矿井提升机三电平变频调速系统研究
2013-03-28陈静
陈 静
(淮阴师范学院物理与电子电气工程学院,江苏淮安 223300)
0 引言
矿井提升系统是煤矿生产的关键环节之一,关系到矿井的安全和产量.为保证提升设备安全往返运行,要求提升机具有较高的调速性能、精度的位置控制以及可靠的安全保护[1].为了降低工业电机拖动能耗,现代矿井提升机多选用变频调速的传动方式.目前,大功率交流提升机拖动系统包括高压(6 KV,10KV电压等级)交流电机和高压大功率变频调速系统.高压变频器根据其变换方式可以分为直接变换式(交-交)和间接变换式(交-直-交)两类[2].交-直-交电压源型高压变频器根据拓扑结构,分为两电平式、三电平式和功率单元级联多电平式等多种结构.
为解决机械传感器带来的性能、安装、可靠性和价格等方面问题,无速度传感器技术成为电机控制的研究热点之一.本文以大功率鼠笼交流提升机变频调速系统为研究对象,介绍三电平变频器简化SVPWM控制算法和矢量控制策略原理,重点阐述基于全阶转子磁链观测器的转速辨识方法.
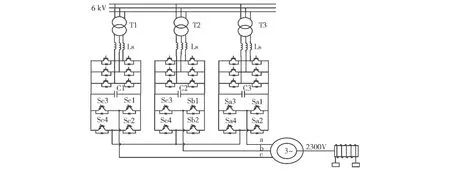
图1 交-直-交H桥三电平变频拖动系统
1 大功率鼠笼式交流提升系统简介
矿井提升机需要经常启动、停车、正反向运行,一次提升过程中速度变化可分为5个阶段:加速、匀速、减速、爬行和停车.为保证设备安全往返运行,要求提升系统的控制性能好,有较高的调速性能和位置控制,同时具有可靠的安全保护.
本文中大功率鼠笼式交流提升机系统,采用交-直-交三电平主回路结构,实现交流鼠笼电机定子变频矢量控制;同时配以高性能DSP对变频器进行控制,实现电机全数字转速闭环调节.鼠笼电机变频拖动系统主回路如图1所示.考虑矿井实际条件和电机容量,变频器采用先进的交-直-交H桥三电平拓扑结构.6KV电网电压通过三相变压器和进线电抗器与功率变换器连接,提供变压变频的三相交流电压,实现电机转速控制.
变频器主回路采用交-直-交H桥三电平拓扑结构.整流侧采用PWM整流控制,在保证直流母线电压稳定的前提下,使电网输入电流正弦化且相位可控,实现能量的双向流动[3].逆变侧采用H桥三电平逆变器,各功率单元输出电压星型联结,构成三相输出电压.
三相输出电合后共有27种输出状态,其中包括6个大矢量,6个中矢量,12个小矢量和3个零矢量.三电平电压空间矢量图如图2所示,6个大矢量将空间矢量图分为6个正三角形扇区,每个扇区又被中矢量和小矢量分为4个小三角形.
三电平电压空间矢量图可视为由6个两电平电压空间矢量构成的小六边形相互叠合而成,如图3所示.判断参考电压矢量所在的位置只需先判定其所处的小六边形,然后经过坐标平移将三电平电压矢量平面简化为两电平电压矢量平面,过渡时注意还需对参考电压矢量进行修正[4].

图2 三电平电压空间矢量图

图3 简化的三电平电压空间矢量图
2 无速度传感器矢量控制技术
图4为无速度传感器矢量控制原理框图.系统采用转速、电流双闭环PI控制,关键部分为磁链观测器模块以及速度观测器模块.
异步电机电压方程和磁链方程为:

式中:us为定子电压;is、ir为定、转子电流;Ψs、Ψr为定、转子磁链;Rs、Rr、Ls、Lr、Lm为电机参数;ωe为同步旋转角速度;ωr为转子角速度;p为电机极对数.

图4 无速度传感器矢量控制原理框图
2.1 全阶磁链观测器
图5为一种全阶闭环转子磁链观测器,由开环电流模型和自适应电压模型组成[5].电流模型在低速的时可以提供比较准确的值,而电压模型则具有较宽的速度调节范围.

图5 全阶闭环转子磁链观测器
1)电流模型
同步旋转坐标系下转子磁链电流模型为:

使d轴与转子磁链方向重合,则此时q轴分量为0,即

经反Park变换可得两相静止坐标系下的转子磁链方程:

电流模型的输出,即定子磁链Ψiαβs由下式计算:

2)电压模型
测量定子电压、电流值,两相静止坐标系下,定子磁链为:


其中:Ucomp,αβs为考虑观测误差后的补偿量,由PI调节器输出.
在两相静止坐标系下,基于电压模型的转子磁链表达式为:

3)模型之间的平滑切换
从控制理论出发,转子磁链观测器可以看作一个两输入、单输出的线性系统:

2.2 速度观测器
系统采用 基于状态方程的直接法"来辨识速度,基本原理为ωr=ωe-ωs.同步频率ωe可以通过对转子磁链角θΨr求导得到,即:

由于两相静止坐标系下的转子磁链表达式为:

将式(16)带入式(15)可得:

3 运行结果
本文提出的矢量控制技术运用于某矿暗立井提升机.该提升系统具体参数为:主电机为防爆交流异步电机;电机功率1000KW;定子电压2300V;定子电流300A,50Hz.在该条件下,三电平逆变器输出线电压实测波形如图6所示.电机线电压波形为五阶梯波,接近于正弦,同时dv/dt小,可以降低对电机绝缘的冲击以及系统EMI.
图7为提升机带负载情况下的一个提升周期中,转速给定从零速段到加速、匀速、减速、低速爬行直至停车过程中,转子磁链幅值、转子磁链角以及励磁电流、转矩电流实测波形.
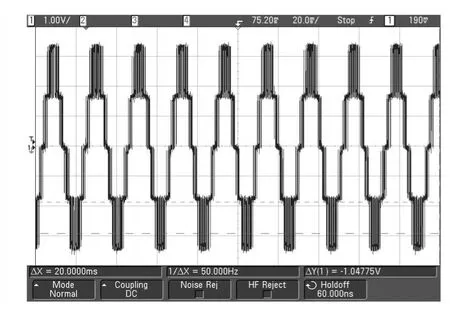
图6 电机稳态运行线电压波形
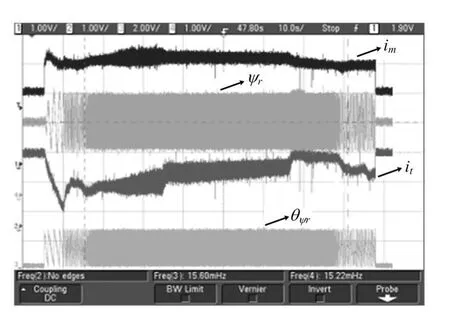
图7 提升机运行波形图
可以看出,电机加速段,在转速达到给定前,转矩电流很大,电机以最大加速度加速,经过小的超调后恢复正常.等速段,由于提升机不断上升,钢丝绳的重量不断下降,电机负载缓慢减小,电机转矩电流逐渐减小.减速时,电机转矩电流接近于零.停车阶段由于抱闸,转矩电流有小幅的回升.当电机停止运行时,转矩电流回零.现场运行结果表明,该全数字定子变频调速系统是安全可靠的.
4 结束语
采用全阶转子磁链观测器的电机矢量控制技术,实现了矿井交流提升系统的无速度传感器运行,运行结果验证了本文所用控制算法的正确性.该系统满足提升机对运行稳定性和速度精确度的需求,具有较好的应用前景和推广性.
[1] 许甫荣.高压变频调速技术应用现状与发展趋势[J].自动博览化,2007(4):14-18.
[2] 何凤有,马志勋.现代交流提升机拖动系统比较[J].工矿自动化,2009(10):20-23.
[3] 伍小杰.基于H桥单元串联式多电平高压变频器在矿井提升机中的应用[J].工矿自动化,2009(3):61-64.
[4] 邓先明,王冬冬,叶宗彬,等.基于简化三电平SVPWM算法的整流器研究[J].电力电子技术,2008(5):3-5.
[5] 李浩,谭国俊.基于全阶闭环转子磁链观测器矢量控制系统[J].电力电子技术,2008,42:30-31.
[6] 郑萍,王明渝.感应电机无速度传感器矢量控制的速度估算器研究[J].电工技术学报,2001,16(5):25-26.