基于模糊控制算法的温度控制系统设计
2013-03-30张晓东俞盛恺
鲁 可,张晓东,俞盛恺
(河南工业大学 电气工程学院,河南 郑州 450001)
0 引言
在工业生产中,绝大部分都需要考虑温度的影响,例如钢铁冶炼中的热处理或者塑料生产的定型,都是通过对温度的控制,从而达到产品的生产工艺[1]。在科技的迅速发展之下,自动控制系统应用的领域越来越广泛,同时对系统的稳定性,精确性和响应的速度以及系统自调节能力的要求也越来越高。由于工业生产中的生产过程或者被控对象的非线性和时变性,以及外部因素带来的随机扰动和不确定因素使被控对象模型的建立很难做到精确[2]。
目前,国内各个行业中温度控制系统的主要的成熟产品还是以常规PID温度控制器为主。对于一般的温度系统,PID温度控制器已经能够很好的适应,但是面对一些复杂的、时变性和滞后性强的温度控制需求,传统PID控制器还较难控制。将模糊控制算法应用到温度控制系统中,能够克服温度控制系统中存在的滞后性较强的现象,同时可以提高控制效果和控制精度。本文选择直热式热水锅炉内的温度为被控对象,将模糊控制算法和温度控制结合在一起进行研究,设计出一种基于模糊控制算法的温度控制系统,并将其与传统PID控制进行系统仿真比较,体现出较好的优越性。
1 系统硬件设计
本文系统硬件由外部电源电路,温度检测电路、温度显示电路、单片机最小系统电路、键盘输入电路和温度控制电路组成[3]。外部电源为整个控制系统提供电能;温度检测电路将检测到的温度信号转换成标准的电压信号输入单片机在LED上显示出来;键盘输入电路输入给定的设定量,单片机系统根据输入量和检测量以模糊控制算法为基础求出控制值,固态继电器作为执行器调整温度的高低。硬件原理框图如图1所示。
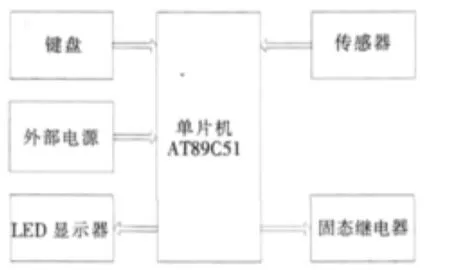
图1 硬件原理框图
2 系统软件设计
整个系统的工作可以概括为先用键盘输入一个预期温度,然后传感器测量得到另一个实际温度,再求出预期温度与检测温度之间的差值,最后根据模糊算法调节输出控制器,使输出温度达到预期值[4]。
2.1 模糊运算模块
在模糊运算模块中,模糊控制系统的设计尤其重要,其组成如图2所示[5]。模糊控制系统一般可以分为五个部分:

图2 模糊控制系统
(1)模糊控制器。它是模糊控制系统的核心,它的主要工作是完成系统模糊推理过程与根据输入量和模糊运算做出模糊控制。模糊控制器的设计途径有根据专家的知识和经验、建立熟练操作工的控制模型和建立被控对象的模糊模型[6]。
(2)输入-输出接口。其作用是在模糊控制器和被控对象直接转换传送,在输入-输出接口装置中,不仅要有A/D和D/A的转换器,还需要有电平转换。
(3)执行机构。其主要功能就是根据模糊控制器输出对被控对象经行控制,主要是由电动机组成。
(4)被控对象的范围很广,它可以是一种设备或装置,也可以是一个生产的、生物的或其他的各种的对象过程。
(5)检测装置又可以称作传感器,它是将非电量的被控量转化为电信号的装置。一般情况下,传感器的精度会对整个模糊控制系统的精确度造成直接影响,在模糊控制系统中传感器的地方十分重要。因此应该选择精度和稳定性都相对不错的传感器作为整个系统的检测装置[7]。
2.2 设定系统
整个模糊控制系统的核心是模糊控制器,设计一个合理的模糊控制器对整个模糊控制系统的运行非常重要。模糊控制器一般由模糊化接口、模糊推理机、解模糊接口和知识库组成。一般来说,一个语言变量的语言值越多,对事物的描述就越准确[8]。
在本文中设定系统偏差E=现行温度值-设定温度值,其论域为E,划分7个等级,即E={-3,-2,-1,0,+ 1,+2,+3},相应的模糊集合为{负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)}。设定偏差变化为Ec=E1-E2,其对应的论域为Ec,系统的输出控制量设定为U,其对应的论域为U。将偏差变化和输出控制量都同E一样划分7个等级,也划分为对应的模糊集合。其次是确定各语言变量的隶属度函数,模糊语言值实际上是一个模糊子集,而语言值最终是通过隶属度函数来描述的。可以得到对应的隶属度量见表1。
最后是模糊控制规则的建立,通常采用经验归纳法。例如本文炉温的加热系统,有如下模糊规则:若温度很高,且温度上升很快,则停止加热;若炉温很低,且炉温不再上升,则快速加热等等。根据前面将误差,误差变化和控制量都取了7个语言值,即 {NB,NM,NS, ZO,PS,PM,PB}。根据以下控制规则if E is PB and EC is NB,then U is ZO和 if E is PB and EC is NS,then U is NM 等[9],可以得到表2。
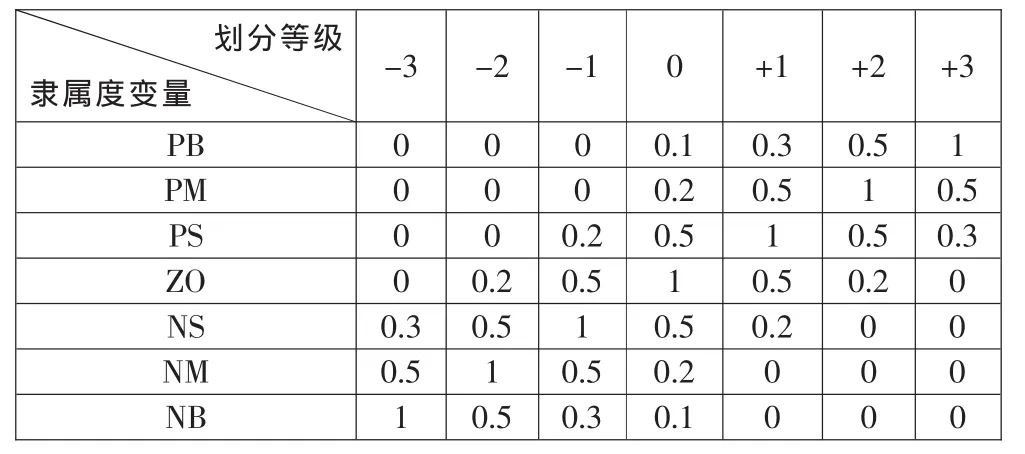
表1 模糊集的隶属度量
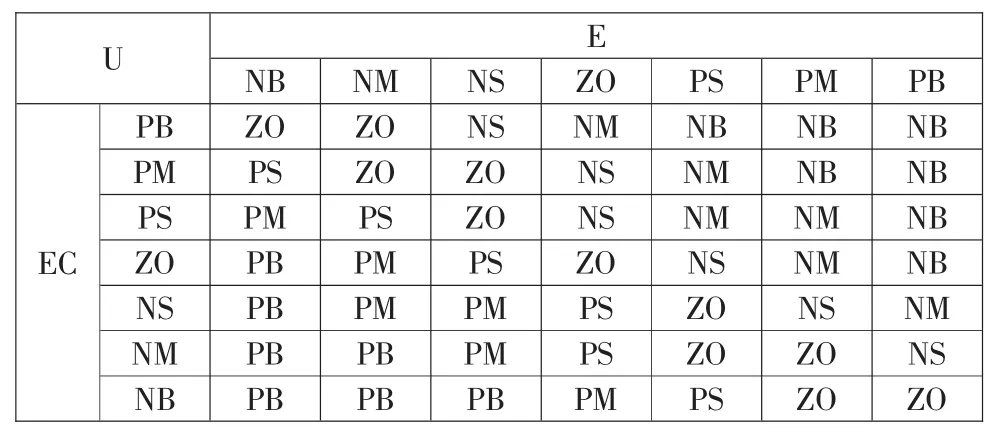
表2 模糊控制规则表
3 系统仿真
本文中被控对象是电锅炉的温度,可以近似用一阶惯性纯滞后环节来表示,设传递函数为:
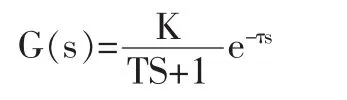
式中,K—对象的静态增益;T—对象的时间常数;τ—对象的纯滞后时间。
3.1 传统PID控制仿真
PID控制器是一种线性控制器,偏差e(t):e(t)=r(t)-y(t)。将偏差e(t)的比例、积分和微分通过线性组合构成控制量,因此称为PID控制,其系统原理如图3所示。其控制规律写成传递函数形式为:
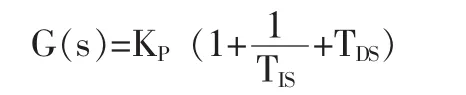
式中:KP—比例系数;KI—积分时间常数;KD—微分时间常数[10]。采用Matlab中的Simulink进行控制算法的仿真设定温度T=90℃。根据仿真得到下面的响应曲线,见图4。
3.2 模糊算法控制仿真
这里采用常规的双输入单输出型的二维模糊控制器,以误差E和误差变化EC作为输入量,经模糊化,按模糊控制规则定出输出量U作为控制量[11]。
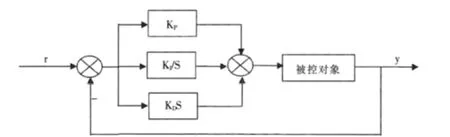
图3 PID控制系统原理图
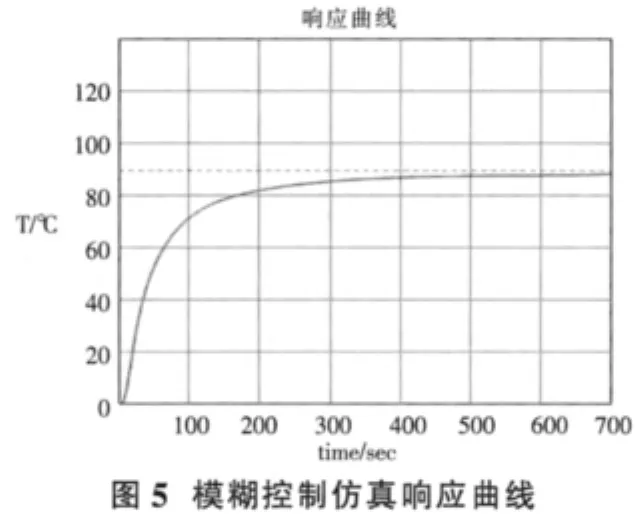
首先确定模糊控制器,对输入输出量的隶属函数进行编辑。在模糊控制器中打开Membership Function Editor窗口。单击[Edit]标签,选中其中子标签 [Add MFS],选择隶属函数曲线为7,类型默认为 trimf;根据之前确定的模糊子集[NB,NM,NS,ZO,PS,PM,PB],选择要编辑变量的图标,确定当前变量的论域范围[-3 3],将各变量的隶属函数改为与其对应模糊子集的模糊语言值[12]。然后打开模糊规则编辑窗口,以 If...and... Then...的格式写模糊控制规则,根据前面的模糊控制规则表可以得出共有49条控制规则。最后在Matlab的Simulink工具中进行系统仿真,得到模糊控制的响应曲线,见图5。
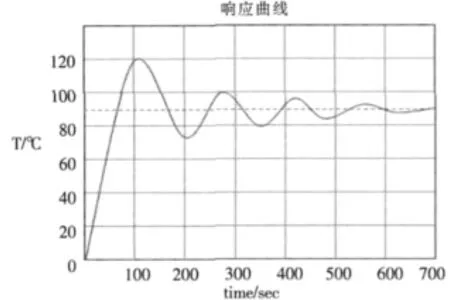
图4 PID控制仿真响应曲线
4 结论
通过将PID控制仿真得到的响应曲线图和模糊控制仿真响应曲线图对比,可以看出,模糊控制比传统PID控制,响应时间短、超调量小,稳态精度高、系统遇到干扰时能很快恢复稳态,动静态性能好。而且这种方法抗干扰能力也很强,同时对一阶惯性滞后环节的适应能力很强,由于一般温控对象的数学模型可用一阶惯性滞后环节来描述,因而这一控制方法对温控场合的适用性很强。所以可以得出基于模糊控制的温度控制系统,比传统的PID温度控制系统更具优越性。
[1]赵志正.橡胶工业制品的生产[M].北京:化学工业出版社,1985.
[2]章卫国.模糊控制理论与应用[M].陕西:西北工业大学出版社,1999.
[3]常江.自适应模糊控制方法在温度控制上的研究[D].四川:西华大学,2009.
[4]司绍伟.一种温度控制系统的设计与应用[J].河北工程技术高等专科学校学报,2006,1.
[5]郑炳坤.简单的温控箱温控电路[J].仪器与未来,2005,7.
[6]窦振中.模糊逻辑控制技术及其应用[M].北京:北京航空航天大学出版社,2001.
[7]丛丽莉.基于模糊算法的渗碳炉温度和碳势在线测控系统研究[D].辽宁:辽宁工程技术大学,2009.
[8]李雪梅.基于模糊控制的电炉温度器的研究与实现[D].山东大学,2009.
[9]黎惠成.一种基于模糊控制的温度控制系统设计[J].计算机技术与发展,2009,19.
[10]王吉龙.基于模糊PID的温度控制系统[J].电子工程师,2008,5.
[11]吉珍珍.锅炉内胆温度的模糊控制算法的仿真研究[D].西安:西安交通大学,2011.
[12]徐红明.船舶柴油机缸套冷却水温度模糊PID自适应控制及仿真[J].造船技术,2010,2.
