除摄像头在录入视频时引入的噪声。背景差分后,对检测到的移动目标进行腐蚀、膨胀处理,既有效消除了移动目标周围孤立的噪点,又填充了移动目标中的空洞。系统再采用像素漂移算法,对含有移动目标的二值化图像作进一步去噪处理,消除移动目标以外剩余的噪点,使背景变得更加干净。从实验结果看,经过多重去噪技术后,除移动目标以外,噪声点基本都被消除干净。
另外系统在检测移动目标的基础上,实现了用Sobel边缘检测算子提取移动目标的边缘信息,这是一个很重要的阶段性成果。提取移动目标的边缘,有助于掌握移动目标的轮廓信息,为即将进行的在FPGA上实现目标的分类和识别、目标的预测和跟踪奠定良好的基础。
[1]Hiroaki Niitsuma,Tsutomu Maruyama,Tsutomu Maruyama.Real-time detection of moving objects[J].Field Programm-able Logic and Application-Springer,2004,3203:1155-1157.
[2]Fatih Porikli.Achieving real-time object detection and tracking under extreme conditions[J].Journal of Real-Time Image Processing-Springer,2006,11(1):33-40.
[3]吴继华,王诚.Altera CPLD/FPGA设计[M].北京:人民邮电出版社,2005.
[4]Usman A,Mohammmad B M.hardware/software co-design of a real-time kernel based tracking system[J]. Journal of Systems Architecture,2010,56(8):317-326.
[5]Ayaka Yamamoto,Yoshio Iwai.Real-time object detection with adaptive background model and margined sign correlation[J].Computer Vision-ACCV-Springer,2010 (17):65-74.
[6]李金屏,王磊,张中方.利用FPGA实现视频移动目标的有效检测[J].计算机工程与应用,2010,46 (26):162-165.
Li Jin-ping,Wang Lei,Zhang Zhong-fang.Video detection ofmoving objects using FPGA[J].Computer Engineering and Applications,2010,46(26):162-165.
[7]Jen-Chao Tai,Shung-Tsang Tseng,Ching-Po Lin,et al. Real-time image tracking for automatic traficmonitoring and enforcement applications[J].Image and Vision Computing,2004,22(6):485-501.
[8]夏宇闻.Verilog数字系统设计教程[M].北京:北京航空航天大学出版社,2009.
